跟航模式下北极冰区船舶安全间距研究
2021-03-10 13:27:26李振福张浩轩刘依源代明鹤
中国航海 2021年3期
李振福, 张浩轩, 刘依源, 代明鹤
(1. 大连海事大学交通运输工程学院, 辽宁 大连 116026;2. 大连海事大学综合交通运输协同创新中心, 辽宁 大连 116026)
北极冰区的航行环境十分恶劣,特别是当船舶航行在重冰区海域时,需要破冰船通过破除航道中的浮冰来辅助船舶航行,船舶往往以船队的形式跟航,且要充分把握船舶在冰区特殊环境下与前船的距离,做好恶劣环境下的风险评估。在实际的极地航行中,风险评判往往需要驾驶员凭借经验进行分析与估计,这样会增大船舶在行驶过程中的碰撞风险。北极冰区航行的船舶以单船或船队的形式在破冰船后进行跟航,后船无法追越前船,这与城市道路交通中的单一车道相类似。道路交通中研究避免前后车辆碰撞的模型较多,其中最典型的就是利用跟驰理论进行分析。
跟驰理论最早应用在道路交通研究领域,是运用动力学方法探求车辆队列在无法超车的单一车道上行驶时,后车跟随前车的行驶状态,研究相邻两车间的相互作用,并用数学模式加以分析阐明的一种理论。Reuschel和Pipes首先从运动学的角度对相互移位的中途车流进行动力学分析[1-2]。Gazis等进一步讨论了各种非线性的交通流量跟踪模型[3]。Gipps构造一种新的跟驰车辆响应新模型,用以体现交通流的真实情况[4]。曲大义等认为前导车和道路环境等因素会影响车辆跟驰行为,将车辆抽象成相互作用的分子,并基于分子动力学理论构建相互作用势函数,建立出基于该函数的分子跟驰模型[5]。
不可否认,海上交通与城市道路交通存在不同。其一,相较于车辆来说,由于船舶庞大的结构,其操纵性和制动性均不及汽车,在海上航行所受到的影响因素也较多,如风、浪、水流、雾等,考虑的情况较为复杂。其二,除安全方面外,对于海上运输来说,其更注重经济性,考虑如何减少运营的成本来增加收益,对于陆上交通来说,更注重时间性,考虑如何将乘客快速地运送到目的地。而随着海上交通的复杂化和密集化,越来越多的学者将跟驰理论应用到海上交通。朱俊等人运用了最优化理论和非线性跟驰理论,通过建立船头间距与船舶速度之间的函数关系,从微观角度构建出了航道通过能力的计算模型[6]。何良德等人根据船舶制动原理,分析船舶制动距离与船长、船速的相关性,给出了制动距离的经验公式,构建关于内河船舶的跟驰间距模型[7]。而由于北极冰区环境的特殊性,船舶需要在破冰船的护航操作下进行跟随航行。船舶进入冰区后,需跟随在破冰船的后方,在其开辟的尾迹中航行。为了保证船舶可以在北极覆冰水域安全航行,张明阳等人提出了护航船与被护航船之间安全距离和碰撞风险的计算模型[8]。李振福等人在冰上丝绸之路的背景下研究了北极航线船舶安全通航问题,基于陆上交通流跟驰模型,建立了适用于北极航线的船舶跟驰模型[9]。
由于在船舶航行安全方面,关于北极冰区航行的船舶安全间距研究较少,故为了拓展北极冰区航行安全方面的研究,本文通过对船舶在冰区航行受到的阻力和船舶制动距离的分析,并结合“永盛轮”在冰区的实际航行情况,将计算出的船舶安全间距与实际数据进行对比分析,从而验证计算结果的合理性,可以为其它船舶在北极冰区的安全航行提供一定的参考。
1 北极冰区船舶安全间距
北极冰区一般可分成浮冰区和陆缘冰区两种情况。传统破冰船都会采用连续破冰和冲撞破冰两种方式。连续式破冰适用于冰面强度小、厚度薄的海域。如果冰层较厚,超过了破冰船设计时的最大破冰厚度或者在较为复杂的堆积冰、厚冰区及更严峻的冰脊区等冰区中时,则采用冲撞破冰法。本文针对浮冰区来进行研究,并选择对连续式破冰方法下的船舶安全间距进行计算。因北极冰区环境的特殊性,为确保船舶跟航时的航行安全,本文结合停船视距理论[10],计算出跟航模式下的北极冰区船舶安全间距。
当船舶进入冰区时,需要借助破冰船辅助破冰才能继续航行。在冰情较为严重的情况下,船舶需紧紧跟随破冰船,在其开辟的尾迹中航行,否则通道很快会被大量碎冰堵塞而使后船无法安全航行。而在冰区紧跟破冰船行驶时,两船距离较近,虽然船舶航速较低,但仍存在很大的船舶碰撞危险。其中最为危险的情况就是当破冰船出现“撞墙式”停船(假设船舶即刻停下,无制动距离)时,后船需通过及时制动让船舶停下,以此来避免与前船发生碰撞。
在航行过程中,一般可通过两种制动方式让船舶停下。一种方式为正常制动,也称停船制动,船舶完全依靠航行阻力来降低航速。另一种方式为倒车制动,也称为紧急制动,当船舶遇到紧迫危险需要紧急停船时,就要采取倒车的方式使其快速停下。倒车冲程也称紧急停船距离或最短停船距离。本文将通过考虑两种制动方式来确定船舶的制动距离。
1)正常制动
忽略螺旋桨阻力,船舶正常制动时,其运动微分方程[7,9,11-12]为:
(ms+mx)·a=R
(1)
(2)
mx=0.07ms
(3)
式中,ms、mx分别为船舶总质量和附加水质量,kg;a为船舶加速度,m/s2;R为船舶航行阻力,N。
2)倒车制动
忽略螺旋桨阻力,船舶倒车制动时,其运动微分方程[7,9]为:
(ms+mx)·a=-Tp-R
(4)
式中,Tp为船舶倒车拉力,N。
在冰区航行时,最危险的情况就是破冰船或前船由于特殊情况突然停船。所以在此种情况下,假设前船突然停船,船头间距由船长L及停船视距S组成,船头间距为后船船艉到前船船艉的距离。而停船视距S即为文中的船舶安全间距dsafe,由船舶安全余量Sm、反应距离Sr及后船制动距离Sb组成。故此时船头间距和船舶安全间距为:
d=dsafe+L
(5)
dsafe=Sm+Sr+Sb
(6)
Sr=Vtr
(7)
其中,船舶安全余量Sm取0.25倍船长[10];后船驾驶员从发现前船的运行态势并下达命令到主机开始制动的时间为tr(其中包括驾驶员的反应时间τ(0.5-1.5 s)及其动作时间(0.7-1.0 s),还有从下令到主机实际制动的时间θ(4-6 s))[7],平均可取tr为7 s;V为船舶航速,m/s。
2 冰区安全速度与船舶制动距离计算
2.1 冰区安全速度
本文选用了AIRSS (Arctic Ice Regime Shipping System)系统并结合北极冰区的海冰情况进行分析,通过其提供的数据对船舶在冰区的安全速度进行计算。AIRSS框架已经确定了多种类型冰的冰况,通过冰的厚度所归类的冰乘数(Ice multipliers)数值,并根据相应的准则来对冰的类型进行分类。AIRSS所确定的六种冰的类型情况如下:灰冰(10~15 cm)、灰白冰(15~30 cm)、第1阶段薄当年冰(30~50 cm)、第2阶段薄当年冰(50~70 cm)、中等厚度当年冰(70~120 cm)、厚当年冰(大于120 cm)。冰乘数IM基于冰的类型与船舶相应的类别,数值为非零整数,范围为-4到2之间,数值越大,对应的风险越低[8]。冰乘数数据如下表1所示。
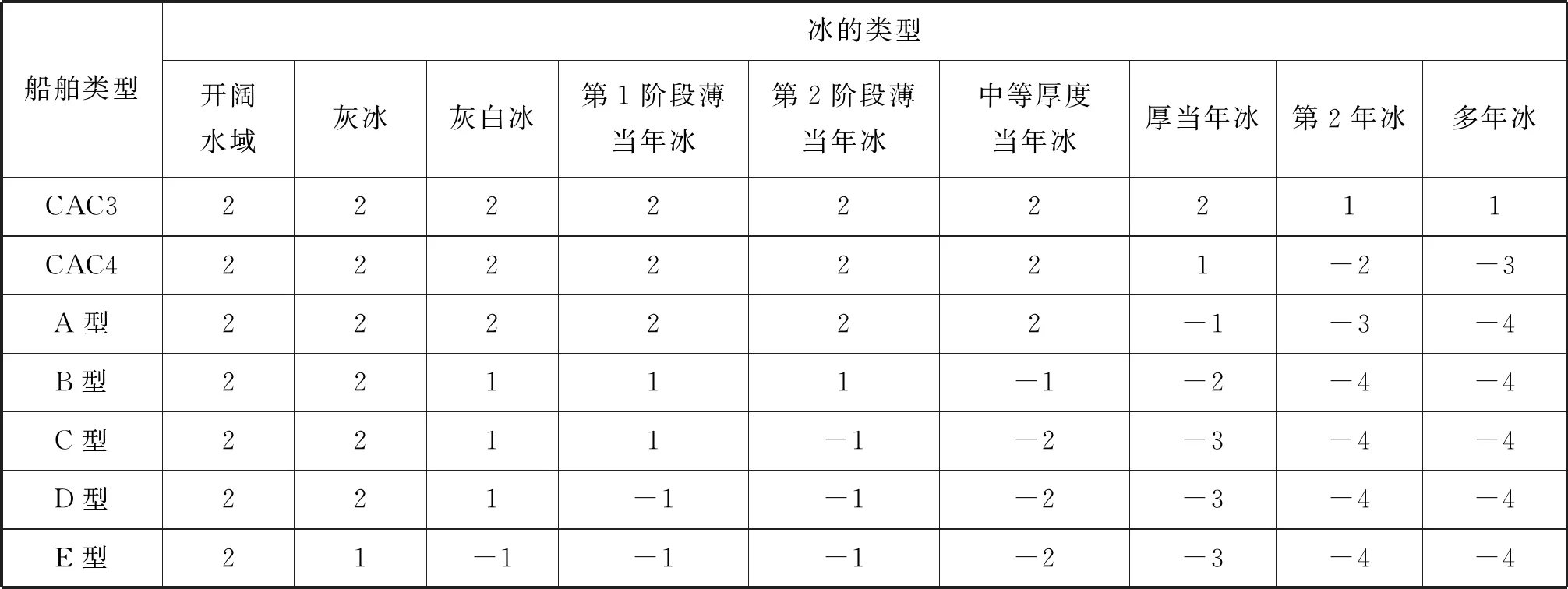
表1 北极区域冰乘数
船舶在覆冰水域航行时,需要尽量小于这个最大安全速度来行驶,不能过快,以保证船舶安全。在模拟情况下,安全速度也由AIRSS引导,而在实际应用中,船舶类型和结冰条件是影响安全速度的主要因素。根据AIRSS的标准,船在覆冰水域中安全航行的能力由IN(Ice Numeral)来表示[8]:
IN=Ca·IMa+Cb·IMb+…+Cn·IMn
(8)
其中,Ca是a类海冰的海冰密集度;IMa是针对某一船舶在a类海冰的冰乘数,以此类推。根据海冰数值计算船舶在特定冰况环境下的安全速度,计算公式为[8]:
V=0.002 7·(IN)3+0.039 8·(IN)2+0.248 9·(IN)+3.838 5
(9)
其中,V指船舶在不同冰况下的安全速度,m/s。
2.2 船舶航行阻力
1)风荷载
作用于船舶上的风荷载可参照《JTS144-1—2010港口工程荷载规范》[13]计算,作用在船舶上的风压力为:

(10)
式中:F风为船舶风荷载,N;Aw为船体水面以上纵向受风面积,m2;V风为风速,m/s;ζ1为风压不均匀折减系数;ζ2为风压高度变化修正系数。
水面以上受风面积主要由船舶外形尺度及甲板上的货物、驾驶室因素等决定,一般难以准确计算。我国现行水运行业规范采用日本学者高桥宏直于1998年的成果,该成果基于船舶资料绘制出了载重量(DWT)或总吨(GT)与受风面积的统计曲线并进行回归分析,通过拟合形成计算受风面积的回归曲线,故文中采用其对数回归表达公式[14]:
lgY=α+βlgX
(11)
式中,Y为船舶水面以上的受风面积;X为船舶载重量(DWT)或总吨(GT);α与β为回归系数。受风面积与载重量或总吨的关系见表2。

表2 各船舶参数所对应的回归系数α与β
2)水流阻力
水流阻力参照《港口工程荷载规范》计算,其表达式为[10,13,15]:
F水=kV2
(12)

Cb·L·B)
(13)
(14)
(15)
式中:F水为水流阻力,N;V为船舶航速,m/s;k为水流阻力系数;ρ是海水密度,kg/m3;Re是水流对船舶作用的雷诺系数;b是系数;L是船舶长度,m;D是船舶吃水,m;B是船舶宽度,m;Cb是船舶方形系数;V水为水流速度,m/s;η是海水的粘性系数;V排水为船舶排水体积,m3。
3)碎冰阻力
Colbourne认为碎冰阻力与速度有平方的关系,且碎冰阻力和碎冰密集度有n次幂的关系,针对不同船型,n的取值不同[16]。最终发现,n=2时最符合冰区船舶行驶在碎冰区域的实际情况,结果误差也最小,因此本文n取2。碎冰阻力的估算公式为[17]:
F冰=CPρiBhiV2C2
(16)
(17)
(18)
其中,Rp为碎冰阻力,N;V为船舶速度,m/s;Frp为冰傅汝德数;ρi为冰的密度,文中取890kg/m3;g为重力加速度,取10m/s2;B为船舶宽度,m;hi为海冰厚度,m;C为海冰密集度。
2.3 船舶制动距离
船舶在北极航道航行时所受到的阻力大小并非是不变的,而是会随着航速的变化而改变。船舶在制动过程中作变减速运动,所求加速度随速度的减小而变化。故结合式(1)~(4)以及式(10)~(18),根据船舶正常制动和倒车制动两种情况,可分别得到船舶制动加速度的表达式:
(19)

(20)
式中,a正为船舶正常制动时的加速度,m/s2;a倒为船舶倒车制动时的加速度,m/s2;Tp是船舶倒车拉力,N;F风是风阻力,N;F水是水流阻力,N;F冰是碎冰阻力,N。
在计算船舶倒车拉力时,不能简单地用主机功率来计算倒车拉力,因为船舶进行倒车时主机功率并不能完全发挥,一般存在一个推进系数,具体如下[18]:
(21)
式中,P.C为推进系数;Pe为有效功率;Ps为船舶主机功率。船舶的推进系数一般为0.5~0.7,文中取0.5。大多数船舶主机为柴油机,柴油机有效倒车功率与有效正车功率存在确定的比值,一般取85%。故船舶在倒车制动时的倒车拉力Tp为:
(22)

(23)
将公式(19)和(20)带入式(23)中可得
① 正常制动时的船舶制动距离:
(24)
② 倒车制动时的船舶制动距离:
(25)
3 实证分析
本文根据船舶实际航行情况进行实证分析,选择“永盛轮”2013年8月28日至9月2日的航程作为研究对象。
3.1 实际航行情况
“永盛”轮为多用途普通干货船,主机额定功率为7 860 kW,设计航速为14 kn,型长、型宽、型深分别为160 m、23.7 m、11.95 m,船舶类型为A类。该航次船舶吃水8.6 m,船舶载重吨(DWT)为19 561 t,排水量为26 216 t。“永盛”轮在东西伯利亚海、维利基茨基海峡和喀拉海遭遇浮冰影响,其余海域均无冰,船舶在冰区航行的大致情况如下:
(1) 2013年8月28日,“永盛”轮在穿过白令海峡驶过楚科奇海后航行至德朗海峡,破冰船“50 LET POBEDY”即“50年胜利号”从70°00.6′N/176°22.6′E处开始护航。
(2) 8月28日至30日通过东西伯利亚海,气压为1 012~1 023 hPa,西北风3级,水流流速为0.9 kn,流向为南;8月30日进入低压区,风转为西南风3级,水流流速为0.3 kn,水流流向为西南。
(3) 8月28日,在东西伯利亚海(70°29.9′N/171°05.7′E至71°51.2′N/168°00.9′E)第一次进入冰区,分布着密集度40%的灰冰(Grey Ice,冰层厚度10~15 cm)和10%的灰白冰(Grey-White Ice,冰层厚度15~30 cm)。
(4) 8月30日,第二次进入冰区依旧在东西伯利亚海(72°08.7′N/161°49.1′E至73°37.4′N/156°47.4′E),分布着密集度30%的灰冰(冰层厚度10~15 cm)和30%的灰白冰(冰层厚度15~30 cm)。
(5) 9月1日,在维利基茨基海峡西侧与喀拉海相连处(77°37.7′N/108′47.5′E至77°34.2′N/94°05.2′E)第三次进入冰区,分布着密集度40%的中等厚度当年冰(First-Year Medium Ice,冰层厚度70~120 cm)和50%的第二阶段薄当年冰(Thin First-Year Ice Second Stage,冰层厚度50~70 cm),该区域多为西北风,风力3级左右,水流流速约为1.3 kn,水流流向为南。
(6) 9月2日,破冰船在喀拉海域于77°28.3′N/088°40.6′E处结束护航。
3.2 结果分析
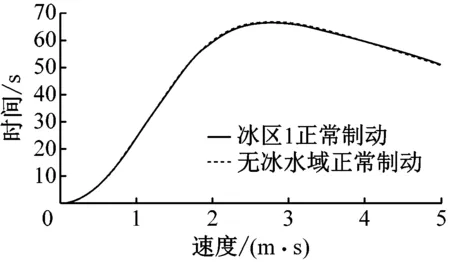
根据“永盛轮”船舶参数与其实际的冰区航行情况,结合上述公式,对船舶制动情况进行对比分析,如图1和图2所示。并将各冰区航行的船头间距和船舶安全间距与实际航行中“永盛轮”和破冰船“50 LET POBEDY”的最近距离进行汇总,如表3所示。具体内容如下:
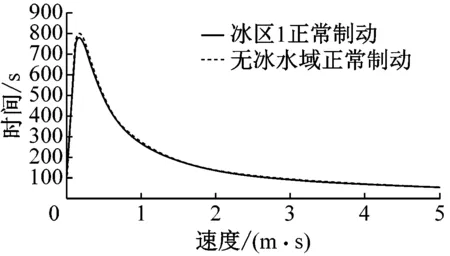
(a)冰区1与无冰水域
(a)冰区1与无冰水域

表3 船舶安全间距与实际航行距离
根据“永盛轮”实际航行情况可知,冰区3的冰情最为严重。由图1和图2可知,无论船舶采取正常制动还是倒车制动,在冰区1和冰区2与无冰水域的制动情况几乎相同,说明在冰情不严重的情况下,海冰对船舶制动过程产生的影响并不大,而由于冰区3的冰情较为严重,船舶在冰区的制动距离明显小于无冰水域的制动距离,船舶制动情况相差较大。
如表3所示,随着冰情严重程度的增加,前后船之间的船舶安全间距都呈减小的趋势。根据“永盛轮”实际航行情况,得出的经验是在稀疏冰区航行船舶安全间距保持4链左右[19],约740m,且“永盛轮”实际航行最近距离均在两种制动情况下的安全间距范围内,本文计算结果具有一定的合理性。在冰区3中,实际最近距离与船舶倒车制动下的安全间距相接近,这说明如果破冰船遇到紧急情况突然停船,后船则必须采取倒车制动的措施才能使得两船不相撞。在实际航行中,破冰船一般都具有较好的操纵性,能在很短的时间内将自身的速度提升到14节左右。所以一般情况下,跟航模式下的船舶避碰主要从后船及时停船制动和破冰船及时提速两个方面来实施,这样可以降低操作难度,提升安全性。本文考虑了前船可能会发生最为紧急的状况,所以后船在冰区中可根据实际航行情况适当地缩短正常制动下的船舶安全间距。当只有发生非常紧急的情况时,后船才需要使用倒车制动。
4 结论
本文结合北极冰区的航行环境,计算出跟航模式下北极冰区的船舶安全间距,并通过“永盛轮”的实际航行情况进行了分析和验证,得出以下结论:
1)在冰情不严重的情况下,船舶在冰区和无冰水域的制动情况基本一样,而在冰情较为严重时,海冰对船舶的航行影响较大,冰区和无冰水域的船舶制动情况有明显差异。
2)除船舶自身影响因素外,不同冰区的海冰分布情况也影响着后船与破冰船的船舶安全间距,冰情越严重,船舶安全间距越小。
3)在冰情严重的情况下,后船需要以较近的距离跟随破冰船航行。若破冰船发生紧急情况突然停船,后船必须采取倒车制动才能使两船不相撞。但在实际航行中,破冰船可以短时间内提速,加大与后船的距离,故前后船避碰主要从后船及时制动和破冰船及时提速两方面来实施,此时后船一般不需要进行倒车制动。
猜你喜欢
科学24小时(2023年10期)2023-10-15 01:22:24
珠江水运(2023年3期)2023-03-04 16:28:28
吉林电力(2022年1期)2022-11-10 09:20:48
能源工程(2022年2期)2022-05-23 13:51:44
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
小学科学(学生版)(2021年2期)2021-03-29 07:33:48
舰船科学技术(2021年12期)2021-03-29 01:28:02
动漫星空(兴趣百科)(2019年5期)2019-05-11 02:13:52
航空世界(2018年12期)2018-07-16 08:34:34
中学生英语(2017年6期)2017-07-31 21:28:55