
基于改进型ADRC的全驱动AUV建模与仿真
2021-03-10 07:59:20王俊雄牛啸辰
水下无人系统学报 2021年1期
王 震, 王俊雄, 牛啸辰, 苏 伟
基于改进型ADRC的全驱动AUV建模与仿真
王 震, 王俊雄, 牛啸辰, 苏 伟
(上海交通大学 船舶海洋工程国家重点实验室, 上海, 200240)
自主水下航行器(AUV)具有非线性、强耦合且易受外界干扰等特点。为进一步提高AUV的控制精度, 文中首先对六自由度全驱动AUV进行了建模, 并搭建了相应的比例-积分-微分(PID)控制器和自抗扰控制器(ADRC), 对比分析可知, 传统ADRC待调整参数过多且跟踪微分器(TD)环节速度较慢。针对此, 采用Asin函数对传统ADRC的各环节进行了简化, 改进了TD的结构, 并在相同仿真条件下对PID控制器及改进型ADRC控制器的控制效果进行了仿真。结果表明, 在对多自由度运动系统进行控制时, 改进型ADRC相较于PID的控制精度更高, 抗干扰能力也更强。
自主水下航行器; 自抗扰控制器; 比例-积分-微分控制; 路径跟踪
0 引言
近年来, 水下机器人被越来越广泛的关注和应用。其中, 自主水下航行器(autonomous under- sea vehicle, AUV)因不需要人工干预就可以自行在海底作业, 无论在军事领域(监视、侦察、检查、排雷)还是民用领域(海底测绘、石油工业、渔业)都有着非常高的应用价值。由于AUV系统有着多变量、非线性及强耦合等特点, 实际工作中还会受到来自不同方向的水流、旋涡等因素干扰, 因此设计高抗干扰能力的AUV是其水下稳定工作的关键。
目前, 国内外学者多采用比例-积分-微分(pr- oportional integral derivative, PID)控制、滑模结构控制、模糊自适应控制及神经网络控制等方法进行AUV动态控制研究, 其中PID控制器占据AUV控制的主导地位。但由于差分方法在提取微分信号时对噪声十分敏感, 因此在很多场景下PID退化为PI控制, 通常控制器的响应速度慢且误差较大[1]。此外, 在处理多自由度相互耦合的系统时, PID控制器往往力不从心, 难以实现较好的控制效果。自抗扰控制(active disturbance rej- ection control, ADRC)方法另辟蹊径, 在控制多自由度问题时可以将其他通道对当前通道的干扰通过扩张状态观测器观测出来, 在解决多自由度耦合问题上有着天然的优势。
文中基于澳洲国立大学给出的Kambara水下机器人模型相关参数, 在Simulink下搭建了其六自由度(6 degree of freedom, 6-DOF)工作模型, 并采用反双曲正弦函数构建了改进型ADRC控制器, 同时为进一步提高控制精度, 对传统跟踪微分器的结构进行了进一步优化; 接着对模型施加正弦扰动并通过螺旋线仿真试验比较了改进型自抗扰、传统PID 2种控制策略在有干扰情况下的控制效果。
1 控制对象建模
1.1 运动学建模

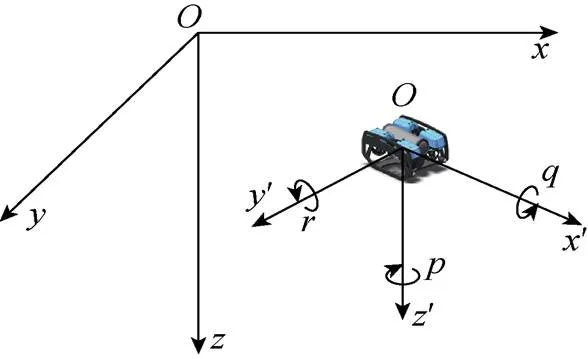
图1 地球坐标系和载体坐标系
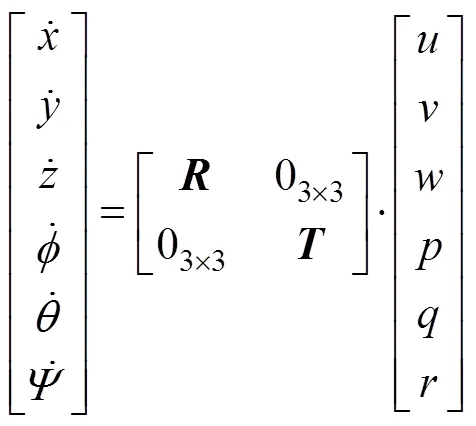
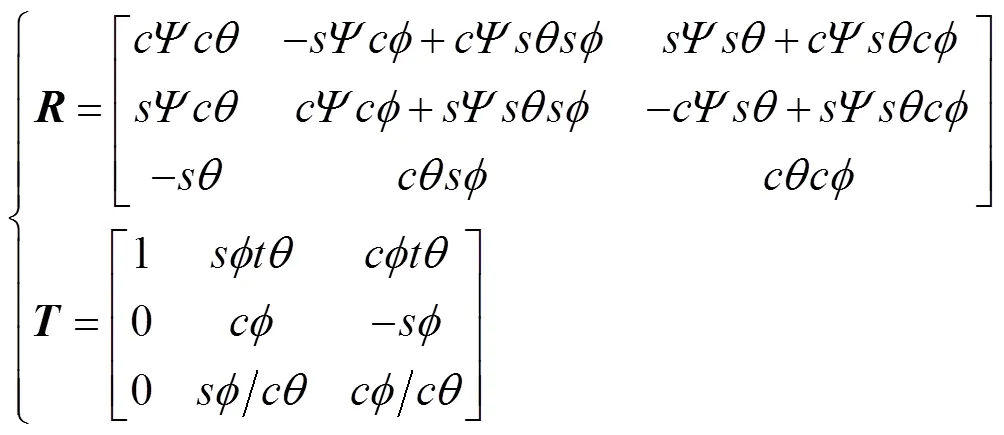
式中,、为转移矩阵, 且
1.2 动力学建模
由于AUV在水中的运动是一个非常复杂的流固耦合问题, 为便于进一步研究, 首先对AUV的运动过程进行如下假设: 1) 假设AUV为刚体, 质量不随时间变化; 2) 不考虑地球自转对AUV运动的影响; 3) 模型所处流场为稳态流场, 周围水流为静止状态。
根据非惯性坐标系下的牛顿运动定律, 得到AUV在载体坐标系下的运动方程

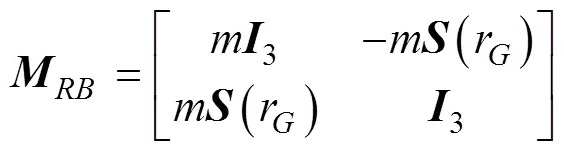


整理得AUV在理想状态下矢量化动力学模型

此外,神经细胞外葡萄糖浓度的增加将导致乙酰硫激酶活性降低,使Schwann细胞中脂肪过量累积,导致神经损伤。同时,葡萄糖由醛糖还原酶催化生成更多的山梨醇和果糖,产生较高的渗透压、细胞水肿和神经纤维的变性和坏死,从而促进LA的形成。
1.3 仿真模型搭建
通过对模型进行动力学和运动学分析, 可以着手搭建控制对象的Simulink仿真模型, 仿真过程中使用模型参数如表1所示。
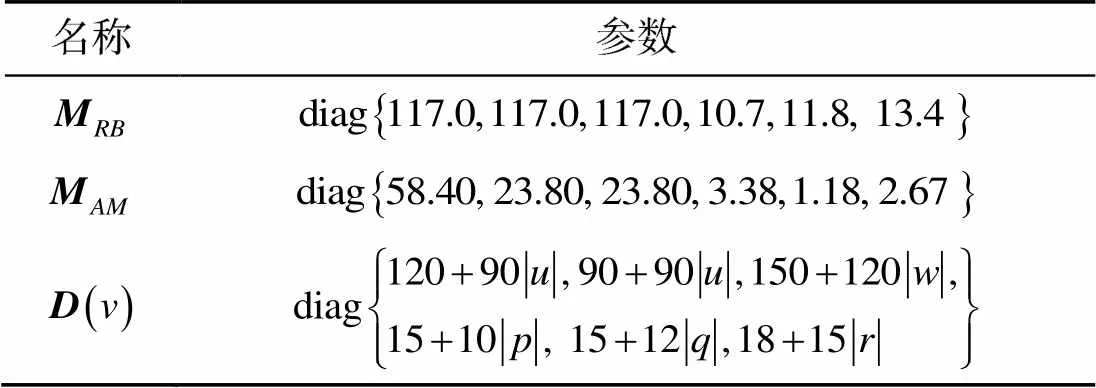
表1 AUV相关参数
2 控制系统设计
2.1 ADRC控制技术概述
非线性ADRC控制系统包含3个主要部分: 扩张状态观测器(extended state observer, ESO); 跟踪微分器(tracking differentiator, TD)和安排过渡过程; 非线性状态误差反馈控制律(nonlinear states error feedback control laws, NLSEF)。图2是一种典型的2阶非线性ADRC控制系统。
2.2 ADRC控制器设计
由于ADRC控制器存在的天然解耦优势, 可以先针对单DOF 2阶系统设计相应的ADRC控制器, 之后再将其拓展到6-DOF系统。
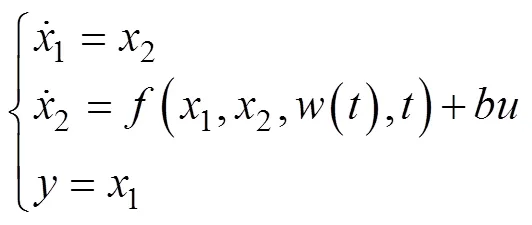
假设被控对象状态方程为
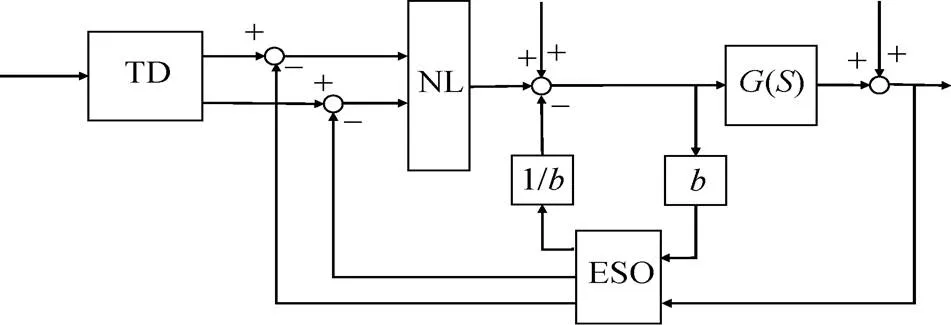
图2 ADRC控制系统结构示意图
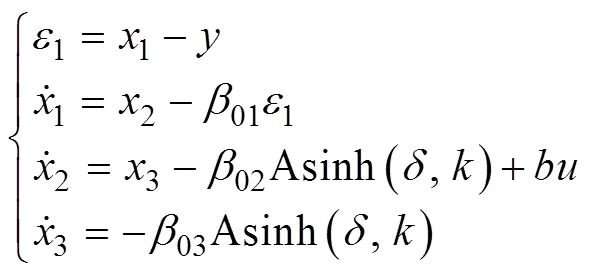
2.2.1 扩张状态观测器(ESO)

通过将信号进行解构可得相应的跟踪信号1及跟踪信号对应的微分信号2。传统TD架构为
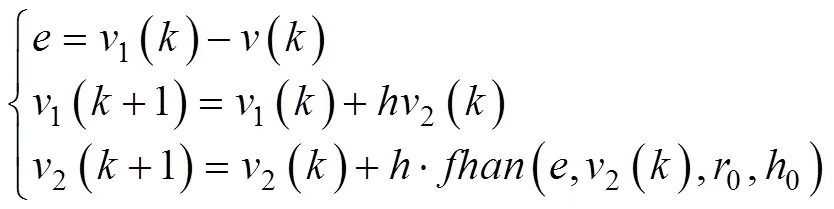
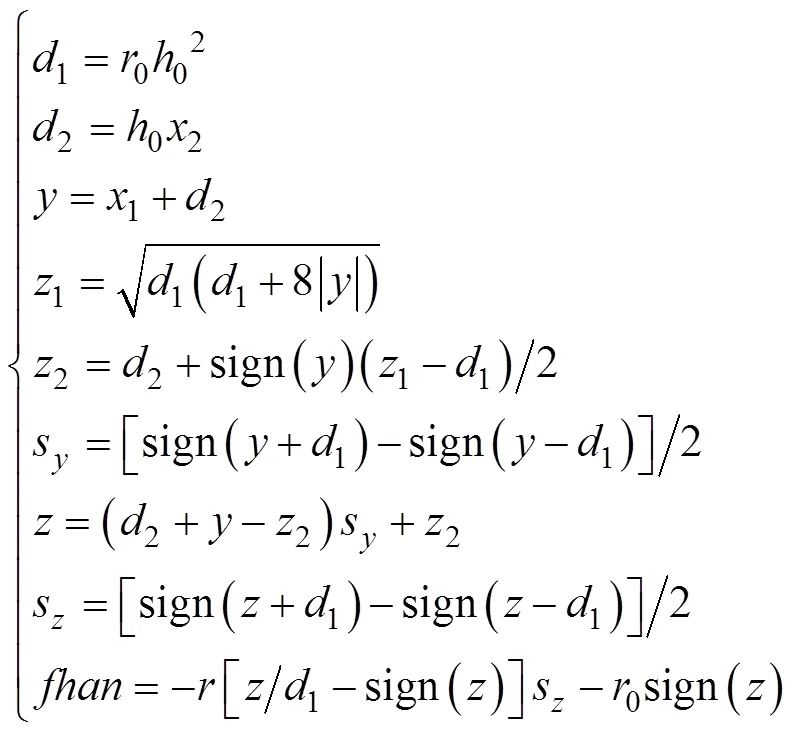
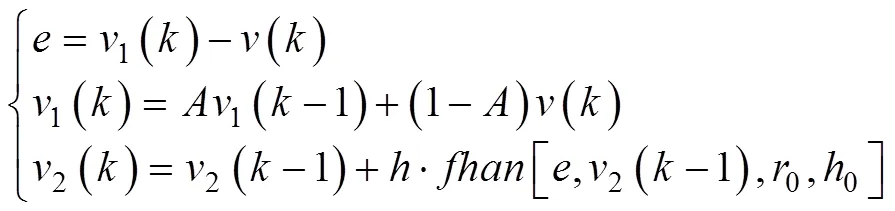
式中,为滤波参数。
2.2.3 非线性状态误差反馈控制律(NLSEF)


2.3 控制模型搭建
将搭建完成的控制器和控制对象联立, 可得多自由度全驱动AUV的ADRC控制系统模型, 见图3。
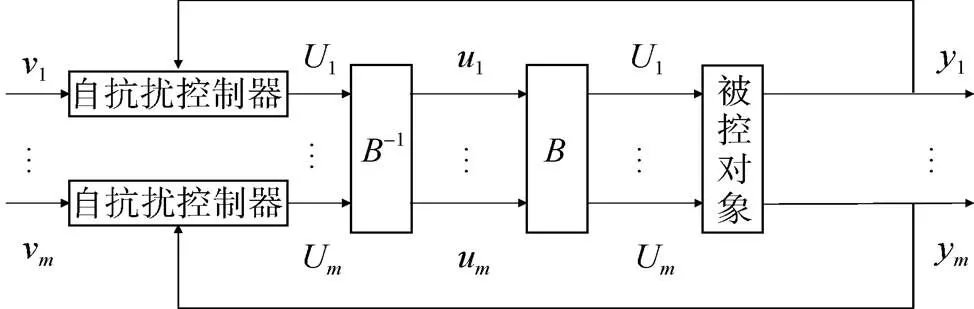
图3 多自由度全驱动AUV控制系统
2.4 参数整定及控制器优化
非线性ADRC控制器的一般形式有多达12个控制参数, 即使是简化后的模型也有8个控制参数。由于控制参数众多, 且调参难度较高, 不少学者就该问题展开了一系列的研究。目前常用的参数整定方法有经验法、人工智能法和基于时间尺度方法等。
通过动态参数整定, 将TD、ESO和NLSEF看作彼此较为独立的3部分, 先对TD和ESO进行参数整定, 在取得较为满意的效果之后, 结合NLSEF对ADRC控制器进行整体的参数整定。
为了简化ESO的整定过程, 将涉及到的相关参数取为

3 控制对象建模
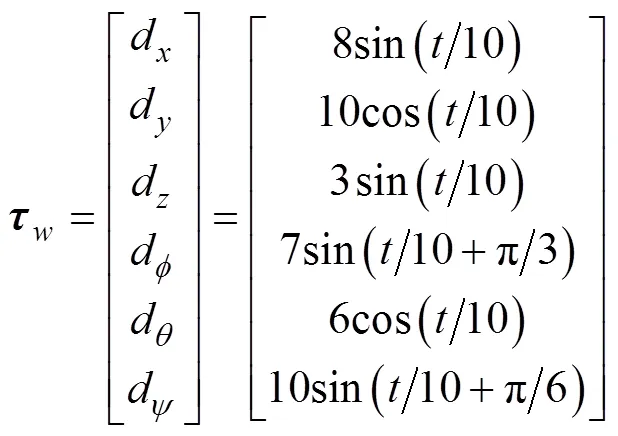
为了验证改进型ADRC控制器的抗扰能力及控制效果, 首先在单DOF情况下分别对PID控制器及ADRC控制器进行了在有正弦干扰情况下的位置阶跃仿真。仿真时间为1 000步, 阶跃信号在第100 s给出, 阶跃信号峰值为50, 正弦干扰信号的表达式为

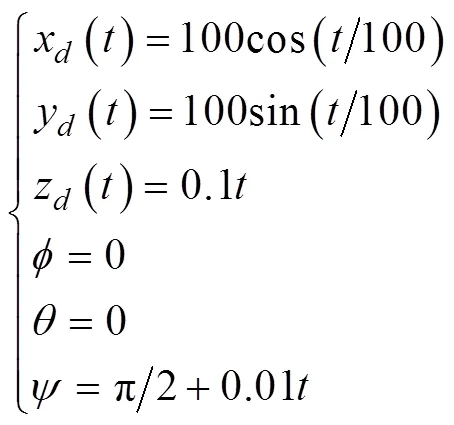
外加扰动
首先, 为验证ADRC控制器的抗干扰能力, 在相同的仿真条件及控制参数下, 搭建ADRC控制系统与PID控制系统, 在进行动态参数整定后, 对2套控制系统同时施加正弦干扰信号, 并给出对y轴坐标的位置阶跃跟踪仿真结果, 如图4所示。在施加正弦外界干扰的情况下, ADRC控制器与PID控制系统对单DOF阶跃信号的跟踪能力基本相同, 然而在达到目标位置后, PID系统存在较为严重的随扰动而抖动的现象, 偏移幅度最大为0.69, 而ADRC系统虽然也受到正弦干扰的影响, 但其最大偏移幅度仅为0.18, 远小于PID的最大偏移值, 这说明ADRC在位置阶跃响应时的抗干扰能力更强。
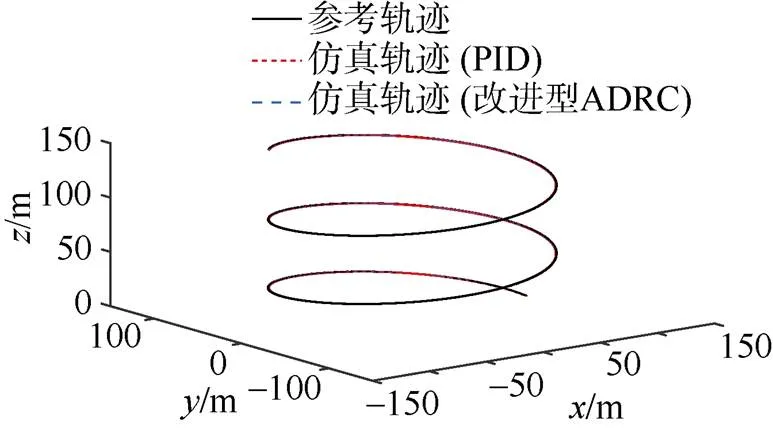
图5 螺旋线跟踪仿真曲线
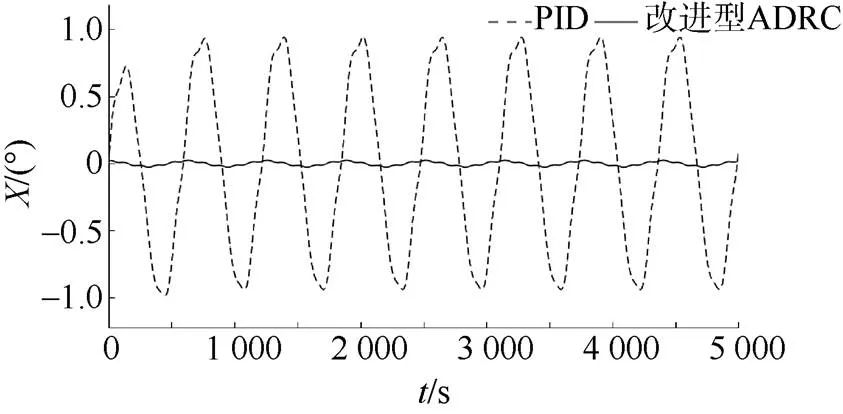
图6 X方向跟踪误差曲线
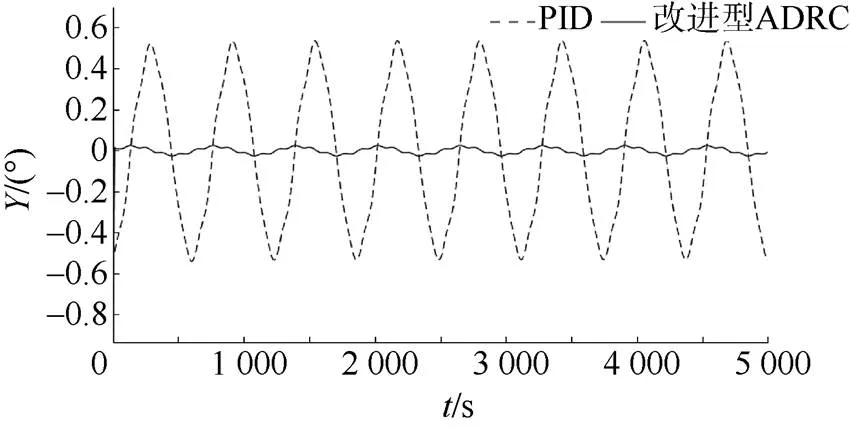
图7 Y方向跟踪误差曲线
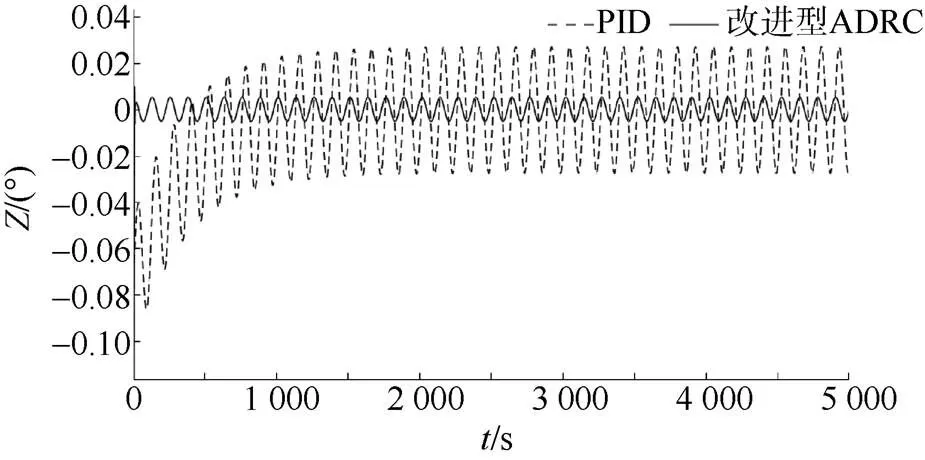
图8 Z方向跟踪误差曲线
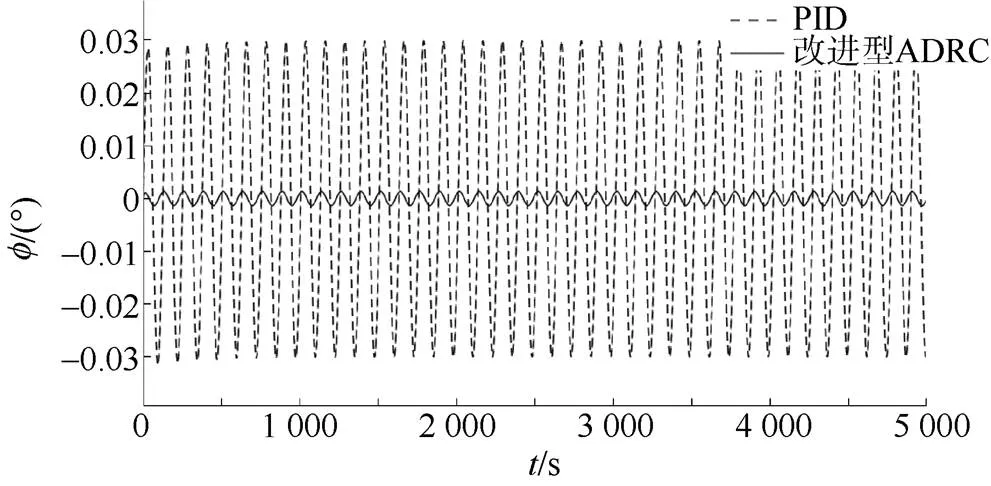
图9 ϕ方向跟踪误差曲线
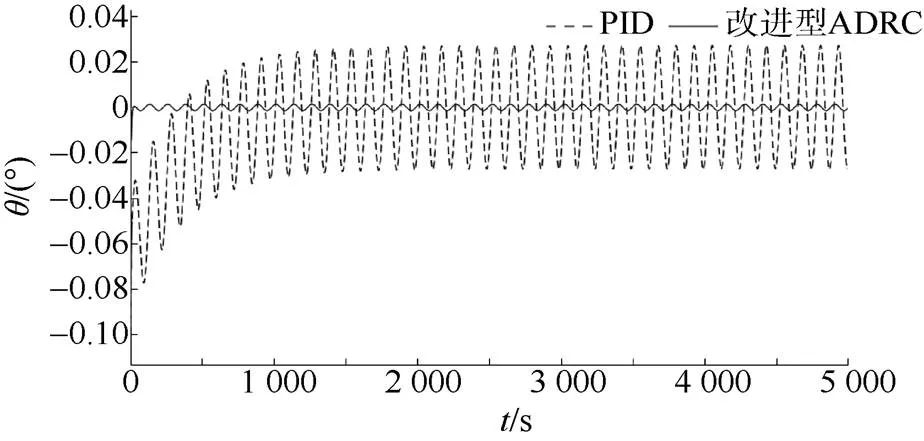
图10 q方向跟踪误差曲线

图11 ψ方向跟踪误差曲线
4 结束语
文中提出了一种基于反双曲正弦函数及改进型TD搭建的ADRC控制系统, 该控制系统有着比传统ADRC更少的待调参数, 且能够实现对AUV的高精度控制。基于该改进型ADRC控制器的相关仿真试验表明, 相比于传统的PID控制器, 其更加适用于多因素耦合的水下机器人系统, 可实现更高精度的控制, 控制过程也更加稳定, 在进行螺旋线仿真时的跟踪精度也更高。针对改进型ADRC系统结构的进一步分析论证, 将是未来的研究方向。
[1] 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23.Han Jing-qing. Auto-disturbances-rejection Controller and It’s Applications[J]. Control and Decision, 1998, 13(1): 19-23.
[2] 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3): 13-18.Han Jing-qing. From PID Technique to Active Disturb- ances Rejection Control Technique[J]. Control Enginee- ring of China, 2002, 9(3): 13-18.
[3] 周涛. 永磁同步电机调速系统的自抗扰控制[J]. 光学精密工程, 2016, 24(3): 582-589.Zhou Tao. Active Disturbance Rejection Control of Speed Governing System for PMSM[J]. Optics and Precision Engineering, 2016, 24(3): 582-589.
[4] 高剑. 无人水下航行器自适应非线性控制技术[M]. 西安: 西北工业大学出版社, 2016: 15-63.
[5] 赵志良. 自抗扰控制设计与理论分析[M]. 北京: 科学出版社, 2019: 180-231.
[6] Habib C L, Zhu Q D. Path Following Control of Fully-actuated Autonomous Underwater Vehicle in Presence of Fast-varying Disturbances[J]. Applied Ocean Research, 2019, 86: 40-46.
[7] Castañeda L A, Luviano-Juárez A, Ochoa-Ortega G, et al. Tracking Control of Uncertain Time Delay Systems: An ADRC Approach[J]. Control Engineering Practice, 2018, 78(9): 97-104.
[8] 万磊, 张英浩, 孙玉山, 等. 欠驱动智能水下机器人的自抗扰路径跟踪控制[J]. 上海交通大学学报, 2014, 48 (12): 1727-1731.Wan Lei, Zhang Ying-hao, Sun Yu-shan, et al. ADRC Path- Following Control of Underactuated AUVs[J]. Journal of Shanghai Jiaotong University, 2014, 48(12): 1727-1731.
[9] 胡文华, 曹仁赢. 四轴飞行器串级ADRC轨迹跟踪控制[J]. 武汉科技大学学报, 2019, 42(4): 299-304.Hu Wen-hua, Cao Ren-ying. Trajectory Tracking Control for Quadrotor Based on Cascaded ADRC[J]. Journal of Wuhan University of Science and Technology(Natural Science Edition), 2019, 42(4): 299-304.
[10] Horacio C E, John C R, Sergio A, et al. Rejection of Varying-frequency Periodic Load Disturbances in Wind-turb- ines through Active Disturbance Rejection-based Control [J]. Renewable Energy, 2019, 141: 217-235.
[11] Plaskonka J. The Path Following Control of a Unicycle Based on the Chained form of a Kinematic Model Derived with Respect to the Serret-Frenet Frame[C]//Methods and Models in Automation and Robotics(MMAR). 2012 17th International Conference. Miedzyzdrojie: MMAR, 2012.
[12] Fu C F, Tan W. Tuning of Linear ADRC with Known Plant Information[J]. ISA Transactions, 2016, 65: 384-393.
[13] 张勇, 陈增强, 张兴会, 等. 基于自抗扰的四旋翼无人机动态面姿态控制[J]. 吉林大学学报(工学版), 2019, 49 (2): 562-569.Zhang Yong, Chen Zeng-qiang, Zhang Xing-hui, et al. Dynamic Surface Attitude Control of Quad-rotor UAV ba- sed on ADRC[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(2): 562-569.
[14] 高强, 刘俊杰, 刘文杰. 四旋翼飞行器姿态的自抗扰控制研究[J]. 计算机仿真, 2016,33(12):38-41.Gao Qiang, Liu Jun-jie, Liu Wen-jie. Attitude Regulation of Quadrotor UAV Via ADRC Methodology[J]. Computer Simulation, 2016, 33(12): 38-41.
Modeling and Simulation of Fully Actuated AUV Based on Modified ADRC
WANG Zhen, WANG Jun-xiong, NIU Xiao-chen, SU Wei
(State Key Laboratory of Ocean Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
Autonomous undersea vehicles(AUVs) are nonlinear, strongly coupled, and vulnerable to external disturbances. To improve the control accuracy of AUVs, a 6-degree-of-freedom fully actuated AUV is modeled, and a proportional integral derivative(PID) controller and auto disturbance rejection controller(ADRC) are built. A comparative analysis reveals that the traditional ADRC has too many parameters to adjust, and the tracking speed of each link of the tracking differentiator(TD) is slow. Therefore, the Asin function is used to simplify each link of the traditional ADRC, and the structure of the TD is improved to solve the problem of slow tracking speed. The control effect of the PID and modified ADRC is simulated under the same simulation conditions. Simulation results show that the modified ADRC has higher control accuracy and stronger anti-disturbance ability than PID when the motion of a multi-freedom system is controlled.
autonomous undersea vehicle(AUV); auto disturbance rejection controller(ADRC); proportional integral derivative(PID) control; path tracking
TJ630.33; TP13
A
2096-3920(2021)01-0048-06
10.11993/j.issn.2096-3920.2021.01.007
王震, 王俊雄, 牛啸辰, 等. 基于改进型ADRC的全驱动AUV建模与仿真[J]. 水下无人系统学报, 2020, 28(6): 48-53.
2019-12-04;
2020-04-04.
王 震(1996-), 男, 硕士, 主要研究方向为水下机器人路径跟踪.
(责任编辑: 杨力军)
猜你喜欢
飞控与探测(2022年6期)2022-03-20 02:16:14
一重技术(2021年5期)2022-01-18 05:42:08
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
力学学报(2020年4期)2020-08-11 02:32:12
测控技术(2018年4期)2018-11-25 09:47:14
天津教育·下(2018年9期)2018-07-13 08:25:47
黑龙江电力(2017年1期)2017-05-17 04:25:08
电机与控制应用(2015年2期)2015-03-01 03:49:22
电测与仪表(2014年13期)2014-04-04 12:04:16
电力自动化设备(2013年11期)2013-09-18 02:55:14
