考虑能见度的无信号交叉口行人与车辆冲突识别
2021-03-15 11:50马艳丽朱洁玉张宿峰
重庆交通大学学报(自然科学版) 2021年3期
马艳丽,朱洁玉,张宿峰,张 鹏
(哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090)
0 引 言
据统计,约有21%的行人死亡事故发生在道路交叉口[1],尤其在能见度比较低的环境中,交通事故发生率更高。根据文献[2],2014年雾天平均单次交通事故死亡人数约为晴天条件下的1.86倍。在低能见度交通环境下,驾驶员的可视距离变短,对交通标线、前方过街行人等难以辨别清楚,可能会做出错误判断,故在低能见度环境中车辆与行人更易发生冲突,出现交通事故概率更大。如何有效识别低能见度下的过街行人与车辆的冲突已成为车-路协同下无信号交叉口行人安全过街研究的重要内容。
行人过街受到机动车行驶的干扰显著,为保证路段上行人安全过街,同时减少人-车冲突,相关学者对人-车冲突模型、人-车冲突分析技术与方法及人-车冲突表征指标方面进行了研究。鲍怡婷等[3]根据实际调查的车辆速度和可接受间隙,提出了一种右转机动车与行人冲突运动过程的仿真模型;HUANG Zhi等[4]研究了行人与车辆的正面碰撞情况,提出了区分正面碰撞与侧面碰撞的人-车冲突距离模型;魏丽英等[5]根据人-车冲突实际情景构建了行人与机动车的冲突博弈矩阵,并给出了人-车冲突演化动力学模型;CHENG Wei等[6]分析了人-车冲突的重要影响因素,并提出了行人安全冲突指数模型;LI Fang等[7]研究了人-车单元在交叉口行驶状态下的交通冲突危险潜在反应,并结合交通规则,建立了交叉口交通冲突风险识别模型;TAN Guishan等[8]采用时距法对行人与右转弯机动车的时间分布进行研究,建立了冲突概率的计算模型;WU Jianqing等[9]通过研究车辆与行人近碰撞识别,考虑车-人碰撞风险增加,提出了一种基于路边激光雷达数据提取的道路使用者轨迹近碰撞识别方法;I.KAPARIAS等[10]基于现有车-车冲突分析技术,考虑行人运动,开发出一种共享空间环境的行人与车辆交通冲突分析技术;R.AlMODFER等[11]提出了一种基于车道的行人与车辆后侵入时间评价方法,使用视频数据记录一个无信号交叉口车辆和行人行为,分析基于车道分布的人-车冲突;CHEN Peng等[12]利用无人机视频分析了城市交叉口行人车辆冲突,分别用后侵入时间(PET)和相对碰撞时间(RTTC)表示行人与车辆冲突在空间和时间上的接近程度;陆斯文等[13]利用交通冲突技术,分析了单车道行人激进过街时与机动车之间的碰撞机理,建立了单车道人-车冲突和碰撞事故概率模型。
以上学者主要从行人与车辆冲突识别模型、分析方法与技术及表征指标等方面开展了相关研究,但对考虑能见度影响的过街行人与车辆冲突识别等问题的研究相对较少。笔者研究了无信号交叉口过街行人与车辆的交通冲突问题,考虑能见度对交通冲突影响,结合采集到的车辆及行人运动信息,对考虑能见度的无信号交叉口过街行人与车辆冲突识别方法开展研究,构建了过街行人与车辆冲突识别模型,并对模型进行有效性验证。
1 人-车冲突识别模型
1.1 行人与车辆交通冲突分析
对于每个交通参与者,其周围都有一定的敏感区,当其他交通参与者逐渐进入该区域时,双方压力剧增,进而会采取避险措施,这被认为是一起交通冲突,该敏感区定义为临界冲突区域[14]。车辆与行人避险需一定的空间距离,可使车辆与行人成功避险的最小安全距离为临界冲突区域。冲突区域示意如图1。

图1 冲突区域示意(单位:cm)
图1中:虚线圆曲线表示临界冲突区域,行人和车辆过街时,当车辆或行人进入对方的虚线区域后,驾驶员与行人都会紧张,若不采取避险措施,行人与车辆可能会存在碰撞情况,此区域即为适应紧急情况的最小安全区。
在分析车辆尺寸、速度、行人速度及人-车相对位置等因素的基础上,考虑临界冲突区域,建立人-车冲突模型。人-车冲突模型研究了行人与车辆的行驶轨迹,分析了行人与驾驶员避险的最小空间距离,综合考虑行人与车辆的运动特点,是基于运动学及车辆制动理论建立的交通冲突判别模型。由该模型可知,若车辆与行人间的距离小于临界冲突距离,说明车辆与行人存在冲突,反之则冲突不存在。
1.2 人-车冲突模型构建
行人与车辆过街时,由于车辆行进方向有所变化(分为:左、直、右这3个方向),而行人行进方向变化不大(沿人行横道),为方便分析与计算临界冲突距离,以图1(a)为例进行模型构建,所构建的冲突模型如图2。
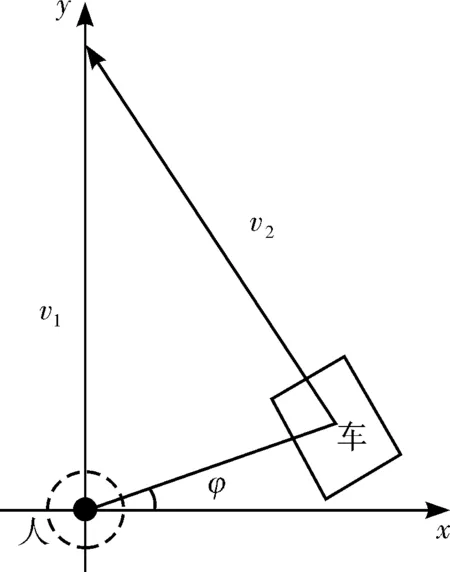
图2 交叉口人-车冲突模型
车辆在同一位置沿不同方向运动时,行人与车辆间的安全距离有所不同,因此当车辆沿着与行人连线方向运动时,所需的安全距离最大。人-车相对位置确定时,为确保车辆与行人安全,应取最大安全距离作为临界冲突半径。图1(a)中:设定行人所处位置为原点,其运动方向为y轴正向,建立直角坐标系。
根据几何关系可知车辆相对于行人的速度和加速度,并根据车辆制动理论,可得出[0, 2π)上的临界冲突半径[13],如式(1):

(1)
从微观而言,车辆应从其外侧边缘算起,因此需加入车辆尺寸影响,故在[0, 2π)上的人-车临界冲突半径如式(2):

(2)
式中:l为车辆长度,m;d为车辆宽度,m;v1为行人速度,m/s,通常取v1=1.2 m/s;v2为车辆速度,m/s;t1为驾驶员踩下制动踏板到车辆开始制动时间,s,通常取t1=0.09 s;t2为车辆制动力増长时间,s,t2取值见表1;a为车辆减速度,m/s2;φ为车辆起始位置和X轴正向之间夹角,(°)。

表1 车辆制动力增长时间
2 交通环境能见度确定方法
2.1 交通环境能见度分级标准
2007年,中国气象局综合不同能见度和公路行车安全影响因素,发布了《高速公路能见度监测及浓雾的预警预报》标准[15]。董珂洋等[16]分析大风、雨雪、大雾、高温等灾害天气对道路交通安全的影响,并提出应对措施。笔者根据文献[15-16],制定了道路能见度分级标准和相应的预警管理措施。该标准根据气象部门能见度检测和相关预报及影响交通运营的严重程度,将公路沿线的能见度按从好到坏的顺序分为0~4级,如表2。
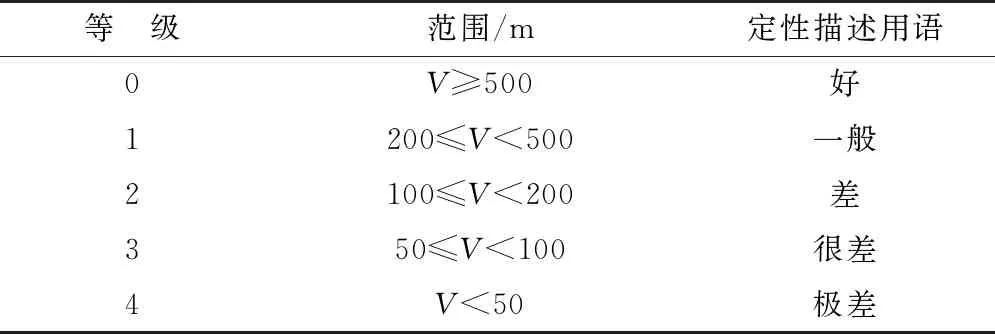
表2 能见度等级划分
2.2 基于人-车距离的交通环境能见度测算方法
能见度是表征大气透明程度的一个重要物理量,与雨、雪、雾、霾等气象条件密切相关,一般定义为具有正常视力的人在强光、雨雾、天空等散射光背景下,观测且可以辨识出安置于地面附近的适当尺度目标物的最大水平距离或在夜晚能够辨认出一定强度灯光的最大距离[17]。
能见距离大小主要与大气透明程度有关。根据大气光学中的比尔-朗伯定律,可求出空气介质中的最大能见距离,即能见度的计算如式(3):
(3)
式中:V为能见距离,m;Kλ为消光系数;L0为监控设备光心距观测目标物的距离,m;T0为当前大气透射率,一般情况下,取人眼正常视觉反应阈值为0.02。
根据式(3),利用激光测距仪测出观测点距目标物的距离L0即可计算出空气中的能见距离,根据能见度等级划分表即可确定实际交通环境的能见度等级,进一步研究不同能见度条件下人-车临界冲突半径变化情况。
3 低能见度下的人-车冲突模型修正
在雾霾、黄昏和夜间等能见度比较低的环境中,驾驶员的视觉辨认能力会受到影响,导致其对车辆操控能力发生变化,车辆速度和减速度随之改变,人-车临界冲突半径也会发生变化。与车辆相比,行人速度及加速度变化微小,对模型整体影响不大,故笔者仅考虑车辆速度及加速度变化临界冲突半径影响,进而对人-车冲突模型进行修正。
3.1 数据采集与处理
3.1.1 数据采集
构建考虑能见度的人-车冲突模型需采集车辆和行人相对位置、速度、加速度、车辆尺寸及能见度等指标信息,因此数据采集装置包括设置在车辆中的车载GPS、雷达、速度传感器、加速度传感器、车路通信车载终端及激光测距仪,实时采集行人与车辆信息,并通过无线发射器将信息发送至路侧的通讯设备。
3.1.2 数据处理
笔者以哈尔滨市果戈里—文昌街(桥下)所收集的历史资料为研究基础,原始数据以40 min为记录单位,时间为2017年7月至12月,其间包含了不同能见度的情况。车辆在各级能见度下的速度变化情况见图3。
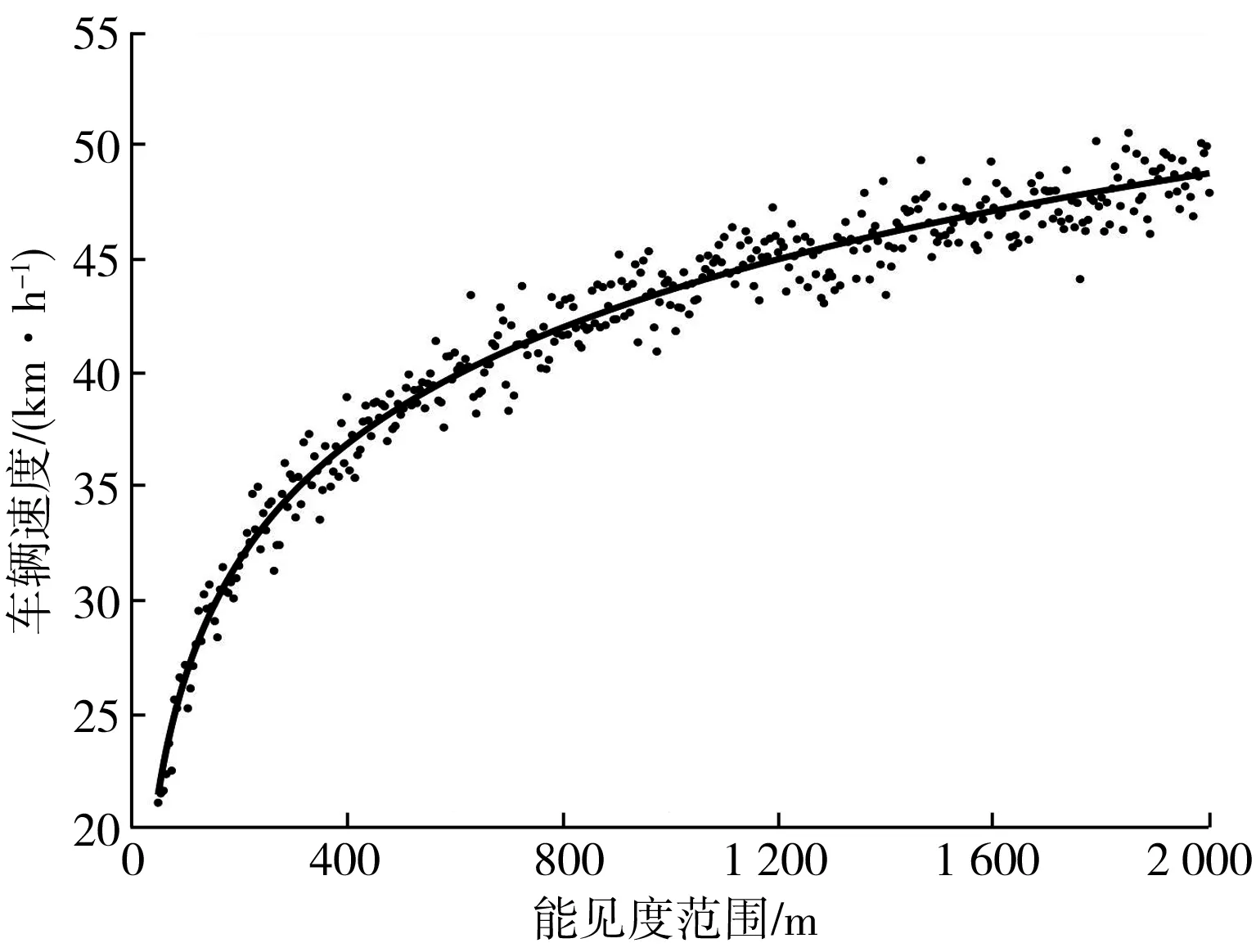
图3 各级能见度下的车辆速度变化
通过拟合可得车辆速度v2与能见度V之间的关系模型,如式(4):
v2=7.42ln(V)-7.62,R2=0.97
(4)
式中:V∈(0, 2 000]。
通过分析与计算,列出了车辆在5级能见度条件下的车辆平均速度,如表3。

表3 各级能见度下的车辆平均速度
3.2 模型参数确定
3.2.1v1、l和d确定
在不同能见度下行人速度变化较小,可按1.2 m/s进行计算,故v1=1.2 m/s。笔者以总质量在4.5 t以下的小汽车为研究对象,通过调查小汽车规格尺寸取其平均值,即l=4.5 m,d=1.7 m。
3.2.2t1、t2和a确定
t1为驾驶员踩下制动踏板到牢辆开始制动的时间,通常取t1=0.09 s;t2与汽车质量有关,根据车辆制动力增长情况表,t2=0.24 s。车辆在不同能见度条件下行驶时速度不同,路面附着力系数随之变化,导致车辆最大减速度不同,故应对车辆加速度进行修正,以保障驾驶员安全行驶。在道路材料、路面状况、轮胎结构、胎面花纹一定情况下,车辆最大减速度计算如式(5):
amax=μg
(5)
式中:amax为车辆最大减速度,m/s2;μ为路面附着力系数;g为重力加速度,g=9.8 m/s2。
不同行车速度下的路面附着系数见表4(雨雪情况除外)。根据插值法可计算不同能见度条件下的平均减速度,其具体取值如下:
1)当500 m≤V≤2 000 m时,能见度等级为0级,天气状况正常,a=7.98 m/s2;
2)当200 m≤V<500 m时,能见度等级为1级,a=8.03 m/s2;
3)当100 m≤V<200 m时,能见度等级为2级,a=8.08 m/s2;
4)当50 m≤V<100 m时,能见度等级为3级,a=8.15 m/s2;
5)当V≤50 m时,能见度等级为4级,a=8.21 m/s2。
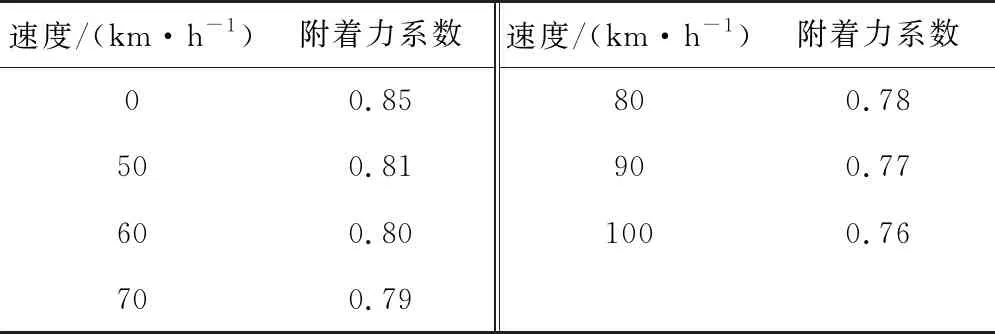
表4 不同车速下的路面附着系数
3.3 模型修正
笔者分别将0~4级能见度条件下的临界冲突半径记为R0、R1、R2、R3和R4,则各级能见度下的人-车冲突修正模型如式(6)~(10):
(6)
(7)
(8)
(9)
(10)
记修正后的临界冲突半径为R′c,行人与车辆间的实际距离为Rv,则修正后的模型如式(11):
(11)
考虑能见度下人车冲突识别方法:当Rv>R′c时,认为人车之间不存在冲突;当Rv≤R′c时,认为人车之间有冲突存在。
3.4 模型有效性验证
3.4.1 实验设计
为验证低能见度下无信号交叉口人-车冲突修正模型冲突模型是否合理,笔者以哈尔滨春龙路—黄河路无信号交叉口为例展开详细说明。分别选取了不同能见度下此交叉口的50个案例进行分析,摄像机拍摄视频帧频为30,每帧像素为1 280×720,图4分别为4~0级能见度下所拍摄的路口交通情况。

图4 不同能见度下的路口交通情况
通过观察交通参与者是否有冲突发生时的转向、减速等避险行为,判断实际冲突情况,并与模型计算结果进行比较,以检验模型的有效性。以1级能见度为例进行说明,其具体步骤如下:
1)提取视频中行人与车辆的相对位置
根据激光测距仪所测距离L0,计算能见度,将各个参数带入代入式(7)计算临界冲突半径R′c。根据测算可知φ=45°,由式(3)可知V=349.82 m,故有式(12):

2.41=11.35 m
(12)
2)进行判断
若Rv≤R′c,则认为行人与车辆存在冲突,反之则认为行人与车辆不存在冲突。通过估算可知Rv=1.1 m 3)对比分析 将所得结果同车辆、行人实际情况对比分析,确定与事实相符案例数,得出模型准确率。 3.4.2 结果分析 对50个在5种能见度等级下的有效案例进行分析,将人-车冲突识别模型结果与实际冲突数与进行对比,以检验无信号交叉口人-车冲突模型的适用性与准确性,其统计验证结果如表5。通过对模型进行实例验证,表明该模型平均准确率为82.4%,能对不同能见度下的无信号交叉口行人与车辆冲突进行有效地识别。 表5 人-车冲突案例分析结果 笔者研究了无信号交叉口车辆与过街行人冲突识别问题。运用车载GPS、车辆速度传感器、加速度传感器、车路通信车载终端及激光测距仪采集了车辆和行人的相对位置、速度、加速度、车辆尺寸等信息,构建了过街人-车冲突识别模型,给出了车辆速度与能见度之间的关系模型,并在此基础上对冲突模型进行修正,对该模型有效性进行验证。结果表明:该模型结合行人与车辆运动信息,综合考虑交通环境能见度等级和车辆尺寸对人车冲突区域影响,可对无信号交叉口过街行人与车辆冲突进行有效识别,冲突识别率可达到82.4%。该研究可为无信号交叉口的行人提供决策,给驾驶员提供有效避让行人的信息,从而降低过街行人与车辆间的交通事故率,提高低能见度下无信号交叉口行人和车辆的安全性。 此外,笔者研究成果也能用于不同能见度下无信号控制路段的过街行人与车辆冲突识别,无信号控制路段的人-车冲突大致为垂直冲突,属于文中研究中(不同运动方向的车辆与行人冲突)的一种情况,该研究可为无信号交叉口与路段安全分析提供理论支持。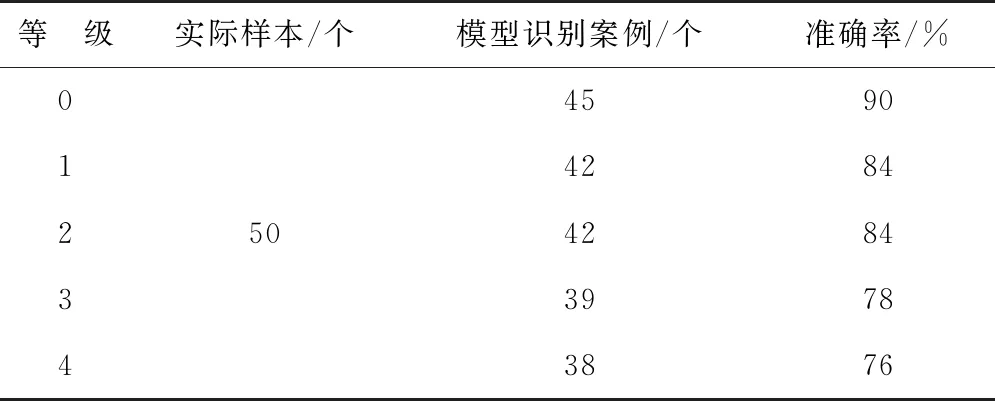
4 结 论
猜你喜欢
建材发展导向(2022年14期)2022-08-19
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
建材发展导向(2021年19期)2021-12-06
意林(2021年5期)2021-04-18
扬子江(2019年1期)2019-03-08
科技创新与应用(2018年11期)2018-04-25
农业与技术(2017年13期)2017-08-23
小天使·一年级语数英综合(2017年6期)2017-06-07
安徽农业科学(2016年4期)2016-10-21