基于多电平换流技术的柔性直流输电系统
2021-03-12 05:49:06张伟郭利然蒋英平
电气开关 2021年4期
张伟,郭利然,蒋英平
(国网浙江省电力有限公司杭州供电公司,浙江 杭州 310000)
1 引言
传统电能是以交流电的形式进行传输,随着用电规模日益增大,电力系统的规模也随之扩大,从而导致交流输电走廊不断扩大,对生态环境产生一定的破坏,同时交流输电系统具有线路损耗大、电磁干扰严重、无法与异步电网进行互联等缺点,基于以上局限性,直流输电技术近些年来得到了广泛的关注[1]。
近些年来绿色环保理念在各个领域得到了关注,风力发电、光伏发电等分布式能源发展迅速,分布式发电系统需要接入电网,通过交流方式实现并网会对电网产生冲击,进而对电网的稳定运行构成一定威胁,然而采用直流方式进行并网可以有效降低冲击电流对电力系统的危害。直流输电技术对交流系统的不同节点进行连接,通过电力电子变换装置将交流电转为直流电,实现直流电能的传输。由于交流电力系统中包含了直流输电环节,因此该系统既具有原系统在电力生产、应用等领域的优势,又可以克服交流输电系统自身的缺点,从而保证电能传输的高效性和电力系统运行的可靠性[2-5]。
电压型换流装置是直流输电系统的核心单元,常见的换流装置一般采用两电平或者三电平调制方式,需要保证各串联功率器件开关的一致性,主要应用在高压大功率领域。多电平换流器(MMC)通过各个模块间的串联来共同分担直流母线电压,避免了功率器件之间的串联,同时可以按串联的模块数量对电平数进行调整,保证了系统输出波形的正弦度。
本文基于上述原理,提出一种以多电平换流(MMC)技术为核心的直流输电系统,对模块化多电平换流器的柔性输电模型进行搭建,并进行了仿真验证,该系统具有资源消耗少、节能效果好、稳定性高等优势。
2 系统概述
2.1 柔性直流输电概述
柔性直流输电采用功率器件和脉宽调制技术(PWM)来实现,一般采用电压型换流装置,柔性直流输电在新能源并网领域广泛应用,可以满足远距离孤岛供电、城市电网供电和异步交流电网互联等需求。
柔性直流输电与传统的直流输电相比,采用了脉宽调制技术并配合使用可关断开关器件,因此具有如下特点:
(1)采用PWM对全控器件进行导通和关断控制,无需外界电网提供换相电压,因此可以向无源网络进行供电,可以实现远距离孤岛供电。
(2)采用直接电流控制算法与电压前馈相结合,通过矢量控制实现有功和无功解耦控制。
(3)通过改变直流电流的方向即可实现潮流反转,无需改变系统控制参数和线路结构,整个反转过程仅需几个毫秒即可完成。
(4)柔性直流输电可以对电压精确控制,通过无功控制可以抵消系统瞬态过压,从而提高了交流系统的输电能力和容量。
(5)电力系统正常运行时,柔性直流参考电压以交流电压的幅值和频率为基准;系统故障时,柔性直流立刻启用自身参考电压,向系统内的重要负荷供电,并协助电网恢复供电和实现黑启动功能。
(6)电压恒定,通过对有功潮流进行调节,或者有功恒定,通过无功功率调节都可以对交流电网的功角稳定性进行改善。
2.2 多电平换流技术概述
模块化多电平换流器(MMC)拓扑通过对子模块级联数量的调整来实现电压、功率等级的变化,根据子模块的数量可以实现任意电平输出,从而提高输出电压的电能质量,降低功率器件的开关频率[6]。多电平换流器的模块化设计提高了系统了可扩展性,为冗余控制的实现提供了条件,各模块共母线连接,可以实现背靠背结构,模块化多电平换流器拓扑结构如图1所示。

图1 模块化多电平换流器拓扑
与两电平、三电平换流器相比,多电平换流器具有以下特点:
(1)各个开关器件承受的电压较小,且平均分配,可有效降低器件的耐压值,可在高压大功率场合应用。
(2)交流输出特性与模块级联数有关,子模块数增加,电平数也随之增加,输出波形的正弦度就会提高,谐波畸变率也会相应降低。
(3)输出相同电压时,多电平换流器各功率器件的幵关频率低,从而降低了开关损耗,提升了系统效率。
(4)多电平结构可以避免多重化变压器的使用,减小了设备的体积和重量,既降低了成本又提高了系统了可靠性[7]。
3 模块化多电平换流器
3.1 工作原理
MMC的拓扑结构如图1所示,三相多电平换流器由六个相互对称的桥臂构成,每个桥臂包括N个子模块和一个电抗器,每一相包括2N个子模块。三相MMC系统等效电路图如图2所示,通过可控电压源uai,ubi,uci(i=1,2)来等效三相各子模块的桥臂电压,其中1表示上桥臂,2表示下桥臂。i为各个桥臂流过的电流。

图2 MMC等效电路图
为了保证直流侧系统电压稳定,每相上下桥臂子模块的输入要对称互补,一般要求同相上下两个桥臂的子模块互补对称输入,同时还要保证同相上下桥臂导通模块数之和要与一个桥臂的子模块数量相等[8]。
以直流侧电压4000V,MMC每个桥臂子模块数为4为例,由MMC电路拓扑及相关原理分析可知,每个模块的电容电压限值为1000V,桥臂导通状态与输出电压关系如表1所示。

表1 桥臂导通状态与输出电压关系
3.2 调制方法
为了降低输出电压、电流的谐波畸变率,交流侧需要实现多电平输出,因此需要采用特殊的调制方式。多电平换流器的调制方式与电平数、开关频率和电容均压控制的难易程度有关系,对于输出电平较多的MMC,通常采用低开关频率的调制方法以降低开关损耗,提高系统效率,常见的调制方法包括特定谐波消除法、空间矢量PWM法和最近电平调制法,前两种方法在多电平调制中应用时计算量大,实现困难,因此最近电平调制法更适用于多电平换流器[9]。
最近电平调制法将阶梯波进行叠加从而与正弦波逼近,通过对目标电压的量化逼近实现调制的目的,量化误差与电平数有关,电平数越多,其误差越小,由于调制和控制算法相分离,控制算法的难易程度不会随之改变[10]。子模块数N=5时调制示意图如图3所示。

图3 最近电平调制示意图(N=5)
4 多电平换流器建模与控制
本文中换流器采用矢量控制策略,通过dq轴电流解耦实现直接电流控制。通过3s/2r坐标变换将三相交流量变换成两相直流量,并在dq坐标系中建立控制算法数学模型。下面在MMC拓扑结构基础上,对其数学模型进行建模。
4.1 MMC数学模型
根据基尔霍夫电流定律和电压定律可知,三相电流ik(k=a,b,c)可以表示为:
ik=ipk+ink
(1)
式中,p表示上桥臂,n表示下桥臂,在三相静止坐标系下多电平换流器的时域数学表达式如下:
(2)
式中,L表示桥臂电感,R表示桥臂等效电阻,vk=(unk-upk)/2(k=a,b,c),对式(2)进行旋转坐标变换可以得到dq坐标系下MMC的数学模型:
(3)
对式(3)进行拉普拉斯变换得到频域数学模型,表达式如下:
(4)
由dq变换可知uq=0,进而可以求得交流系统与换流器间的有功功率和无功功率如下:
(5)
4.2 控制系统设计
多电平换流器控制采用矢量控制策略,并采用双闭环控制方法,即功率外环电流内环控制。式(4)中ud、uq为电网电压前馈分量,ωLiq,ωLid为dq轴电流耦合分量,vd,vq为电流控制器输出的电压指令,表达式如下:
(6)
内环电流给定值可由外环得到,由式(5)可知,根据有功和无功功率的给定可以得到dq轴电流给定,如下所示:
(7)
根据自动控制理论,给定电流与实际反馈电流的差值进行比例积分运算可以实现无静差调节,同时可以保证系统的动态性能。
5 仿真验证
为了验证上述模型的正确性,通过仿真对其进行验证,构建一个3条直流线路的柔性输电系统,其中包括3个换流装置,假设交流源是理想的。换流站1采用恒压控制,换流站2和3采用定恒功控制,系统控制系参数kp=1.2,ki=4.5。系统仿真波形如图4所示。

图4 系统仿真波形
由图4可以发现:采用功率、电流双闭环矢量控制策略具有较好的控制效果,系统在0.8s左右进入稳定运行状态。为了验证系统的动态特性,在3s时将换流站3的功率进行突变,如图5所示。
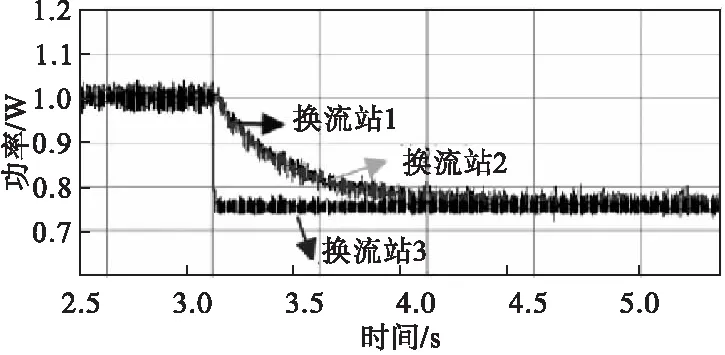
图5 系统动态仿真波形
此时换流站1和2按各自的功率-电压曲线进行功率自调节,最终实现系统的功率平衡和稳定输出,具有较好的性能。
6 结论
基于多电平换流技术对柔性直流输电系统进行设计,根据MMC的运行特性搭建数学模型,对换流器的控制系统进行设计,并对其进行仿真验证,仿真结果证明了系统具有良好的稳态和动态特性。采用多电平换流技术的直流输电系统,克服了传统交流输电系统的缺点,降低了功率器件的开关损耗,有利于降低成本和提高系统效率,为电力系统的稳定运行提供了有力保障。
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:44:26
电子制作(2019年11期)2019-07-04 00:34:54
中国实用神经疾病杂志(2018年9期)2018-05-25 01:01:08
电测与仪表(2016年22期)2016-04-12 00:19:58
通信电源技术(2016年5期)2016-03-22 01:10:10
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
电气传动(2015年4期)2015-07-11 06:10:56
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
中国医药导报(2015年20期)2015-01-11 03:01:27