基于地质测绘的三维激光扫描技术分析
2021-03-11 07:36文志波
中国金属通报 2021年20期
文志波,陈 伟
(江西省地质矿产勘查开发局赣西地质调查大队,江西 南昌 330000)
三维激光扫描技术是近年来地质勘查作业领域的热门研究话题,应用此项技术进行地质测绘工作,可以提高测量结果的准确性与时效性。总之,相比常规的地质测绘技术,提出的技术彻底打破了传统技术组织工作的缺陷,并实现了对获取信息的高精度处理。例如,使用此项技术进行调查区域的地形、地貌勘察时发现,扫描仪器可以结合测点细节,进行地质信息的获取,并且数据的扫描速度已超出原有技术的预设速度,最快可达到每秒数万次。基于此项优势,相关地区的地质测绘工作效率越来越高。与此同时,在应用激光技术时,与其匹配的硬件设备也同步更新,此种发展趋势在真正意义上做到了为地质科研人员的现场作业提供支撑。截至目前,相关此项技术的研究已被广泛应用到矿山开采、医疗诊断领域中,但将此项技术应用到地质测绘工作中的研究仍处于空白状态。主要是由于技术在应用过程中,前端会生成大量点云数据,传统测绘方法无法在规定时间内高效率地处理此类数据,使得地质勘查单位的地质测绘工作长期处于一种停滞状态。为了突破传统技术对其的束缚与限制,本文将对基于地质测绘的三维激光扫描技术展开设计与研究[1]。
1 基于地质测绘的三维激光扫描技术
1.1 基于地质测绘的三维坐标系转换
为了确保在地质测绘过程中,三维激光扫描技术应用的有效性,可在进行扫描工作前,对待测绘的地质坐标进行三维转换。通常情况下,扫描设备自身具有一套完善的坐标体系,并默认在执行地质扫描时,原点坐标表示为{0,0,0}。但将三维激光扫描设备应用到地质测绘过程中,便属于将测绘结果置于GIS内,因此,有必要在扫描前,进行坐标系的转换,以此确保扫描结果与地质结果具有一定适配性。例如,在露天地质测绘过程中,需要确定扫描过程中全站仪在空间内的位置,在此基础上,将仪器与GPS定位设备进行对接。开启设备后,需要先进行地质目标的获取(通常情况下,对应目标为5~8个),在确定目标后,再使用三维激光设备对目标周围地质进行大规模扫描。此时,前端获取的数据不仅包括激光扫描数据,同时也涵盖一定数量的目标数据,要满足地质测绘需求,应将前端现有数据进行坐标匹配。为此,基于坐标轴转换法,进行数据矩阵的转换,此过程可用下述计算公式表示:

公式(1)中:1X、1Y与1Z分别表示为转换后三维坐标系对应的空间坐标点,其中X与Y在空间中对应正北方向与正东方向;X0、Y0与分别表示为三维激光扫描设备在进行测绘地质扫描过程中,自身的坐标系对应点坐标;s表示为对应的测绘比例,也可将其认定为空间扫描放大系数,当对应的两个坐标体系量纲呈现对等状态时,此时可定义s=1.0;xW、yW与zW分别表示为坐标点在空间中的平移长度;R表示为空间旋转坐标转换矩阵;1a、2a与3a分别表示为扫描测绘点,通常情况下为最少3.0个测绘点,根据实际情况,可适当增加测点。
在完成对空间点坐标的基础转换后,结合GPS-RTK技术,进行特征点放大点坐标的获取,并在区域卫星条件允许的前提下,对每个转换点进行卫星坐标校正(当GPS接收点测量可精确到具体位置或受到3个以上卫星的同步定位时,可认为此时的卫星条件符合标准)。按照上述计算公式(1)进行所有测点坐标的三维转换,将完成转换后的坐标导入地质测绘坐标体系内,以此完成本章的研究。
1.2 三维地质激光扫描数据收集
在完成上述工作后,进行三维激光扫描数据的获取,在此过程中,为了确保获取的数据具有较高的通视条件,可在扫描过程中,在待测绘的地质区域内增设3个通视范围在90.0°~120.0°的观测桩。在观测桩上架设扫描设备,将此设备与终端GPS设备建立通信联系。
考虑到收集的激光扫描数据需要被导入一个统一的维度,因此,需要在此过程中确保观测桩结构的稳定性。在此基础上,使用在其上端集成的定向标志进行获取数据参数的整平,整平的参数需要涵盖激光扫描密度与激光有效扫描范围等,通过此种方式,便可以实现对初期地质测绘数据的收集。
1.3 三维激光点云数据匹配
上文收集的激光扫描数据在地质测绘空间内属于点云数据,此种数据是扫描设备对地质结构扫描后形成的单个扫描点集合,对应的每个点坐标均含有三维坐标轴,也均可以作为地质结构、地层物理性质的评估依据。但仅根据此部分数据进行地质测绘结果的描述,会使描述结果受到点坐标光照强度与反射颜色的影响,甚至会由于计算机成像导致被测物体存在分辨不清的问题。因此,需要对收集的点云数据进行地质测绘三维空间匹配。通常情况下,此过程中需要辅助使用计算机设备进行,具体操作步骤如下。
第一步为“编辑”点云数据集合,此操作步骤的目的是消除数据中的显著异常差值,或裁剪部分与地质测绘区域建模无关的冗余数据。第二步为“配准后拼接”,在不同观测桩上寻找收集数据集合中的公共坐标点,根据公共点对应的空间位置,进行地质测绘中心点的定位。在完成对中心点的确定后,在数据集合中删除重复的点云数据,确保集成所有数据后,点云数据集合可以成为一个整体。同时,也可以结合观测桩的测绘方向,进行点云数据的旋转,确保所有数据在一个统一直角坐标体系内。第三步为“建模”,将所有坐标系内的点云数据与测绘地质空间内的物体进行对接,构建一个三维扫描模型。模型中不仅包含地质信息,同时也包含实体信息。在此基础上,将所有信息进行计算机的集中导入,以此完成三维激光扫描技术的分析。
2 实例应用分析
选择将某矿山工程建设项目作为依托,针对该项目的矿山地质勘察工作,引入本文提出的基于地质测绘的三维激光扫描技术,一方面为了验证该技术的可行性,另一方面为了验证该技术的扫描效果。在具体作业过程中,利用三维激光扫描仪及高精度定位装置对其地质条件进行快速测量,在勘察区域设置4个测量站,并保证每天勘察过程中的外业工作时间控制在2小时左右。在该研究区域当中,设置5个不同的测点,并通过高精度定位装置对五个测点的坐标进行测量,并记录如表1所示。
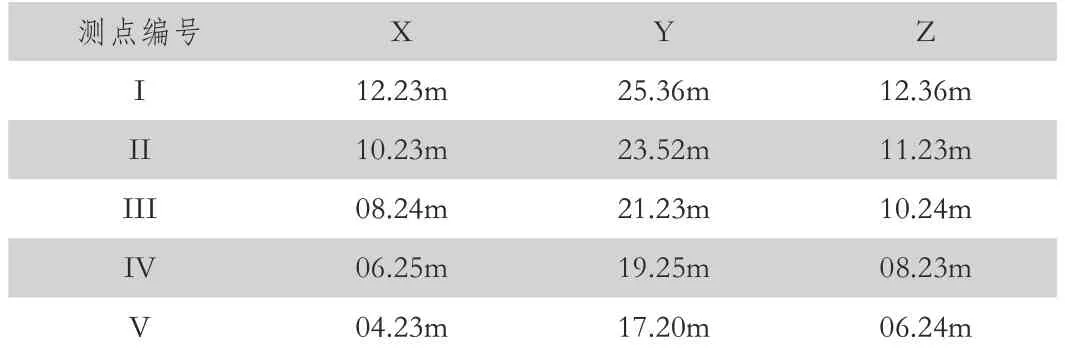
表1 研究区域五个测点定位坐标
表1中X表示为测点水平方向坐标;Y表示为测点竖直方向坐标;Z表示为测点空间坐标。在表1研究区域五个测点定位坐标数据的基础上,利用本文扫描技术对该区进行扫描,并将上述五个测点在扫描图像当中标记。比较五个测点在各个方向上的差异量,差异量表示为测点实际定位坐标与扫描生成的图像之间的误差。差异量的计算公式为:差异量=测点实际定位坐标-生成扫描图像上测点坐标。将计算结果记录,并绘制成图1所示。

图1 三维激光扫描结果差异量变化图
图1中x表示为水平方向测点差异量;y表示为竖直方向测点差异量;z表示为空间方向测点差异量。从图1得出的差异量变化结果可以看出,最小差异量出现在测点V,数值为0.26mm,最大差异量出现在测点III,数值为2.67mm,扫描后生成图像中各个测点在三个方向上产生的差异量均未超过3.0mm,具有较高的扫描精度。因此,通过实验证明,本文基于地质测绘提出的三维激光扫描技术在应用到真实的地质勘察工作当中,能够实现对被勘察区域各项勘察信息的精准扫描,同时也进一步证明了地质测绘在矿山地质勘察扫描当中的可行性,为扫描技术的合理实施提供更加有利的基础条件[2-4]。
3 结语
三维激光扫描技术在实际应用中,具有较强的灵活性与较高的准确性,但相关方面的研究大多局限在理论阶段,为了实现此项技术的广泛应用,本文开展了基于地质测绘的三维激光扫描技术研究,并在完成研究后,通过实例应用的方式,对此项技术的功能进行了检验,证明三维激光扫描技术具有较强的实用性。总之,本文此次的研究,在真正意义上实现了地质测绘工作的突破,为地质勘探、矿山找矿等工作的实施,给予了足够的技术支撑。但要真正将此项技术在市场内推广,还需要加大对扫描过程中影响因素的综合判断与分析,只有解决了扫描过程中对其行为造成负面干预的因素,才能确保扫描结果具有更高的成像价值。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
建材发展导向(2021年22期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
昆明医科大学学报(2021年6期)2021-07-31
汽车实用技术(2021年10期)2021-06-04
天津城建大学学报(2020年4期)2020-09-10
热带农业科学(2020年1期)2020-03-21
——以徐州高层小区为例
建筑技艺(2019年9期)2019-11-27
建材发展导向(2019年10期)2019-08-24
电子制作(2018年12期)2018-08-01