
RANSAC结合特征线提取在点云逆向建模中的应用
2021-03-07 02:42周东明崔维久高溪溪
矿山测量 2021年1期
王 博,周东明,崔维久,高溪溪
(青岛理工大学 土木工程学院,山东 青岛 266033)
大批古建筑因年代久远致其图纸资料缺失,为当下对古建筑修缮带来困难。传统测量技术通常采用全站仪结合CAD实现古建筑图纸的绘制,随着三维激光技术的快速发展,测绘技术不断的完善,将三维扫描技术结合BIM技术对古建筑进行二维图纸获取并三维重建是对古建筑保护的重要手段之一[1]。文献[2]研究了将RANSAC算法应用在直线拟合中;文献[3]提出了RANSAC算法在屋顶点云面片分割方法;文献[4]研究了地面三维激光扫描技术在古建筑监测中的实施过程;文献[5]利用三维激光扫描技术对古建筑精细化建模及精度进行了分析。
数字化建模是对古建筑进行保护、传承、传播的重要手段之一,但因年代久远图纸缺失给古建筑三维重建带来困难。本文利用三维激光扫描技术结合BIM技术对古建筑进行逆向三维重建,实现了建筑物的逆向三维建模。
1 项目概况
青岛广兴里里院位于易州路、博山路、海泊路、高密路形成的井字交错区域,始建于德国占领时期1897~1914年间[6]。广兴里院落空间开阔,如图1~2所示,东西边长约40 m,南北边长约30 m,户型以2~4户形成连户、公用一个入口为主,少有几户为单门独户,每户空间平均面积约为17.5 m2。院内经历了市场、戏院、电影院、厂房、住宅等建筑功能的变化。目前广兴里建筑各个部分发生了不同程度的老化,但依然是青岛市现存体量最大、保护最完整的里院。青岛市人民政府计划将里院建筑更新保护和空间重构,打造成博物馆等场所,延续青岛里院建筑文化、历史价值。

图1 广兴里

图2 内院东北角
2 数据采集与预处理
由于建筑结构发生了不同程度的老化,接触式测量可能会加快建筑损坏。三维激光扫描测量突破了传统测量的局限性,采用非接触主动测量方法直接获取三维数据。其具有测量速度快,数据精度高,成图直观的优点[7]。本文采用地面三维激光扫描仪拓普康GLS-2000以获取建筑点云数据的形式进行无接触测量。外业扫描采集点云流程图如图3所示,扫描仪设置为6.3 mm@10 m点云间隔,相邻测站间隔10 m~40 m,分别在建筑四周、院内、走廊、室内楼梯间设立测站点,保证扫描建筑数据的完整。

图3 点云外业数据采集流程图
外业扫描结束需要对不同测站扫描的点云数据进行拼接匹配[8]。多幅点云数据通过Scan Master进行拼接匹配形成完整的建筑体。外业扫描的数据拼接完成后可以清晰的看到建筑的物理形体,但不可避免会将和建筑体无关的噪点扫描进去,可通过Geomagic软件对拼接好的点云数据进行去噪与精简,内院扫描点云数据去噪精简对比图如图4所示。

图4 内院扫描点云数据去噪精简对比图
3 建筑物立面及特征线提取
3.1 RANSAC算法原理
RANSAC即随机抽样一致性算法,由Fishier和Bolles提出[9],它通过随机取样找到点云数据中最佳拟合的平面,剔除局外点的影响,生成仅有局内点云数据过程的基本子集。其基本原理为:在进行参数估计时,首先针对具体问题设计一个判断准则,加以区分地对待所有可能输入的点云数据,利用此判断准则通过迭代剔除那些与估计参数不一致的输入数据,最后通过输入正确的点云数据来估计参数。在置信率满足一定要求的情况下,基本子集最小抽样数M与至少抽取一个正确子集概率P满足如下关系:P=1-[1-(1-ε)m]M,式中,ε为数据错误率,m为模型计算需要最小数据量。点云数含有25%错误点RANSAC拟合平面结果如图5所示。
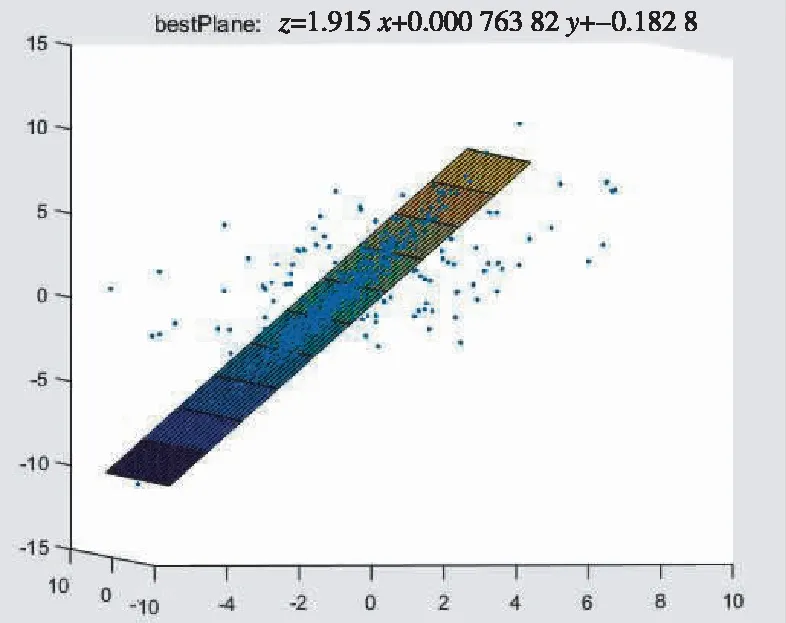
图5 25%错误点云RANSAC拟合平面结果
因建筑表面并不是完全意义上的物理平面,而是具有一定厚度的点云面片,故拟合出最佳平面之后需要保留拟合平面阈值δ0范围内的点云数据,构成具有一定厚度的点云面片,完整的表达建筑立面信息[10]。点云面片提取示意图如图6所示。

图6 点云面片提取示意图
3.2 改进的RANSAC算法进行点云面片提取
广兴里里院外墙体东侧立面点云经过RANSAC算法提取面片如图7所示。

图7 外墙体东侧面片提取图
广兴里5~6 m高度范围点云切片提取图如图8所示。

图8 5~6 m范围点云切片提取图
RANSAC算法能够将建筑物立面点云提取出来,但是该算法判断准则为当前点距拟合平面一定范围内则赋予该面片。然而仅仅利用此判断准则并不能完全保证建筑立面点云提取的准确性,建筑立面点云拟合平面阈值内建筑立面面片和其周围的点云噪点同时存在。
为剔除RANSAC算法提取面片产生的噪点问题,不仅要考虑距离作为判断准则,还必须考虑点之间的邻接关系。通过提取建筑立面的点云的特点分析,点云面片中噪点多为零星分布,建筑实体产生的点云较为密实。基于此,本文采用图形学中R半径密度对零星分布的噪点进一步剔除。R半径示意图如图9所示,其思想为以当前点为圆心,统计该点r半径领域内点的个数rnum。根据RANSAC算法提取建筑立面点云分布特点可知,建筑点云空间领域范围内点云较为密实故rnum值较大,相反噪声点分布稀疏故rnum值较小。设置合适的r半径内点个数阈值r0,通过比较点云各点r半径内rnum与r0的大小,将RANSAC算法提取面片产生的噪点剔除。广兴里里院外墙体东侧立面点云经过RANSAC算法提取面片R半径去噪后如图10所示。
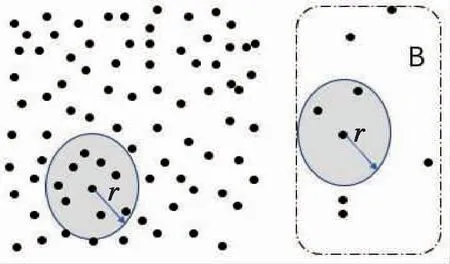
图9 R半径示意图
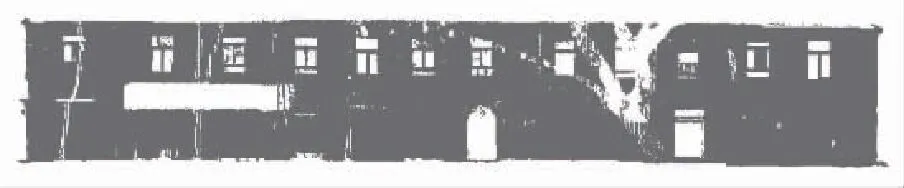
图10 东外墙体面片提取R半径去噪图
3.3 立面特征线提取
RANSAC算法提取去噪后的建筑物主体特征面片特征线边界不明显,点云出现叠加的情况导致提取面片导入CAD不能准确进行点云特征线描取,故在导入CAD前需要对点云数据进行特征线提取。
特征线提取算法原理:对于模型点云P={pi=(xi,yi,zi)∈R3|i=1,2,…,N},计算其他n-1个点到点P的空间距离,并对距离从小到大排序。选取到当前点距离最近的前k个点作为该空间点的k-邻域。
在点云模型中,将当前点pi(xi,yi,zi)的k个邻域点中每次抽取三点A(xj,yj,zj),B(xj+1,yj+1,zj+1),C(xj+2,yj+2,zj+2)|j=1,2,…,k-2,通过三点坐标计算三点所在平面Sj的方程,继而计算点pi到平面Sj的距离dj。点到平面距离如图11所示。特征点到平面距离如图12所示。

图11 点到平面距离示意图
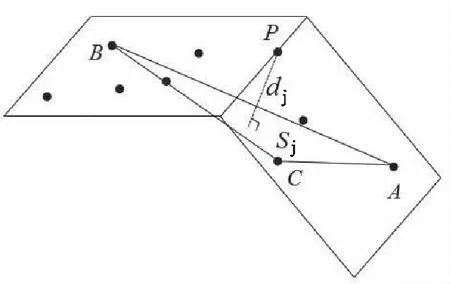
图12 特征点到平面距离示意图


(1)
确定k-邻域后,通过设置合理的阈值dmin,可顺利筛选出特征点。


广兴里里院外墙体东侧立面点云面片经过特征线提取后点云数量明显减少,如图13所示。

图13 外院东侧墙体特征线提取图
3.4 扫描测量值对比分析
三维激光测量与传统测量相比具有精度高、效率高、密度高的特点。选取建筑物部分典型位置提取特征线测量值与实际值进行对比,结果发现误差率小于1‰,如表1所示,符合《工程测量规范》中测量控制要求。
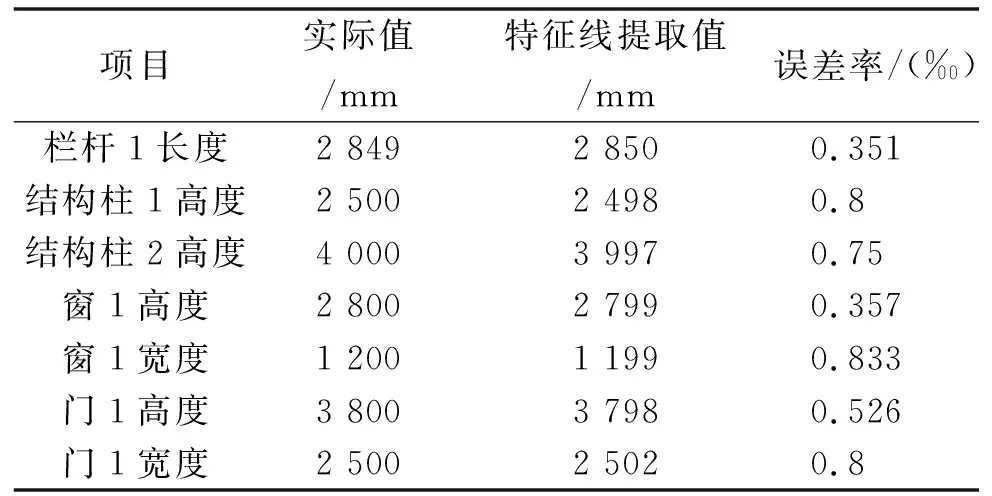
表1 实际值与特征线提取值数据对比
4 建筑三维重构
将经过特征线提取的点云数据经过Recap软件格式转换后导入CAD进行建筑二维图纸绘制。点云数据经过RANSAC面片提取、R半径去噪、特征线提取等过程,部分特征线上的点云被误删,故建筑部分位置需要通过测量原始点云数据辅助特征线的描绘。广兴里里院外墙体东侧立面点云特征线二维图纸绘制如图14所示。图15所示为5~6 m范围内的根据其特征线绘制的二维平面图。

图14 外院东侧立面图

图15 5~6 m范围平面图
将建筑各层平面图导入Revit软件中,标高轴网结合建筑立面图分层创建建筑模型,最后统一链接到同一文件中完成广兴里主体建模工作。广兴里三维模型如图16所示。

图16 广兴里三维模型
5 结 论
针对三维激光扫描仪在建筑逆向建模中的应用,本文提出了一种逆向建模的方法,通过RANSAC提取出原始点云数据中建筑点云面片,经过R半径去噪和特征线提取可在CAD中绘制建筑二维图纸进而在三维软件中重构三维模型。但文中利用R半径算法对所获取的点云面片进行去噪时无法完全识别紧贴建筑立面的噪声点,对此类噪点的处理需要继续研究,以满足更高精度的要求。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
文物鉴定与鉴赏(2022年6期)2022-05-27
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
建材发展导向(2021年7期)2021-07-16
语数外学习·高中版中旬(2020年3期)2020-09-10
视野(2018年18期)2018-09-26
饮食科学(2016年5期)2016-07-05
饮食科学(2016年5期)2016-07-05
幸福家庭(2016年3期)2016-04-05
饮食科学(2014年10期)2014-10-29
