
机载光电稳定平台建模及动态特性分析
2021-03-09 09:19胥青青吴玉敬
激光与红外 2021年2期
嵇 婷,纪 明,胥青青,吴玉敬,薛 飞
(西安应用光学研究所,陕西 西安 710065)
1 引 言
机载光电平台是一个将“光”“机”“电”高度结合的高科技产物,它包括可见光、红外、激光探测仪等光电传感器,具备在惯性空间保持稳定、空域侦查探测、目标自动跟踪等功能[1-2]。
目前,机载光电平台普遍采用的是两轴两框架和两轴四框架的结构形式。两轴四框架可以很好的隔离风阻以及载机带来的扰动,但是四个框架的复杂结构决定了这种形式的光电吊舱体积大、成本高,所以在无人机、直升机等小型载机和航空侦察平台上使用最多的还是机构简单、成本低、体积小的两轴两框架光电稳定平台[3-4]。随着全球范围内小型无人机在军用及商用领域应用的增多,从侦查、监视及勘探等成像负载稳定到激光标识器、照明器瞄准都表现出了对小万向架的需求[5]。两轴两框架光电稳定平台在载机与平台之间以及平台框架之间的动态特性存在着复杂的耦合关系[6],对其动态特性的研究是结构设计和控制系统设计的的基础。因此对两轴两框架机载光电稳定平台的动力学特点展开系统的分析和研究具有十分重要的意义。
要研究两轴两框架机载光电稳定平台的动态特性首先要建立完备的动力学模型,在模型的基础上分析不同条件下的特点。许多学者对两轴两框架稳定平台的建模展开了研究。周瑞青[7]对捷联导引头的两自由度天线平台进行了动力学的研究。余驰[8]推导出机载光电转塔系统的运动平衡方程,采用三环随动控制,分析了系统在不同的输入和模拟姿态扰动环境下的仿真特性。但在建立运动平衡方程时,没有考虑方位框和俯仰框之间的耦合关系。彭业光[9]以两轴两框架光电稳定平台为研究对象,对关键部件进行了建模,通过系统辨识获得了平台的模型信息,在建立平台力矩关系平衡方程时,作者只考虑了电机的电磁力矩、惯性力矩和转轴摩擦力矩,在建立光电稳定平台模型时采用辨识的方法用一个二阶传函进行描述,这种简化的方法和模型无法分析框架间的耦合关系。国外学者A.K.RUE,Member也对两轴两框架系统的耦合关系展开了研究[10-11],但其模型过于复杂,不便于分析和工程应用。
本文依据牛顿力学概念进行了两轴两框架光电稳定平台的动力学和运动学关系的推导,建立了数学模型,揭示了载机与平台之间以及平台框架之间运动耦合的机理,在此基础上建立了仿真模型,分析了不同状态下的系统动态特性。
2 两轴两框架光电稳定平台运动学关系分析
设定如下稳定瞄准线的两轴两框架系统:外万向架为方位框架,内万向架为俯仰框架,俯仰框架安装在方位框架内;俯仰框架上安装有两单自由度陀螺,陀螺的敏感轴与光轴正交;Ma为方位轴力矩电机,Mf为俯仰轴力矩电机。
按照右手系定义如下坐标系:载机坐标系b与载机固连;载机坐标系原点位于两个框架轴的交点。外框坐标系a与方位框架固连,方位框架相对于载机绕z轴转动角度为θ;内框坐标系f与俯仰框架固连,俯仰框架相对于方位框架绕y轴的转动角度为ψ。由于探测器与稳定平台内框固连,因此视轴坐标系即内框坐标系,OfXf轴即光轴,指向载机前方为正,如图1所示。
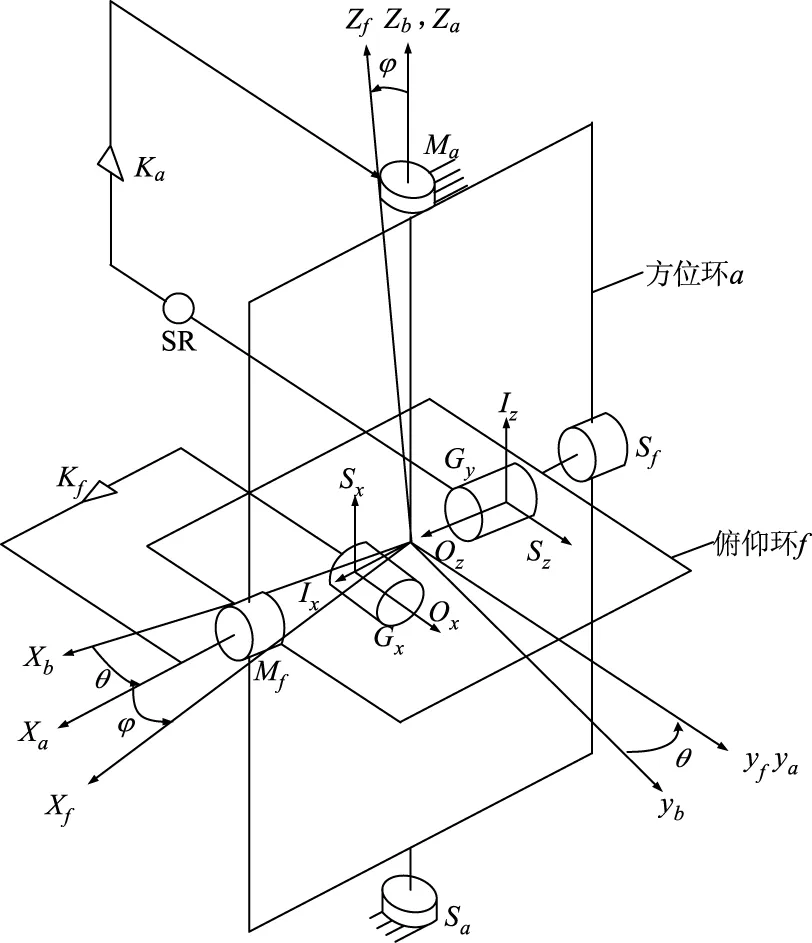
图1 坐标系示意图
2.1 外框、内框角速度

(1)
设载机的三轴角速度为:
(2)
内外框架角速度均为为载机角速度经过坐标变换投影到外框架坐标系的角速度分量与框架自身偏转角速度之和[14],外框角速度:
(3)
内框角速度:
(4)
2.2 外框、内框角加速度
由2.1小节中的角速度关系式可得外框角加速度:
(5)
内框角加速度为:

(6)
从以上载机、外框架、内框架之间的角速度、角加速度传递关系的推导过程中可以看出框架角速度主要由外部角速度投影分量和自身运动组成,而框架角加速度的构成很复杂,包含载机角速度、载机角加速度、框架角速度、框架角加速度等各种量的耦合作用。
3 动力学建模
两轴稳定平台的动力学建模主要是描述光轴的空间角位置和角速度与两个框架电机驱动力矩之间的关系。
根据刚体绕定点运动的欧拉运动学方程[13],得出框架的动力学方程为:

(7)
其中,∑M为合力矩向量;J为转动惯量矩阵;ω为角速度向量。
设框架加工和安装时保证一定的精度,负载安装时调节位置或配重,使得两框转动惯量都分布在惯性主轴上,则转动惯量阵为对角阵。
3.1 外框模型
外框动力学基本方程为:
(8)
其中,∑Mo为合力矩向量;[∑Mi]o是内框合力矩从内框坐标系变换到外框坐标系的结果,将其进行坐标变换,得:
(9)
将式(8)写成向量形式为:

(10)
外框只在zo轴方向具有转动自由度,因此只取第三个分量,将式(9)和式(10)代入式(8)可得:

(11)
记Mimboz是外框和内框质量不平衡引起的非线性干扰力矩向量投影到外框坐标系沿z轴的分量,即:
(12)
同时将内框对外框的耦合力矩效应记为:
(13)
框架间的耦合力矩是两轴框架结构系统不可避免的,内层框架对外层框架有负载耦合力矩效应,内框是最内层框架,不含负载耦合力矩,外框受到内框的负载耦合力矩项影响[14]。得到外框动力学模型为:
(14)
3.2 内框模型
参照3.1小节可得内框的动力学模型,即:
(15)
一般通过提高机械加工和装配的精度、调整机械部件安装位置以及配重等措施,使各个框架的转动惯量在各自所在的坐标系三个轴的分量非常接近甚至相同,从而由质量不平衡引起的非线性干扰力矩可以近似忽略。
至此得到两轴稳定平台的动力学模型,即:
(16)
电机电流环模型为[15]:
学校可为学生构建科技教育系列活动,即组织全校师生每学年听一次科技创新报告、每学期组织一场青少年科技创新成果展示、每月举行一次科技信息发布、各班每组编写一份手抄报等活动来加强科技创新教育。
(17)
其中,ua为电机输入电压;La为电机的电枢电感;Ra为电机的电枢电阻;Kt为电机的力矩系数;Ke为电机的反电势系数;ω为电机旋转角速度,即框架相对角速度。
将式(17)代入式(16)得到两轴稳定平台两个框架的机电模型,即:
(18)

从上面模型可看出,公式右边是框架转动惯量和框架角加速度,左边都是框架自身合力矩,包括框架电机的驱动力矩、框架质量不平衡导致的扰动力矩和内层框架对外层框架的耦合力矩。
4 运动耦合特性分析
根据机电模型在Matlab/simulink环境下建立仿真模型,并根据实际项目给定算例进行时域仿真。采用四阶龙格库塔法计算微分方程。
具体参数为:
Rai=13.5 Ω;Ji=0.0171 N·m·s2/rad;Jo=0.0296 N·m·s2/rad;Rao=12.5 Ω;Lai=0.00675H;
Lao=0.0075 H;kti=0.81 N·m/A;kto=0.28N·m/A;kei=0.76 V·s/rad;keo=0.275 V·s/rad。
4.1 内外框干扰敏感性分析
令载机三轴角速度为0 rad/s,内外框架电机输入电压为0 V,给内外框同时加入幅值1 N·m,宽度0.01 s,在1 s时发生的脉冲干扰力矩信号,得到内外框架运动角速度如图2所示。

图2 脉冲干扰力矩下内外框架角速度
从图2可知,扰动作用加入后内外框角速度均快速受扰,外框扰动幅度为0.21 rad/s,内框扰动幅度为0.58 rad/s。当脉冲扰动结束后,外框在45 s之后恢复到0,内框5 s恢复到0。同样幅值和宽度的脉冲扰动力矩作用下,内框比外框更敏感,内框受扰幅度大于外框,同时内框更快恢复稳定。
4.2 光轴干扰敏感性分析
4.2.1 扰动力矩阶跃响应
令载机三轴角速度为0 rad/s,内外框架电机输入电压为0 V,给内外框同时加入0.01 N·m的阶跃扰动力矩信号,得到光轴方位、俯仰角速度如图3所示。
当未知扰动加入时,光轴方位角速度出现震荡,光轴方位角速度受扰幅度1.62 rad/s,光轴俯仰角速度快速受扰后稳定,受扰幅度0.22 rad/s。同时可以得出,正向扰动力矩引起光轴俯仰角速度负向增长直到稳态。由于内外框架参数不同,在框架扰动力矩作用下的角速度斜率和稳态值不同。
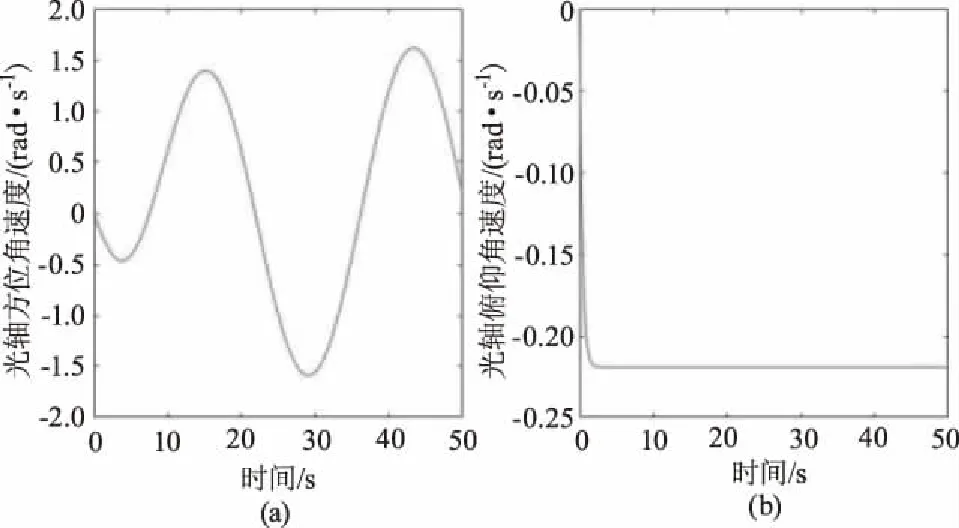
图3 阶跃扰动力矩下光轴方位、俯仰角速度
4.2.2 载机角速度扰动
令载机三轴角速度均为0.01 N·m的阶跃扰动信号,内外框架电机输入电压为0 V,得到光轴方位、俯仰角速度如图4所示。

图4 载机阶跃扰动下光轴方位、俯仰角速度
在载机运动的三轴角速度的影响下,光轴的方位、俯仰的角速度快速受扰后稳定在新的平衡位置。光轴方位角速度、光轴俯仰角速度受扰幅度约为0.01 rad/s。
与框架扰动力矩作用下的光轴角速度相比,载机角速度扰动引起的光轴角速度变化更小,这是因为载机角速度扰动要通过坐标轴投影才能作用到光轴上,而框架扰动力矩是直接作用的。
4.3 内外框耦合力矩特性分析
4.3.1 载机三轴运动内外框架耦合力矩
给定载机横滚、俯仰、方位角速度曲线为正弦波,频率为3 Hz,幅度分别为0.26 rad/s、1.05 rad/s和1.05 rad/s,内外框架电机输入电压为0 V,得到内外框耦合力矩结果如图5所示。

图5 载机三轴角运动时内外框耦合力矩
从图5可以看出,在载机存在三轴运动的情况下,内外框之间存在耦合力矩。这是因为载机运动对内框有耦合作用,内框在横滚和方位方向上均有扰动角加速度,根据耦合力矩的方程可知,此时存在耦合力矩扰动,且耦合力矩的频率和载机三轴角速度的频率相同。
4.3.2 载机三轴运动、内框电机输入时内外框耦合力矩
给定载机横滚、俯仰、方位角速度曲线为正弦波,频率为3 Hz,幅度分别为0.26 rad/s、1.05 rad/s和1.05 rad/s,内框架电机输入电压为1 V,结合4.3.1对比分析内框横滚角速度、内框方位角速度和内外框耦合力矩结果如图6所示,其中实线为内框架输入电压为0 V时的虚线为内框架输入电压为1 V的结果。

图6 载机三轴运动、内框电机控制电压输入时内外框耦合力矩
从图6可以看出,载机三轴运动时,当内框电机加入控制电压,内外框耦合力矩波动幅度变大,这是因为内框电机控制电压加入后,内框产生方位角加速度,内框横滚扰动幅度几乎不变,根据耦合力矩的方程,耦合力矩增大。
5 总 结
两轴两框架光电稳定平台在载机与框架、内外框架之间存在着复杂的耦合关系。从运动学和动力学分析可以看出稳定平台框架角速度主要由外部载机运动角速度投影分量和自身运动角速度组成,框架角加速度受框架转动惯量、电机驱动力矩、内外框架耦合力矩、框架质量不平衡力矩以及其他扰动力矩综合影响。
本文建立了仿真模型,进行了多种状态下动态特性的仿真分析,可知当框架受扰时内框比外框更敏感,内框受扰幅度大于外框,同时内框更快恢复稳定。载机角速度扰动引起的光轴角速度变化比框架力矩扰动引起的光轴角速度变化小。载机存在三轴运动的情况下,内外框之间存在耦合力矩,耦合力矩的频率和载机三轴角速度的频率相同。载机三轴角运动同时内框电机加入控制电压,内外框耦合力矩变大。
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
中国交通信息化(2022年12期)2022-02-11
橡塑技术与装备(2021年12期)2021-06-24
摄影之友(2020年12期)2020-12-23
汽车电器(2018年6期)2018-07-04
中学生数理化·中考版(2017年1期)2017-03-29
火控雷达技术(2016年2期)2016-02-06
幼儿智力世界(2015年6期)2015-08-17
应用光学(2014年3期)2014-06-01
