小型化微带天线及雷达探测系统的设计
2021-03-11 08:08:26陈瑞东杨志江邱定忠
智能物联技术 2021年2期
陈瑞东,杨志江,邱定忠
(杭州电子科技大学 新型电子器件与应用研究所,浙江 杭州 310018)
0 引 言
随着社会的发展,雷达在我们生活中起着越来越重要的作用,各种雷达的具体用途和结构不尽相同,但基本形式是一致的,包括发射机、发射天线、接收机、接收天线、处理部分以及显示器,还有电源设备、数据录取设备、抗干扰设备等辅助设备。
在军事领域中,因为不明人、物或一些未知载具的不断干扰, 军事基地对安全性要求越来越高,而我们可以利用雷达来对这些安全隐患进行监控和排除。雷达发射电磁波对目标进行照射并接收其回波。 在和目标物体不进行接触的情况下,利用非接触探测方式来获取目标的相关信息。
由于现存的微带天线在传输过程中能量损耗较大,不仅电磁波信号产生了失真,而且不利于微带天线的小型化, 所以本文对此做了进一步的探索。本文设计的雷达探测系统是用来探测进入军事管理区域的可疑目标物,如坦克、炮车、持有枪支弹药的恐怖敌对分子。当这些目标物体进入军事安全管理区域之后,系统的前端发射装置将电磁波发射出去,然后利用接收天线接收反射的回波来对目标物进行探测,用来提醒军事管辖区的人员有可疑目标进入军事管理区域。系统对尺寸和功耗具有严格要求,天线的长度不能超过40mm,宽度不能超过40mm;在功耗方面,系统要求的工作电压是9V,可以通过普通的9V(1.5V×6)干电池进行供电,同时在单片机的选型上面也需要选择低功耗的单片机。
1 微带天线的基本理论
1.1 基本原理
在一个双面覆铜或者金的介质基片上,利用激光刻蚀技术在一面刻上任意形状的贴片,另一面与接地板相连, 通过微带或者同轴的方式进行馈电,并且具有发射和接收电磁场功能的天线称之为微带天线。微带天线是通过天线的辐射贴片和接地板之间所形成的缝隙来产生电磁场的,因此微带天线也叫做缝隙天线。虽然微带天线的形状、种类、尺寸各有不同,但是其辐射原理是基本一致的,图1 所示是矩形的微带天线辐射原理图。

图1 矩形微带天线辐射原理图a)侧视图 b)俯视图Figure 1 Radiation principle diagram of rectangular microstrip antenna
1.2 理论分析
微带天线的理论分析其实就是求解出天线周围产生的电磁场, 进而得出表明天线特性的特性参数,如增益、带宽等。 也就是说只需要分析出天线周围的场区分布,所有的问题就迎刃而解。到目前为止, 有3 种比较成熟的理论分析方法得到了广泛应用:传输线理论、空腔模型理论和全波分析理论。
传输线理论和空腔模型理论, 在分析薄的介质基片的微带天线时, 对整体的性能没有太大的影响,误差也不会太大,可以忽略不计。 当微带天线的厚度达到一定值时, 这两种方法存在一些缺陷, 它们没有考虑矢量场在辐射贴片垂直方向上的变化,故会引起较大的误差。 与传输线理论、空腔模型理论两种数值分析方法不同, 全波分析理论是以三维空间的计算量很大的格林函数为基础, 因此此分析方法是三种分析方法中最为精确的一种。 该理论不仅可用于分析形状规则的微带天线,也可以分析形状不规则的微带天线。 换句话说,此方法可以分析各种类型、各种尺寸的微带天线,不受天线结构影响。
1.3 馈电方式
微带天线馈电是指对辐射贴片长度的方向上伸出一个分支,并与贴片集成在一起的馈电。 微带天线的馈电方式主要有侧馈和背馈两种,如图2 所示。 由于与贴片是集成在一起的,故通过HFSS 软件确定了天线的尺寸之后,可以利用绿激光刻蚀机与辐射贴片同时进行刻蚀,然后通过计算出天线的输入阻抗, 利用TXline 即可得出阻抗匹配转换器的尺寸,之后接入天线单元中,从而就制成了微带天线。
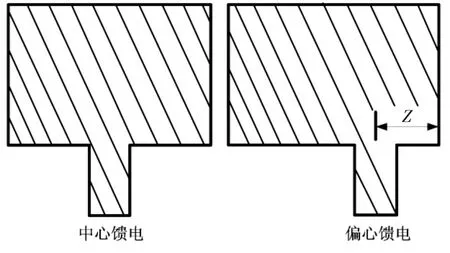
图2 微带天线馈电的结构Figure 2 Microstrip antenna feed structure
同轴线馈电又称为背馈[1]。 顾名思义,就是馈电点在印制电路板的背面, 同轴线内的传输线贯穿电路板连接到电路板的另一面贴片上面,如图3所示。

图3 同轴线馈电Figure 3 Coaxial line feed
1.4 辐射特性参数
微带天线的辐射特性参数有3 个。 一是方向图:它是三维立体架构的图形,描述的是电磁场和电磁波在空间的分布情况。 二是方向性系数:在相同辐射功率的前提下,在某个给定方向上天线辐射强度(E)和所有方向上天线辐射场强(E02)的比值称之为方向性系数[2],如式(1)所示。

三是增益:以相同输入功率为前提,天线在某一指定方向与全方向上功率密度的比值称之为天线的增益[3],如式(2)所示。

1.5 电路特性参数
一是输入阻抗。 输入阻抗由两部分组成,即电阻分量(Rin)和电抗分量(JXin),如式(3)所示:

二是带宽。绝对带宽的计算如式(4)所示。式中fh为最高工作频率,fl为最低工作频率。

根据绝对带宽, 可以得出天线的相对带宽,如式(5)所示,式中f0为中心工作频率。

在实际情况下,经常也用电压驻波比(VSWR)来代表带宽BW:

在式(6)中,Q 为天线的品质因数,VSWR 是用来衡量天线与传输线之间的阻抗匹配程度。 一般VSWR 在1~2 之间, 数值越小表明匹配的程度越好,天线的功耗越小。
2 微带天线的小型化技术
2.1 采用高介电常数[4]或者高磁导率基片[5]
当设计的微带天线介质基片厚度远远小于工作波长时,该微带天线的谐振频率为:
式中:L 为辐射贴片的长度,f 为天线的中心工作频率,c 为真空中光的传播速度,εr为介质基片的相对介电常数。 天线的工作频率是固定不变的,天线的尺寸与介质基片的介电常数的平方根成反比。 也就是说,当工作频率不变时,L 随着介质基片的增加而减小,从而达到了缩小天线尺寸的效果。
2.2 曲流技术
曲流技术又称为开槽技术,包括在辐射贴片的表面进行开槽和在接地板上面开槽两种类型。由公式(7)可以知道,开槽之后天线的辐射贴片的有效长度变长,从而能够减小天线的尺寸。 图4 表示的是在辐射贴片表面开槽的示意图。 当在表面开槽时,其电流路径明显比普通矩形的路径长,使天线辐射的有效长度增加,从而使谐振频率降低,进而能够达到减小天线尺寸的效果。

图4 辐射贴片开槽Figure 4 Radiation patch slotting
2.3 加载短路探针
在减小天线的尺寸方面,也可以运用加载短路探针的方法。这种方法的原理是在谐振腔内引入耦合电容之后, 在接地板和辐射贴片之间加入探针。根据天线的辐射原理可知,天线的贴片和接地板相当于两条开路的导线,在导线之间会出现一个零电位。 当在零电位处加上电容与探针之后,就会形成一个驻波分布,从而使天线的尺寸变成了原先的1/2。 短路加载是指把零势面与地面通过短路来进行加载。其中短路加载包括3 种:加载短路探针、加载短路片和加载短路面,如图5 所示。
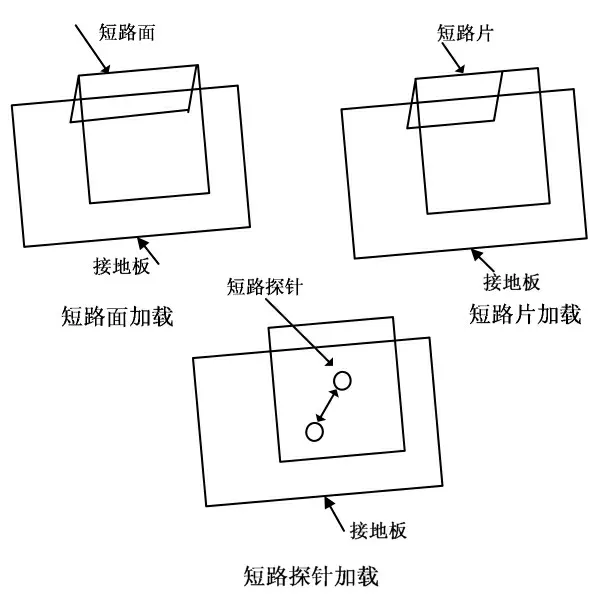
图5 短路加载示意图Figure 5 Schematic diagram of short-circuit loading
文献[6]中利用了加载短路探针的方法之后,能使天线的尺寸缩小为原来的89%,但同时谐振频率也变为原来的大约1/3 左右。
3 一种凹槽型小型化微带天线的设计
3.1 天线结构
在文献[7]中,设计的是一种小型微波探测系统。系统的目的是对移动目标进行探测。其中,对信号的发射和接收是一种工作频率为10.5GHz 的微带天线。 该天线是利用一条传输线进行馈电,没有用到阻抗匹配转换器进行阻抗匹配。来自失配负载和连接处的反射产生的反射波,导致在传输线中损耗的能量较多,同时所携带的电磁场电磁波信号产生了失真, 使得天线的回波损耗|S11|<25.99dB,而且是利用介电常数为4.4,厚度为1.2mm 的FR4 材料作为天线的基片。通过前面介绍微带天线小型化技术可知,选取这样的介质基片不利于天线尺寸的小型化。 文献[8]中提到了一种处在ISM 工作频段的微带天线。 它的工作频率为2.45GHz,频率相对于微波天线的频率来说较低,不利于微带天线的小型化, 同时选用的介质基片是相对介电常数为3.38,厚度为5mm 的RogersR04003 材料。 通过提高介质基片的厚度来提高带宽,但是这样带来的结果是天线的品质因数Q 值降低,辐射效率下降。
借鉴上述文献,本文提出了一种尺寸更小的工作频率为9GHz 的凹槽型微带天线。 采用微波陶瓷介质基片TP-1/2 作为天线的基板来减小天线的尺寸;同时采用凹槽型的特殊形状的辐射贴片,来提高有效电流路径的长度来进一步减小天线的尺寸;利用1/4 波长阻抗匹配转换器对天线进行阻抗匹配, 减小传输线的能量损耗和反射回来的反射波,提高能量的利用效率。
3.2 仿真软件的选定及介绍
对于天线来说,天线的工艺制作需要先通过仿真软件来对天线进行实际模拟,观察仿真过程中天线性能的好坏,然后通过仿真软件确定的结构尺寸对天线实物进行制作。 如果在天线仿真的过程中,出现性能不好和不能满足要求时,可以改变天线的尺寸和结构,直到仿真出性能优良的天线。 目前比较流行的EDA 软件包括CST,HFSS 和ADS 等。
本文选用的HFSS 是利用有限元算法来求解电磁场的仿真器, 主要用于复杂的三维结构的计算。由于有限元算法的复杂性要高于时域有限积分算法的复杂性, 使得CST 处理数据的速度要快于HFSS,CST 所占用的资源要大于HFSS。 但是利用HFSS 仿真三维电磁结构时精度和准确性要远远高于CST。 HFSS 的求解过程如图6 所示。
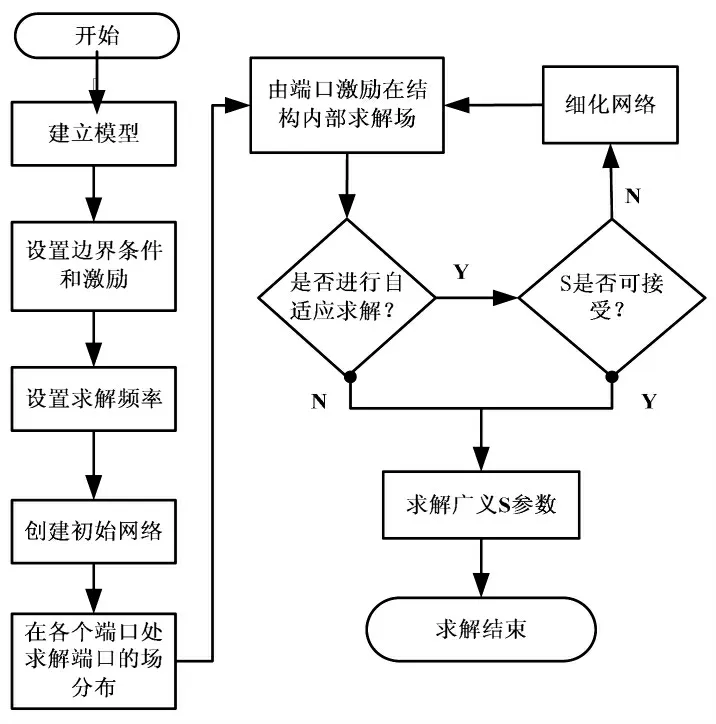
图6 HFSS 求解过程Figure 6 HFSS solution process
3.3 天线频率的选定
本文是通过微带天线来发射和接收信号的。而对于信号,可以通过短波、中波、微波作为天线传播方式。在短波传输信号的过程中利用电离层反射来进行传输。 对于本文而言,探测目标传输的距离只有20m,因此利用微波来传递信号最适宜。 微波是指频率为300MHz 至300GHz 的电磁波。 对于电磁频谱,微波波段按照频率从低到高可以划分为不同的频段。 根据现今通用的由IEEE 建立的微波波段的频谱划分如表1 所示。
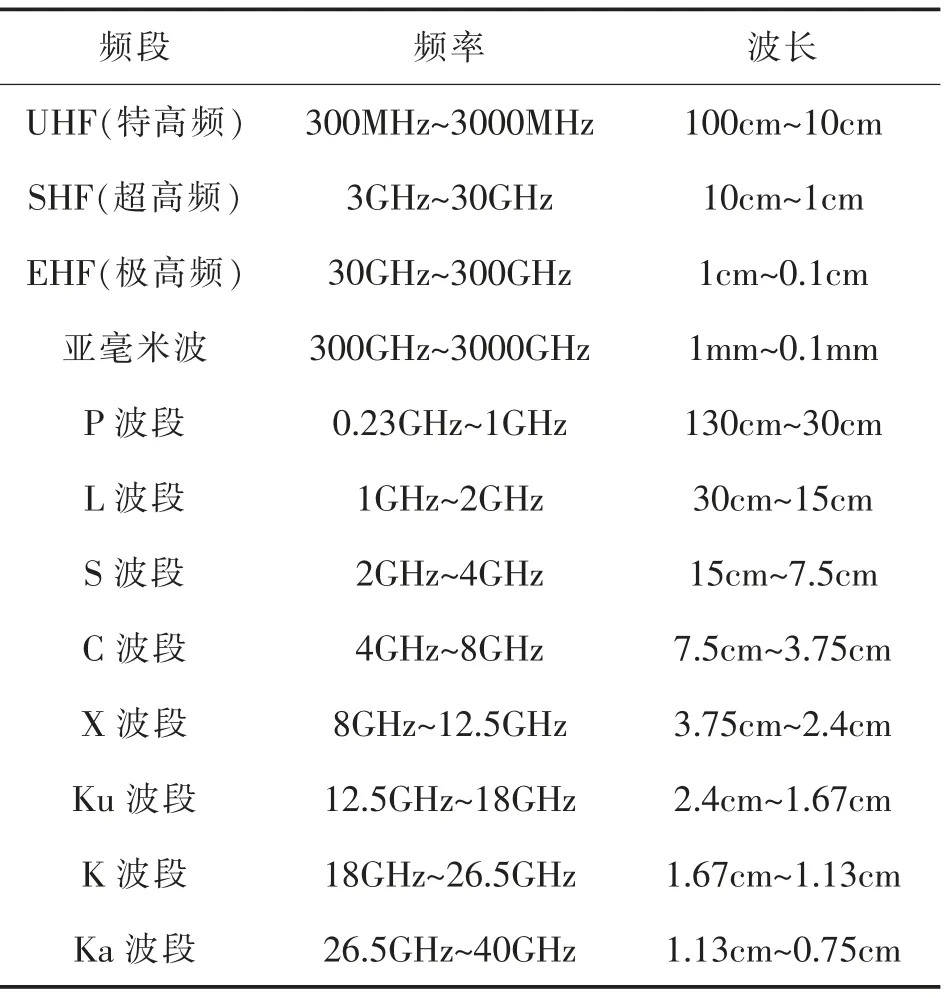
表1 微波波段频谱分布Table 1 Microwave band spectrum distribution
根据表1 中的参考数据, 综合考虑本文需求,选取适中的X 波段的9GHz 作为系统工作波段,也就是天线的工作频率波段。
4 雷达探测系统的设计
本文通过采用介质柱(DR)和高频FET 管组成的介质振荡器为系统提供频率源,采用电容进行直接耦合,并通过前面所设计的微带阵列天线将信号发射出去。当发射出的微波信号遇到目标物体时会被反射回来, 接收天线将反射回来的信号接收之后,送到混频器电路。 混频器采用U 型传输线和二极管组成的反相单平衡混频器,目的是对信号进行降频处理;将降频处理的信号通过滤波电路进行滤波,之后利用16 位CS5509A/D 采样芯片对信号进行采样,利用单片机和数字滤波程序对采样的信号接收和处理,之后通过一个输出接口与数字示波器相连接。 当单片机上的红色LED 灯点亮时,表示在探测范围内有目标物存在,同时示波器上面会出现一个电平脉宽;当单片机上的红色LED 灯不亮时,表示探测范围内没有目标出现,示波器上面波形的电平脉宽会消失。
4.1 A/D 采样芯片的选型
通过接收天线接收的信号是毫伏级的电压,而利用12 位AD 一般无法灵敏地进行探测, 因此本文选择分辨率更高的16 位AD 采样芯片对数据进行采样。
为了精确采集到信号,AD 采样芯片使用Cirrus 公司生产的CS5509。 CS5509 是单电源16 位串行输出的CMOS A/D 转换器。 CS5509 使用电荷平衡技术, 以高达每秒200 个采样的输出字速率,为单片机提供低成本、高分辨率数据测量。 当器件工作在32.768 kHz 时钟(输出字速率= 20SPS)时,片上数字滤波器在50Hz 和60Hz 下提供卓越的线路抑制。CS5509 具有片上自校准电路,可以在任何时间或温度下启动, 以确保最小偏移和满量程误差。低功耗、高分辨率和小封装尺寸使CS5509 成为环路供电发射器、面板仪表、称重秤和电池供电仪器的理想解决方案。如图7 所示是该芯片的内部电路图和引脚图。
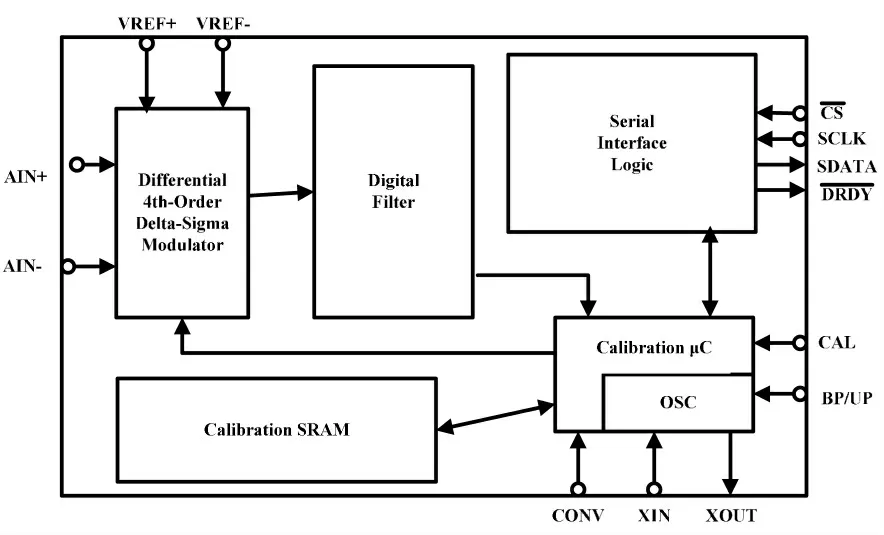
图7 CS5509 引脚功能图Figure 7 CS5509 pin function diagram
CS5509 的A/D 转换器有三种工作状态:待机、校准和转换。 当首次施加电源时, 大约有10ms 的内部上电复位延迟复位器件中的所有逻辑。 然后,振荡器必须在器件被认为可以工作之前开始振荡。上电复位后, 器件在时钟出现后进入1800 个时钟周期的唤醒周期,这是允许三角调制器和其他电路(以非常低的电流操作) 在进入校准或转换状态之前达到稳定的偏置条件。在1800 个唤醒期间内,器件可以接受输入命令,直到完全唤醒周期过去之后才会执行此命令。
4.2 单片机选型
CS5509 芯片输出是一个串行的数字信号,需要经过单片机来对这些串行数据进行数据处理。而对于单片机的选择,应从下面几个方面进行考虑。
第一,单片机的功耗。 在选择单片机的型号时应该尽量选择低功耗的,避免资源的浪费。
第二,单片机的体积。系统应用空间有限,在满足系统功能要求的单片机中应选择引脚较少和体积较小的。
第三, 单片机处理数据的速度。 由于CS5509芯片以高达每秒200 个采样的输出字速率对数据进行处理, 因此在利用单片机接收A/D 采样的数据时,单片机应该以更快的速度接收。
第四,单片机的价格。
综合上面四点因素考虑, 本探测系统采用STM32F407 单片机进行数据采集。
4.3 雷达探测系统的设计
探测系统由硬件部分、软件部分和微带天线三部分构成。下面将对硬件部分和软件部分做详细阐述。硬件部分主要包括介质振荡电路、混频器、滤波电路和电源供电电路。 其中,对于介质振荡电路和混频器电路,可以利用已有文献中的电路来提高系统设计的效率,具体请参考文献[7]。
4.3.1 硬件部分
本文雷达探测系统的硬件设计包括电源供电电路和滤波电路。
(1)电源供电电路
本文利用电池(1.5V×6)给系统供电,不需要考虑电源供电的限制而导致系统应用的局限性;接着利用滤波电路将混频器信号进行滤波, 筛选出2.7kHz 的信号。
电源降压模块, 如图8 所示。 本系统采用TPS54331 将9V 电压降到芯片和单片机供电范围内的电压。
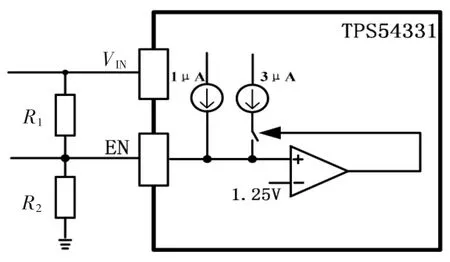
图8 TPS54331 输入欠压锁定图Figure 8 TPS54331 input under voltage lockout diagram
其中V2为输入开始阈值电压,V1为输入停止阈值电压,VEN为使能阈值电压,其值1.25V。
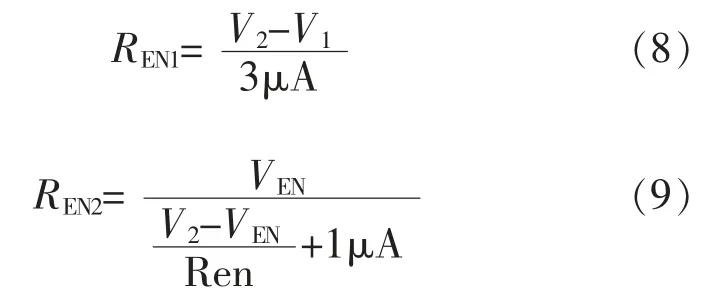
软启动的时间和电容值如式(10)所示,其中:Vref=0.8V,Iss=2μA,Css=27nF。

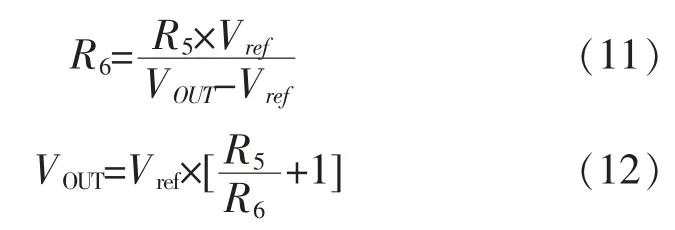
利用电阻分压器网络对该芯片输出电压进行调节。 该分压器网络由R5和R6组成,表达式如下:
TPS54331 使用了II 型补偿方案。 选择补偿分量以设置输出滤波器组件的期望闭环交叉频率和相位裕度。 经计算零极点频率为FZ1=5883Hz,FP1=106200Hz。
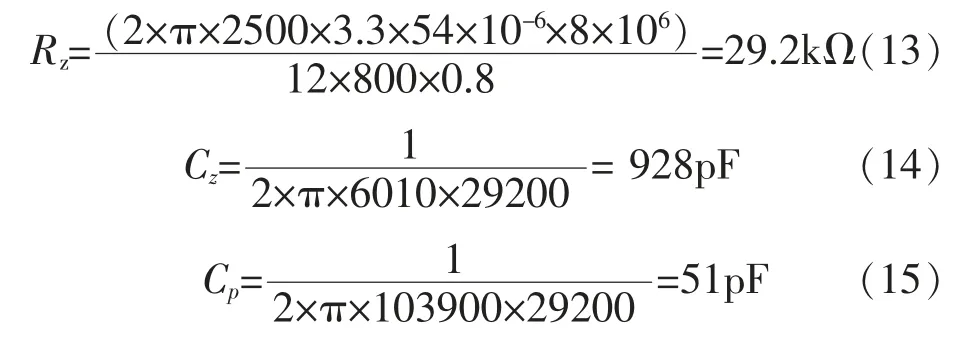
通过上面的计算可以得出实际取值为:R3=29.4kΩ,C6=1000 pF,C7=47pF。 其电源降压电路图如图9 所示。
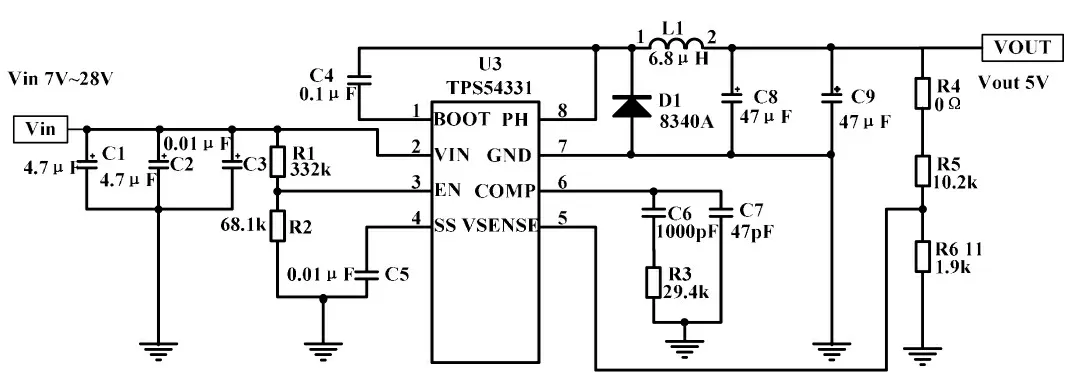
图9 电源降压电路Figure 9 Power step-down circuit
(2)滤波电路
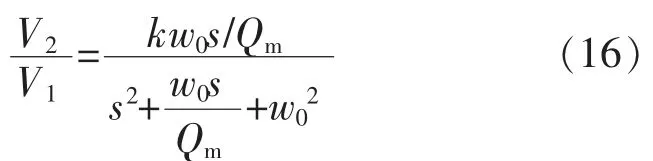
经过混频之后出来很多无用的频率信号,需要对混频的信号进行滤波处理来得到本文所需要的2.7kHz 信号。 目前一般常用的滤波器包括以下三种:切比雪夫滤波器、贝塞尔滤波器和巴特沃斯滤波器。 综合考虑,本系统采用的滤波器为2 级2 阶巴特沃斯滤波器。对于2 阶的带通滤波器的传递函数如式(16)所示,其中,w0为中心角频率,Qm为滤波器品质因,k 为增益,s 为复频率参数。
假设测量的信号的频率为f1~f2,带宽为BW,由此可以得出其中心频率:

中心角频率:

品质系数:

测量信号的频率为200Hz~2.7kHz, 故其带宽为2.5kHz。 通过这些数据和上面的式子可以得出:中心频率f0=1.45kHz,中心角频率w0=4553rad/s,品质因数Qm=1.8212, 滤波器的系数ρ,β 和γ 分别为1.1,0.549 和1。
由于滤波器的Ⅰ级和Ⅱ级电路是两个完全相同的部分,因此只需要确定其中一个的参数就能对信号进行滤波。
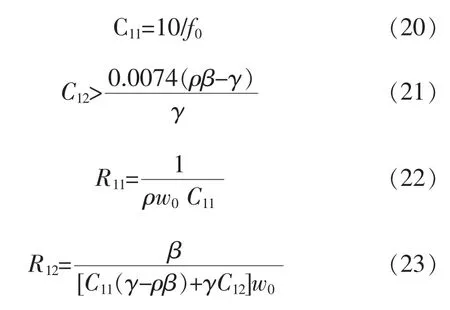
通过上述的一系列分析可以得出如下结果:C11=10nF;C12的 值 要 为 正 数, 故C12=1nF;R11=200kΩ,R12=24.3kΩ,R13=400kΩ,C21=10nF,C22=1nF,R21=200kΩ,R22=24.3kΩ,R23=400kΩ。 其设计的滤波器的电路如图10 所示。
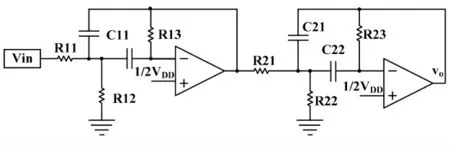
图10 巴特沃斯滤波器电路图Figure 10 Butterworth filter circuit diagram
4.3.2 软件部分
利用STM32 单片机最小系统对A/D 芯片采样的数据进行接收和处理, 将探测采集的电压与设置的门限电压2V 作比较, 因为当系统探测到在没有目标物体时,输出稳出2V 的电压,所以这里选取2V 作为门限电压。 当系统探测到有移动物体的时候,即输出电压超过2V 了,若选取1.5V作为门限电压,则整个系统的稳定性得不到保障,容易因为电路环境因素等原因造成系统误判。 选取2V 作为门限电压, 从而提高整个系统的稳定性。物体距离探测装置越远,物体移动所产生的电压波动值越小,所以门限电压值又不能取值过高。如果取值过高, 系统原本能够探测到远处正在移动的物体,可能因为波动电压值太小,会造成系统的遗漏操作,从而影响系统的精确度和雷达的探测距离。 通过观察示波器的波形图来判断是否有物体移动, 并且在探测采样电压高于2V 时点亮LED 指示灯, 低于2V 时熄灭LED指示灯,以达到探测效果。 单片机软件设计的程序流程如图11 所示。
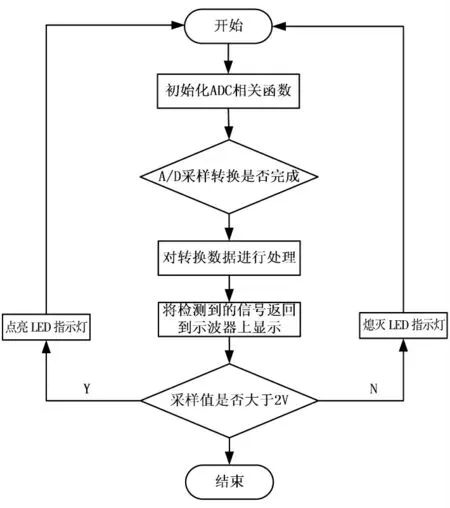
图11 单片机软件设计的程序流程图Figure 11 program flow chart of MCU software design
5 平台搭建与测试分析
通过上面对天线、降压模块、滤波器等一系列的设计之后,需要对整体性能进行测试。 测试分为两部分:系统测试和距离测试。 系统测试主要验证的是系统能否正常工作。搭建平台完毕之后通过观察目标物出现时LED 指示灯是否点亮; 距离测试主要是为了测试设计的雷达探测系统是否能够达到设定的20m 的探测范围。
5.1 系统测试
通过上面的一系列设计,将各个模块利用信号线连接起来。 其搭建的系统如图12 所示。

图12 平台搭建实物图Figure 12 Physical map of platform construction
将系统通电之后,在天线的前方1m 处没有物体移动和有物体移动过程中, 单片机的红色LED指示灯是否点亮作为系统是否正常运行的依据,如图13 所示。
如图13a)所示,在天线1m 的地方没有目标探测物或没有物体移动时, 系统输出2V 的电压,没有超过设置的门限电压, 因此电路中的LED 灯没有亮。 当目标物运动到距离天线1m 的位置或者物体在1m 处保持运动时,由于采集的电压大于门限电压,因此电路中的LED 指示灯变亮。 通过上面的比较说明设计的系统是有效的,同时验证了设计方案的可行性。
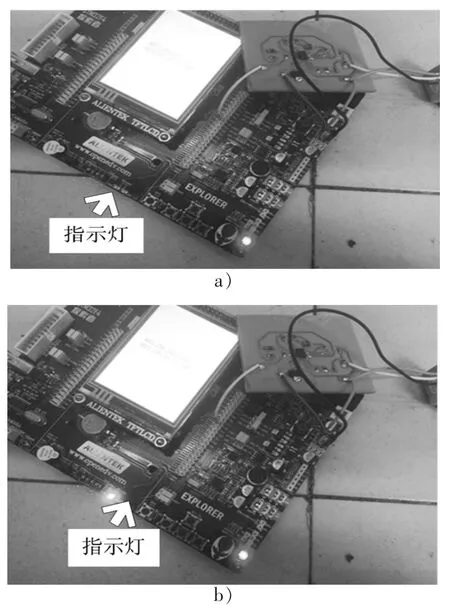
图13 LED 指示灯图示a)指示灯不亮 b)指示灯亮Figure 13 LED indicator diagram
5.2 距离测试
本文设计的系统是需要能够探测到20m 之内的移动目标物,设计的测试方案是在1m 到20m 之间,以1m 为间隔单位进行测试。 如图14 所示,表示的是天线的前方没有目标物体移动时,示波器显示的波形,可以看出出现的信号很密集,在高电平和低电平上都没有脉宽。
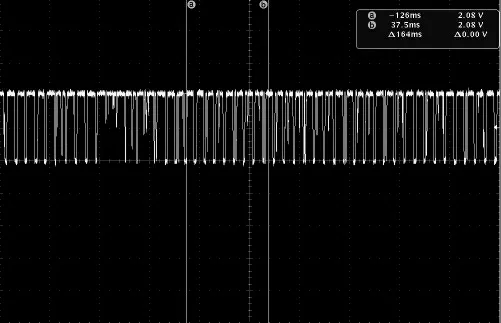
图14 天线前方没有物体时示波器的图形Figure 14 Image of the oscilloscope when there is no object in front of the antenna
目标物体移动到系统的探测范围之内时,示波器的波形发生了突然的变化, 有很多脉宽出现,这说明系统能够探测到目标物体;当目标物移动到距离天线正前方1m 的位置并且在1m 处不断左右移动,示波上显示的波形如图15 所示。
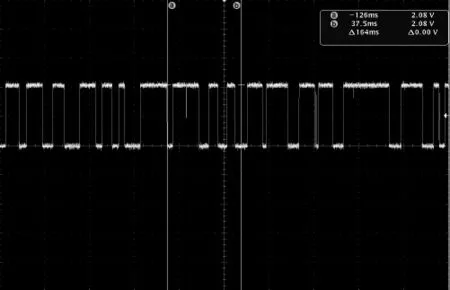
图15 目标物移动到距离天线1m 处时示波器波形图Figure 15 Oscilloscope waveform when the target moves to 1 meter from the antenna
利用相同的方法,目标物体移动到天线正前方的2m 处,并且在2m 处左右徘徊,如图16 所示。与图14 相比,2m 处的波形有一个明显的带宽。 可以看出,系统能够探测到2m 范围内的目标物。
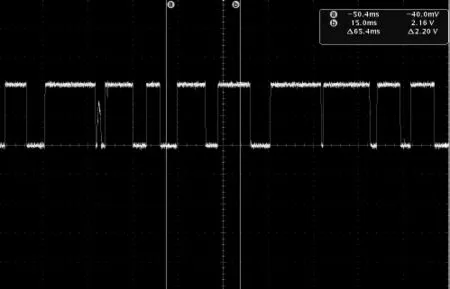
图16 目标物移动到距离天线2m 处示波器波形图Figure 16 Oscilloscope waveform when the target moves to 2 meters from the antenna
与此类推, 目标物体移动到天线正前方的20m处,并且在20m 处左右徘徊,其波形如图17 所示。
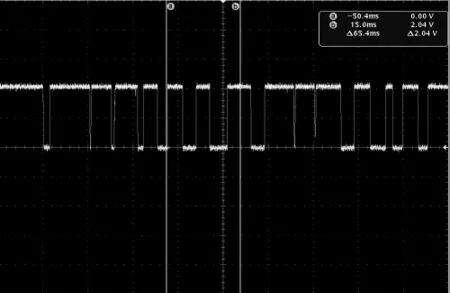
图17 目标物移动到距离天线20m 时示波器波形图Figure 17 Oscilloscope waveform when the target moves to 20 meters from the antenna
为了测出系统探测目标物体的最大距离,目标物体一直向前移动,一直移动到22m 时,也会出现如图17 相类似的波形图。 但当目标物体移动到22m 之后,示波器的波形如图18 所示。 由图可知,系统不能探测到22m 之后的目标。
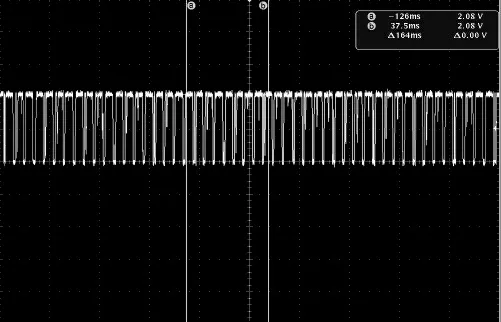
图18 目标物移动到距离天线22m 之后时示波器波形图Figure 18 Oscilloscope waveforms detected by the system after 22 meters
综上可得: 系统的方案和设计具有可行性,能够探测到目标物体, 并且能够达到20m 的探测距离,满足系统设计要求。
6 结语
本文设计的是小型化雷达探测系统,主要目的是探测进入军事管理区域的可疑目标。 首先,设计了一种中心频率f=9GHz 左右的凹槽型小型化微带天线,利用降压芯片设计了电源降压模块以满足单片机的使用, 通过巴特沃斯滤波器对信号进行滤波;然后用STM32 单片机进行数据的采集、处理和校验,最后对整个系统进行了搭建和测试。 通过对20m 之内的移动目标物的测试说明系统的方案和设计具有可行性,且满足设计目标要求。
猜你喜欢
装备制造技术(2021年5期)2021-08-14 01:45:30
电子制作(2019年11期)2019-07-04 00:34:38
东西南北(2019年6期)2019-04-30 04:37:02
电子制作(2018年16期)2018-09-26 03:26:50
小康(2017年34期)2017-12-08 13:32:50
中国交通信息化(2017年10期)2017-06-06 07:13:20
电子制作(2016年1期)2016-11-07 08:42:54
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
学习月刊(2016年19期)2016-07-11 01:59:46
火控雷达技术(2016年2期)2016-02-06 02:29:00