
国外水下涡流探测技术研究进展
2021-03-10 07:59何心怡程善政
水下无人系统学报 2021年1期
何心怡, 程善政, 卢 军, 祝 琳
国外水下涡流探测技术研究进展
何心怡, 程善政, 卢 军, 祝 琳
(海军研究院, 北京, 100161)
受复杂海洋环境以及不断提升的潜艇隐蔽性能的影响, 为了进一步提高探潜能力, 开展新型非声探测技术迫在眉睫。基于此, 文中综述了国外在水下涡流探测技术领域的研究进展, 阐述了潜艇涡流生成机理及探测可行性。通过对比水下涡流仿生探测技术、基于粒子图像测速的探测技术以及激光探测技术的特点可知, 水下涡流激光探测技术以其非接触、灵敏度高、结构简单等特点, 具有良好的发展潜力, 值得深入研究。
潜艇; 水下涡流; 仿生探测; 粒子图像测速探测; 激光探测
0 引言
2015年, 美国战略与预算评估中心发布了《水下战新纪元报告》, 认为非声探测技术的出现与推广应用将使未来水下作战环境更为复杂, 并对美国水下安全构成严峻挑战[1]。
长期以来, 声呐一直是探潜的主战装备, 但随着潜艇隐蔽性能的不断提升以及复杂海洋环境的影响, 急需开展新型非声探测技术以提高探潜能力。为此, 国外海军强国先后开展了多类型水下非声探测技术研究, 如英国、芬兰、美国和俄罗斯等国先后研制了多种磁、水压等探测系统, 以实现对潜艇的有效探测[2-4]。最近数十年, 针对潜艇水动力特性中的涡流特性而出现的探潜技术, 具有探测距离远、抗干扰能力强的特点, 已逐步由理论研究向实际应用发展, 有望显著提高探潜能力。公开发表的文献可知: 俄罗斯已掌握了利用涡流检测潜艇的技术, 并成功进行了实验[5-6]; 美国利用潜艇涡流信息探测到在300 m水深航行的前苏联潜艇, 甚至可能通过携载的涡流探测系统, 发现潜艇通过数小时后的涡流, 从而实现对潜艇的可靠探测[6-7]。文中从水下非声涡流探测技术出发, 基于国外研究情况, 给出潜艇的涡流特性, 重点论述了国外针对潜艇涡流特性的探测技术进展, 可为反潜战提供新的技术参考。
1 潜艇涡流特性
1979年, Lin等[8]通过对沉浸在密度分层液体中物体的运动特性研究发现, 其尾部会产生漩涡状尾流, 其主要原因是由于运动体打破了分层液体平衡, 液体在浮力与重力的作用下重新分配, 进而形成漩涡。


图1 潜艇模型加速运动产生的涡流场
2000年, Arizona国立大学研究表明[10], 分层流体中的潜艇加速、减速或改变航向时, 会将巨大的能量传递给周围的流体, 导致产生异乎寻常的涡流, 该涡流远大于海洋中稳态产生的漩涡, 其尺度有数公里之巨, 持续时间可达数天。潜艇涡流特性为[10]: 航行0.5 h后, 其涡流横截面可扩展到80~100 m、宽度约20 m; 航行1.5 h后, 潜艇涡流横截面为喇叭口状, 高度约40 m, 宽度达150~200 m; 之后涡流开始发散, 形成单个涡流团分布在相对较大的立体空间内。基于潜艇的涡流特性, 有望实现探潜技术的突破性进展。
2013年, 美国海军作战中心Yashodhararao对潜艇模型尾流特性进行了染色可视化实验[11], 潜艇模型如图2所示。

图2 实验所用潜艇模型
在实验水槽中放入染色剂, 潜艇模型航行速度为16 km/h, 观察记录染色剂的形态变化。通过实验发现, 潜艇模型前端会产生马蹄形涡, 如图3(a)所示; 随后染色剂沿潜艇侧壁扩散, 如图3(b)所示; 最后该染色剂沿潜艇模型末端形成涡流, 如图3(c)所示。

(A) 前端; (B) 周边; (C) 涡流
综上分析可知, 潜艇在分层液体中, 其尾部会产生涡流, 该涡流具有持续时间长、分布区域广等特点, 可作为新型探潜技术的信息源, 提高探潜能力。
2 水下涡流仿生探测技术
生物学家发现, 在混浊昏暗、能见度只有几米的海水中, 海豹依然能找到并捕捉到快速游动的鱼, 原因在于它们具有独一无二的胡须。生物学家的解释是: 海豹的胡须具备一种独特功能, 即检测水中微弱的波动, 因为任何物体在水中活动时都会留下小型漩涡, 而且这些小型旋涡均将保持一段时间后才会慢慢消失, 这就是海豹捕鱼的机理。据美国《大众机械》网站报道[12]: 美、韩两国科学家正对海豹的“胡须技术”进行联合攻关, 如果这项技术得以成功应用, 将大幅提升对敌方潜艇的探测能力, 因为无论航行与否, 潜艇都会在水中留下微小漩涡, 从而被发现。基于该原理, 美国福尼亚大学提出了基于潜艇涡流特性的仿生探测系统[13], 利用电容电感原理进行阵列组合构建仿海豹胡须探测系统, 如图4所示。

图4 仿生胡须结构示意图
利用仿生胡须对潜艇模型涡流进行了性能测试, 方法如图5所示。图中, 黄色路径为潜艇模型运行路径, 红色路径为仿生胡须结构跟踪路径。通过测试发现, 仿生胡须可给出潜艇模型的行进路径方向信号。

图5 仿生胡须对潜艇模型的跟踪实验
3 水下涡流光学探测技术
3.1 基于粒子图像测速的水下涡流探测技术
粒子图像测速(particle image velocimetry, PIV)技术是在传统流动显示技术的基础上, 充分吸收现代计算机技术、光学技术以及数字图像技术而形成的新型流场测试技术。利用相机、示踪粒子和绿光照明光源对物体运动尾流进行信息采集, 以实现对尾流的成像, 其系统组成如图6所示。该技术适配于小区域系统检测。
图7为以色列理工学院航空航天工程学院针对水翼船模型进行的尾流PIV成像探测实验[14],探测结果发现其尾流呈现漩涡状, 图中: “×”为漩涡核; 横、纵坐标分别表示水平和纵向距离与艇深长度的比值。该实验表明在密度分层水体中, 尾流远场形态呈现为漩涡状态。

图6 PIV探测系统结构

图7 密度分层液体中水翼船加速后的尾流
3.2 水下涡流激光探测技术
潜艇在水下航行时, 打破了水下平衡环境, 其尾部将产生涡流, 可通过探测激光检测光特性的变化情况发现涡流。基于该原理, 印度威洛尔大学开展了激光传输特性原理下的涡流探测研究[15], 探测原理如图8所示。

图8 激光束偏转探测原理
探测激光发射后, 激光经由水介质传输后由光电探测器接收, 所接收的激光信号被探测器转换以电流方式输出。当所探测的水介质存在涡流时, 其探测激光特性将发生变化, 通过对该变化进行信号处理即可检测潜艇产生的涡流, 最终实现对潜艇的探测。基于此, 印度于2013年研制出了相应测试系统, 如图9所示。该测试系统安装于海洋考察船的船锚上, 船锚放置于水下42 m, 对A74海洋声学研究船进行监测, 成功地检测到其尾部涡流。
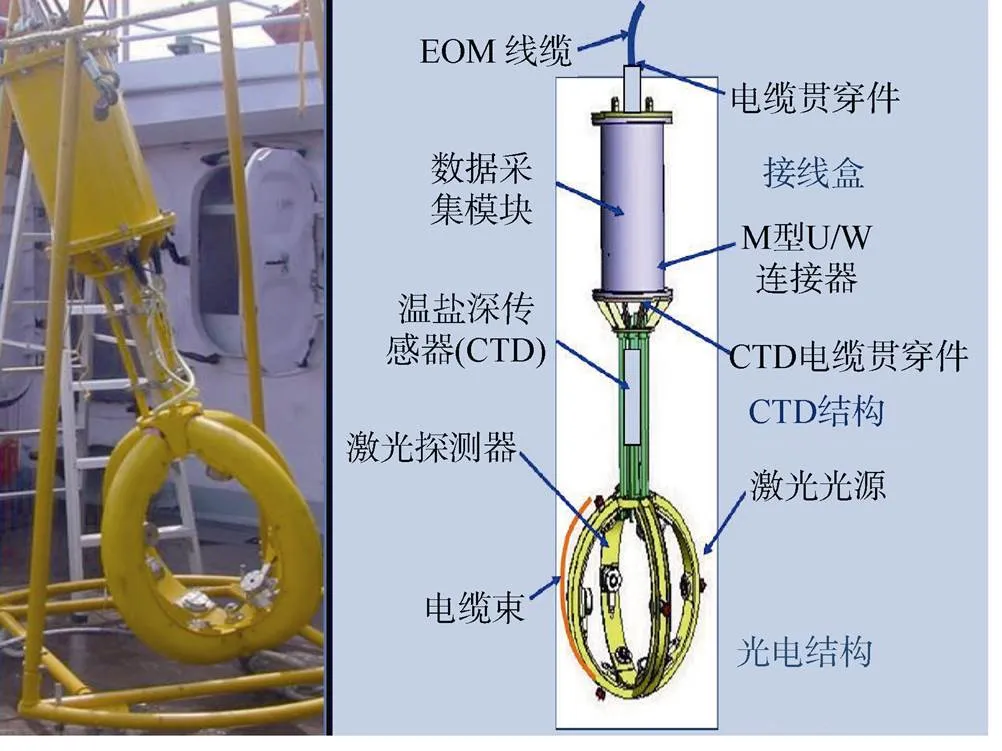
图9 印度研发的激光测试系统
4 结束语
文中综述了国外在水下涡流探测技术的研究进展, 包括潜艇涡流的生成机理与特性以及可能的探测技术途径。潜艇涡流的衰减周期长、涡流尺度大, 水平尺度可达数公里、垂直尺度可达数十米。基于潜艇的涡流特性, 国外开展了仿生探测、PIV图像探测及激光探测涡流技术研究, 其技术至少处于原理样机阶段, 并已通过实验验证初步证明了涡流探测技术的可行性。仿生探测技术通过电容电感的电学信号测量水下涡流, 由于受电学测量灵敏度的限制, 难以实现对潜艇远场涡流探测; PIV通过示踪粒子来实现尾流场检测, 不适用于广域海况探测; 而激光探测以其非接触、灵敏度高、结构简单等特点, 是一种具有良好发展潜力的涡流探测技术, 值得开展深入研究。
[1] 于宪钊, 白旭尧. 美国水下作战革命: 非声探测使水下作战更复杂[EB/OL]. (2015-11-18)[2020-12-24]. http: //ocean.china.com.cn/2015-11/18/content_37093613.htm.
[2] Zhang S, Yang Z, Yang L. Multi-directional Infrared Imaging Characterization of Ship Kelvin Wake[C]//IEEE Computer Society. Xi’an, China: IEEE, 2012: 144-146.
[3] Zilman G, Zapolski A, Marom M. The Speed and Beam of A Ship from Its Wake’s SAR Images[J]. IEEE Trans. Geosci. Remote Sens., 2002, 42: 2335-2343.
[4] Xu Z H, Du C P, Xia M Y. Evaluation of Electromagnetic Fields Induced by Wake of an Undersea-moving Slender Body [J]. IEEE Access, 2018, 6: 2943-2951.
[5] Beardsley, Tim. Making waves[J]. Scientific American, 1993, 268(2): 32.
[6] 武宁, 李伟, 穆连运. 基于潜艇涡流场检测技术的潜艇探潜效能分析[J]. 舰船电子工程, 2017, 37(1): 111-114. Wu Ning, Li Wei, Mu Lian-yun. Antisubmarine Detection Efficiency Analysis of Submarine Based on the Testing Technology of Submarine Eddy Current[J]. Ship Electr- onic Engineering, 2017, 37(1): 111-114.
[7] 张军, 张效慈, 赵峰, 等. 源于水动力学的潜艇尾迹非声探测技术研究之进展[J]. 船舶力学, 2003, 7(2): 121- 128. Zhang Jun, Zhang Xiao-ci, Zhao Feng, et al. Progress of Investigation on Non-acoustic Detection for Submarine Wake Originated from Naval Hydrodynamics[J]. Journal of Ship Mechanics Echanics, 2003, 7(2): 121-128.
[8] Lin J T, Pao Y H. Wakes in Stratified Fluids[J]. Annual Review of Fluid Mechanics, 1979, 11: 317-338.
[9] Voropayev S I, Smirnov S A. Vortex Streets Generated by A Moving Momentum Source in a Stratified Fluid[J]. Physics of Fluids, 2003, 15(3): 618-624.
[10] Li E, Alin N, Fureby C. Computational Study of Wakes behind Submarines and Surface Ships[R]. Swedish De fense Research Agency, Tumba. Weapons and Protection Div,2000: 1-31.
[11] Yashodhararao A, Rao A S, Rao A S. Dynamics of Fluid Flow Around Aerofoil, and Submarine: Effect of Winglets, the International Journal of Engineering and Science [EB/OL].(2013-02-01)[2020-11-11]. http://www.Theijes. com/index.html.
[12] 李文. 海豹“胡须技术”或将成潜艇“杀手”[EB/OL]. (2018-08-21)[2020-12-20].http://military.people.com.cn/n1/2018/0821/c1011-30241234.html.
[13] Eberhardt W C, Wakefield B F, Murphy C T, et al. Development of an Artificial Sensor for Hydrodynamic Detection Inspired by a Seal’s Whisker Array[J]. Bioinspiration & Biomimetics, 2016, 11(5): 056011.
[14] Hadar B G, Alex L, Roi G. A Stratified Wake of a Hydrofoil Accelerating from Rest[J]. Experimental Thermal and Fluid Science, 2016, 70: 366-380.
[15] Swain S K, Trinath K, Tatavarti. Non-Acoustic Detection of Moving Submerged Bodies in Ocean[J]. International Journal of Innovative Research & Development, 2012, 1(10): 361-372.
1. 谢少荣, 刘坚坚, 张丹. 复杂海况无人艇集群控制技术研究现状与发展[J]. 水下无人系统学报, 2020, 28(6).
2. 郭银景, 鲍建康, 刘琦. AUV实时避障算法研究进展[J]. 水下无人系统学报, 2020, 28(3).
3. 钱东, 赵江. 海上实兵作战实验综述——概念、案例与方法[J]. 水下无人系统学报, 2020, 28(2).
4. 黄颖淞, 葛辉良, 王付印, 等. 蛙人探测声呐系统发展综述[J]. 水下无人系统学报, 2020, 28(1).
5. 孙芹东, 兰世泉, 王超, 等. 水下声学滑翔机研究进展及关键技术[J]. 水下无人系统学报, 2020, 28(1).
6. 何心怡, 陈双, 陈菁, 等. 国外反潜训练靶标应用现状与启示[J]. 水下无人系统学报, 2019, 27(6).
7. 钱洪宝, 卢晓亭. 我国水下滑翔机技术发展建议与思考[J]. 水下无人系统学报, 2019, 27(5).
8. 吴尚尚, 李阁阁, 兰世泉, 等. 水下滑翔机导航技术发展现状与展望[J]. 水下无人系统学报, 2019, 27(5).
9. 文海兵, 宋保维, 张克涵, 等. 水下磁耦合谐振无线电能传输技术及应用研究综述[J]. 水下无人系统学报, 2019, 27(4).
10. 刘伟, 范辉, 吕建国. 超高速水下航行器控制方法研究热点综述[J]. 水下无人系统学报, 2019, 27(4).
11. 严浙平, 刘祥玲. 多UUV协调控制技术研究现状及发展趋势[J]. 水下无人系统学报, 2019, 27(3).
12. 黄玉龙, 张永刚, 赵玉新. 自主水下航行器导航方法综述[J]. 水下无人系统学报, 2019, 27(3).
13. 胡桥, 刘钰, 赵振轶, 等. 水下无人集群仿生人工侧线探测技术研究进展[J]. 水下无人系统学报, 2019, 27(2).
14. 王延杰, 郝牧宇, 张霖, 等. 基于智能驱动材料的水下仿生机器人发展综述[J]. 水下无人系统学报, 2019, 27(2).
15. 魏博文, 吕文红, 范晓静, 等. AUV导航技术发展现状与展望[J]. 水下无人系统学报, 2019, 26(1).
16. 张萌, 谭思炜, 张林森. 美海军三型鱼雷最新研发进展及技术途径[J]. 水下无人系统学报, 2019, 26(1).
Research Progress in Foreign Underwater Vortex Detection Technology
HE Xin-yi, CHENG Shan-zheng, LU Jun, ZHU Lin
(Naval Academy of Armament, Beijing, 100161, China)
Considering complex marine environments and the regular improvement of submarine stealth performance, developing a new non-acoustic detection technology to further improve the ability of submarine detection has become urgent. Accordingly, this study summarizes the research on foreign underwater vortex detection technology and explains both the mechanism of submarine vortex generation and the feasibility of detection. The characteristics of underwater vortex biomimetic detection, particle image velocimetry(PIV) detection, and laser detection technology are compared. Comparative results reveal that underwater vortex laser detection technology has good developmental potential because of its non-contact nature, high sensitivity, and simple structure, thus making it worthy of further study.
submarine; underwater vortex; biomimetic detection; particle image velocimetrydetection; laser detection
TJ630.3; TN973.3
A
2096-3920(2021)01-0001-05
10.11993/j.issn.2096-3920.2021.01.001
何心怡, 程善政, 卢军, 等. 国外水下涡流探测技术研究进展[J]. 水下无人系统学报, 2021, 29(1): 1-5.
2020-12-01;
2021-01-10.
何心怡(1976-), 男, 博士, 正高级工程师, 主要研究方向为水中兵器、水声信号处理技术.
(责任编辑: 杨力军)
猜你喜欢
兵器装备工程学报(2022年10期)2022-11-01
北京航空航天大学学报(2022年8期)2022-08-31
核安全(2022年3期)2022-06-29
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年4期)2021-07-28
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
风能(2020年7期)2020-04-19
