基于激光点云的铁路边坡表面形变检测方法
2021-03-14 10:01:14刘俊博刘俊尧孙淑杰王胜春王凡戴鹏
铁道建筑 2021年11期
刘俊博 刘俊尧 孙淑杰 王胜春 王凡 戴鹏
1.中国铁道科学研究院集团有限公司基础设施检测研究所,北京 100081;2.中国铁路广州局集团有限公司工电检测所,广州 510800
山区铁路线路长大边坡易受天气变化和地质活动的影响,潜在的滑坡风险威胁行车安全[1]。定期对沿线边坡进行安全检测,分析边坡表面变化趋势,进而采取相应的加固措施,是保障行车安全的重要措施。
以往检测监测大型建筑物形变主要依赖人工测量数据,不仅耗费大量人力物力,而且检测结果难以反映建筑物形变的真实情况。近年来国内外学者和研究机构提出一些高效的方法,已在地表形变监测[2]、矿山形变监测[3]、边坡形变监测[4]、大坝形变监测[5]、隧道形变检测[6]、铁路建筑限界检测[7]等领域广泛应用。现有检测监测方法按照观测方式分为动态检测方法和静态监测方法。动态检测方法采用遥感∕航空摄影[8]、干涉合成孔径雷达[9]、机载∕车载三维激光扫描仪[10-11]等手段获取建筑物的三维形态数据;静态监测方法采用多个摄像机[12]、全站仪[13]等设备获取建筑物不同方位的三维形态数据。然后采用图像处理、点云处理等技术对观测数据进行处理和分析,得到建筑物形变情况。
上述方法应用于铁路边坡形变检测任务时仍存在一些不足:铁路沿线边坡数量多,位置分散,现有的动态检测方法无法在短时期内对多个分散的目标重复观测,数据采集成本高;铁路沿线边坡普遍存在于山区,自然环境、地质地貌非常复杂,难以架设和维护固定的监测设备,难以利用现有的静态监测方法;现有方法数据处理步骤复杂,无法高效检测出铁路边坡的形变。
为解决上述问题,本文提出一种基于激光点云的铁路边坡表面形变检测方法,从数据采集、点云处理方法和铁路边坡形变检测方法三个方面进行改进,以高效、准确地检测铁路边坡表面形态变化。
1 数据采集
铁路沿线环境三维点云数据的采集效率和数据精度直接影响铁路边坡形变检测任务的可实施性和检测结果的准确性。因此,设计了一种铁路环境三维点云数据采集系统,配置如图1所示。
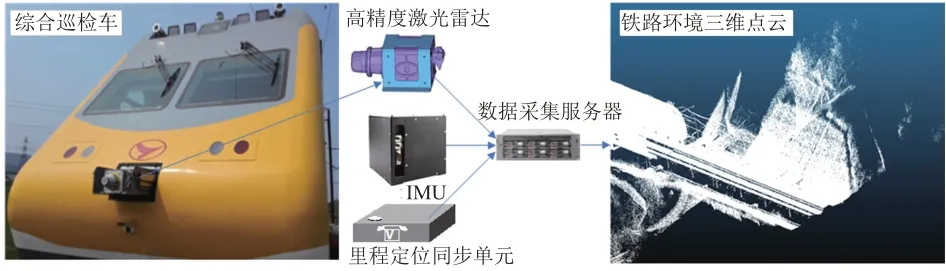
图1 铁路环境三维点云数据采集系统配置
该系统以综合巡检车为平台,能够完整地获取铁路沿线环境的三维点云数据,包括铁路基础设施、建筑物、自然环境等。每个三维空间点表示为(x,y,z)三元组,其中,x表示空间点沿轨道方向的里程,y表示空间点距离激光雷达的纵向距离,z表示空间点距离激光雷达的横向距离。使用特制的安装工件将高精度激光雷达固定在综合巡检车车头的中心位置。扫描线频率为200 Hz,点频率为每秒60 万点,扫描角度为360°,测程为1.5~500 m。
综合巡检车在高速运动状态下不可避免地会产生振动、横纵向位移、侧滚等姿态变化,挂载的高精度激光雷达也会随之发生位置偏移,导致输出的空间点坐标存在误差。因此,利用3 轴加速度计、3 轴陀螺仪和地磁计组成惯性测量单元(Inertial Measurement Unit,IMU),测量激光雷达的运动轨迹,动态校正激光雷达输出的铁路环境空间点坐标。
里程定位同步单元由全球导航卫星系统(Global Navigation Satellite System,GNSS)、射频标签阅读器、光电轴头编码器组成,能获取高精度里程定位信息。
数据采集服务器利用运动参数信息计算激光雷达的运动轨迹,校正空间点坐标后,与里程定位信息组合为三维点云数据存储至硬盘。
2 点云配准及体素化
2.1 点云配准
由于每辆综合巡检车的安装工件和激光雷达安装位置存在误差,不同综合巡检车采集的铁路环境三维点云很难对应,无法用于形变检测。因此,需要利用点云处理方法将当期点云与基准点云进行配准。
迭代最近点(Iterative Closest Point,ICP)算法[14]是最常用的点云精确配准算法。在每轮迭代中,通过计算待配准点云P中每个空间点Pi在基准点云Q中距离最近的空间点,求解最优的旋转矩阵R和平移矩阵T,使代价函数J最小化;然后将旋转矩阵R和平移矩阵T应用于待配准点云P,进行下一轮迭代。
铁路环境三维点云的点数量庞大,在80 km∕h 速度条件下,每公里多达2 700 万个空间点数据,如直接使用ICP 算法进行迭代配准,不仅会耗费大量计算资源和时间,还容易使算法陷入局部最优解。因此,需要利用先验信息来降低计算量。
铁路环境三维点云中,钢轨顶面宽度和轨距是固定的已知量,且钢轨顶面区域具有明显的几何特征。基于此先验信息,先利用坐标阈值法快速地从点云数据中找到属于钢轨顶面区域的空间点,再利用ICP 算法对钢轨顶面区域的空间点进行迭代计算,得到最优的R和T矩阵,最后将R和T应用于当期点云,实现铁路环境三维点云的快速配准。配准结果如图2 所示,其中白色、蓝色和红色分别表示基准点云、当期点云和钢轨顶面区域点云。

图2 铁路环境三维点云配准结果
基于此,ICP算法的代价函数J可表示为

式中:N表示点云P中属于钢轨顶面区域的空间点数量;为点云Q中距离Pi最近的钢轨顶面区域空间点。
2.2 点云体素化
在实际数据采集中,激光雷达会受工况条件的干扰,如温度、大气气溶胶颗粒物浓度、观测目标的材质、表面光滑程度等。这些因素会导致扫描的空间点坐标存在偶然误差。因此,计算边坡表面形态变化量时要先对空间点进行体素化处理,防止误差累积引起的计算结果不准确。
点云体素化是指利用统一大小的立体像素块填充三维空间表示点云几何形态的过程[15],分2个步骤。
1)设立体像素块尺寸为m,则点云数据在x、y、z三个方向的立体像素块数量Nx、Ny、Nz分别为F[(xmax-xmin)∕m]、F[(ymax-ymin)∕m]、F[(zmax-zmin)∕m],其 中F表示向下取整的函数;xmax、xmin、ymax、ymin、zmax、zmin分别为点云数据在x、y、z三个方向的最大值和最小值。。
2)计算每个立体像素块Vi的三维空间坐标(,),计算公式定义为

式中:分别为立体像素块Vi包含的空间点的x、y、z坐标的集合;μ表示计算平均值的函数。
m的大小要根据观测目标的实际尺寸确定。m过大会造成分辨率不足,不利于计算形变区域边界线;m过小则无法降低随机误差的影响。
3 铁路边坡表面形变检测
铁路边坡表面形变检测的过程分为3个步骤。
1)基于先验信息设定激光强度阈值和边坡距离阈值,从三维点云数据中分割出属于边坡区域的点云数据,防止沿线其他建筑物、设备和部分植被对计算结果产生干扰。
2)利用区域生长算法[16]对体素化后的基准边坡点云进行拟合,空间特性相似度较高的立体像素块视为同一平面,如图3所示。其中,具有不同空间特性的区域使用不同颜色标识。
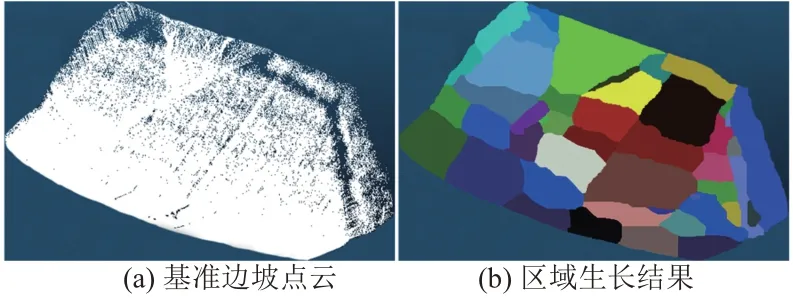
图3 基准边坡点云区域生长结果
3)将当期边坡点云进行体素化处理,并计算每个立体像素块Vi与相应的基准边坡区域平面的距离作为边坡表面形态变化量Sij,计算公式定义为

式中:aj、bj、cj、dj分别为立体像素块Vi对应的第j个区域平面方程的系数。
计算得到所有当期点云立体像素块的形变量后,即可得到最终的形变检测结果。
4 试验验证
试验采用我国南方某铁路线路中同一边坡连续3个月采集的3 期观测数据。该边坡在第3 个月时发生了小规模的滑坡事件,有利于验证本文方法的有效性。试验中使用第1期采集的铁路环境三维点云数据作为基准。试验分为3个步骤。
1)将第2 和第3 期三维点云数据与基准点云数据配准;
2)设定相关阈值从三维点云数据中找到属于边坡区域的空间点数据,并进行体素化处理;
3)采用区域生长算法拟合基准边坡点云数据,得到多个区域平面,并分别计算第2 和第3 期边坡点云数据中每个立体像素块与基准点云平面距离作为边坡表面形变量,得到形变检测结果。
图4为边坡表面形变检测结果。图中不同颜色表示不同形态变化量的区域,形态变化量小于10 cm 的区域使用绿色标识,形态变化量在10~ 20 cm 的区域使用蓝色标识,绿色和蓝色形变区域大部分是由于边坡表面的植被变化导致;形态变化量在20~30 cm 的区域使用黄色标识,形态变化量超过30 cm 的区域使用红色标识,黄色和红色形变区域应重点关注。

图4 边坡表面形变检测结果
由图4 可以看出,第2 期边坡点云数据的检测结果中,边坡中上部检测出2块红色警示区域,说明该区域发生山体滑坡的风险较高;第3 期边坡点云数据的检测结果中,由于该边坡已经发生了山体滑坡,滑脱的泥石和植被导致边坡中上部和中下部均检测出大面积的红色警示区域,检测结果与现场勘测的结果一致。可见,本文方法的检测结果能够正确反映铁路边坡表面形态变化情况,可高效检测铁路边坡形变。
5 结论
本文提出了一种基于激光点云的铁路边坡表面形变检测方法。主要创新点如下:
1)利用综合巡检车安装高精度激光雷达、惯性测量单元和里程定位同步单元,实现铁路环境三维点云数据的动态采集,提升了三维点云数据的采集效率,降低了数据获取的时间成本和经济成本。
2)结合铁路场景固有的先验知识改进现有配准算法,提出一种铁路点云快速配准算法,提升了铁路点云配准的效率和精度。
3)利用点云处理方法结合基准点云数据,快速计算边坡表面变化量,提升了铁路边坡表面形变检测的自动化程度,降低了铁路边坡形变检测工作的难度。
4)本文方法能够高效、准确地检测铁路边坡表面形态变化,检测结果客观性强,增强了铁路行车安全性,能够为铁路边坡整修计划提供数据支持。
猜你喜欢
音乐教育与创作(2023年10期)2023-11-16 10:04:54
艺术家(2023年8期)2023-11-02 02:05:28
北京测绘(2022年5期)2022-11-22 06:57:43
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
汽车观察(2021年8期)2021-09-01 10:12:41
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
现代工业经济和信息化(2016年22期)2016-08-23 11:55:32
水利科技与经济(2016年8期)2016-04-22 03:41:38