基于遗传算法的六足机器人控制系统
2021-03-07 09:13:00卢鑫郭婷谭越洋
电子技术与软件工程 2021年19期
卢鑫 郭婷 谭越洋
(深圳信息职业技术学院 广东省深圳市 518000)
1 引言
1.1 六足机器人的产生背景
由于当前人们对于机械设备的要求仍在不断提升,因此运动速度快且稳定性高的设备需求量极高,以往的机器人设备多位轮式或者履带式,不仅运动能力不强,且在面对复杂地形是会受到非常多的限制,因此更加灵活化与智能化机器人的研发已经成为重中之重。根据科学研究资料,自然界当中多足昆虫对于自然环境的适应能力极强,为使得机器人同样具备强适应能力,进而能够在各种复杂定性当中稳定运动,设计出了六足机器人以模拟自然界当中的多足昆虫。六足机器人可以广泛应用于地震、火灾等各种危险场合,并以其稳定的运动能力在此类环境当中发挥重要作用。多足机器人在最初设计时便是模仿蜘蛛的运动形态以及基本外形结构,使用舵机来进行类似蜘蛛行动方式的机器人动作控制,以使得机器人能够进行稳定移动。多足机器人的足数一般情况下会超过四个,六足机器人便是其中一种,足数为六,与蜘蛛形态非常相似。随着科学技术的不断进步,六足机器人的整体控制系统也在不断地优化过程当中,在复杂地形当中的运动速率以及机械稳定性均获得了大幅度提升。
1.2 六足机器人的技术优势
在多足机器人出现之前,传统的轮式结构机器人以及履带式机器人占据了大部分市场,并以其结构简易、摩擦力强、牵引力大的优势在各个领域取得了广泛应用,尤其在平坦的道路上,该类机器人能够最大程度的发挥其运行功效,不仅具有非常高的运动速率,还能够始终保持较高的运行效率,能够在应用场合当中起到非常有效的作用,然而一旦面对复杂地形,以上传统机器人的优势便已经不再明显,因此为满足当前市场对于机械设备的高性能需求,六足机器人的研发很好的解决了这一问题。多足机器人不仅能够在极短时间内迅速适应地形,还能够在地势较为陡峭的地区始终保持稳定运行,在面对特殊任务或者危险环境时,多足机器人能够发挥非常良好的效用,在此类环境当中占据着无法代替的重要作用。六足机器人的运动能力非常强大,在恶劣环境当中依然能够发挥出非常优秀的运动能力。这主要是由于六足机器人仿照蜘蛛的生理结构进行外形设计,因此在基本结构特性与前进行为方面与蜘蛛非常相似。由于该类机器人同地面的接触面积非常小,因此在行进过程当中的着力点非常容易确定,按照三角步态、四角步态等方式均能很好的完成任务。除了极强的运动能力之外,六足仿生机器人的稳定性也是一大优势,这一稳定性使得该类机器人能够广泛应用于国防事业,为危险情况的人员搜寻等措施提供基本的设备保障,有着十分深远的意义。
1.3 六足机器人的整体结构控制
六足机器人共有六个脚,并且这六个脚在设计时并不是对称式结构,而通常选用均匀分布的结构形式,这是因为若机器人结构选择对称式结构,那么在实际运行时舵机非常容易产生相互碰撞的现象,导致机器人的使用性能受到较为严重的影响。该类型机器人的典型步态分为三角与四角。三角步态是指机器人一边的前后足同另一边的中组协同运作,组成三角结构,支撑时共有三足,而进行摆动时则需要三足。四角步态与三角步态有较大区别,四角步态将六足按照两两一组的形式进行划分,共为三组,支撑需要用到四足,而在进行摆动时总共只需要用到两足,因此四角步态运动过程中更加稳定,而三角步态的运行速度则会相对较高。
2 六足机器人控制
2.1 建立六足机器人模型
对六足机器人进行模型的具体构建,主要应用的设计软件为Solidworks。该软件在完成模型构建时,主要应用了其3D打印功能,使用强度非常高的光敏树脂来对六足机器人的各个身体部位例如腿、关节等构件进行打印。由于六足机器人的形态特征,其工具有18个自由度,因此在舵机的选择上应满足大扭矩的特征,本次设计选用MG996R型PWM舵机,该舵机的扭矩数值为13kg/cm,完成舵机控制的核心部件为STM32F407单片机以及控制板,另外该单片机还可以控制各类传感器完成避障功能,红外避障、倾角仪等高性能传感器均由单片机进行指令输送与控制。对于舵机控制板进行供电的电源选择7.4V锂电池,这一电源容量极大,能够满足长时间、多周期的系统供电需求,保障六足机器人在运动时不会出现电力不足的故障。为保持机器人在运动过程当中的稳定性,六足机器人主板上要分布控制系统的核心模块:STM32单片机、红外避障模块、大容量电池以及超声波设备。
2.2 机器人控制系统搭建
对六足机器人进行运动控制系统搭建,当前采取的主要方式便是上位对下位设备进行控制的方式,上位机由PC机构成,下位机由舵机控制板以及STM32单片机共同组成。上位机的主要功能是基于PC机设备进行六足机器人的运动控制系统设计,完成软件上机界面的设置,而下位机的主要功能则是进行避障与步态运行算法的写入,对六足机器人进行控制,以最终实现机器人自主行走的功能。上位机与下位机之间需要进行通讯,一般情况下选择串口通信作为两者之间的连接方式。STM32单片机直接向上位机完成舵机反馈电流的输送,由此上位机便可以通过反馈电流的情况对机器人进行优化,利用遗传算法最终找到最优解。得到全局最优解之后,上位机便可以再次通过串口将数据信息重新返回到STM32单片机当中,最终保障六足机器人运动状态发生对应的变化。
2.3 机器人运动学分析
仿真六足机器人外形与蜘蛛非常相似,是按照自然结构中的多足形态进行仿制最终得到的机械设备,从运动学角度进行分析,忽略掉多足结构末端的非必要部分,仅仅从多足结构的关节处的运动形态以及转动角度进行分析,可以利用链式坐标的方式,将整体结构利用矩阵形式进行表现。
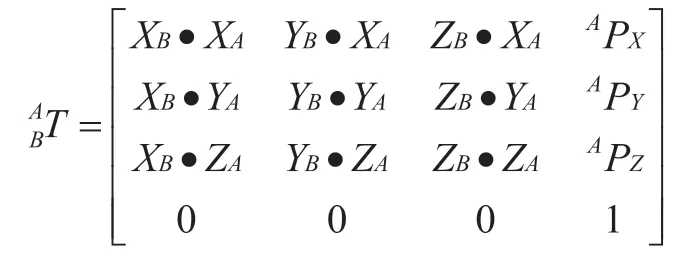
在该矩阵当中,A与B分别代表参考与相对坐标系,P的含义为相对坐标系与参考坐标系之间的相对位置向量,而R则代表着相对坐标系针对于参考坐标系的旋转矩阵,用以描述六足机器人关节处的旋转角度。X、Y、Z分别代表着各个坐标轴当中的位置基向量,另外矩阵的最后一行表示着比例系数。由以上矩阵经过多次变换,便可以最终得到末端执行器与坐标系之间的位置关系,从而以此为根据建立起六足机器人的运动学方程。对于本设计当中的机器人,共有六足,首先针对其中一条腿展开分析。将该位置定舵机的向右方向指定为坐标系的x轴正向,而将定舵机向外的方向指定为y轴正向,旋转角度以顺时针为正方向。由以上规定,画出六足机器人的腿部简化模型如图1所示。
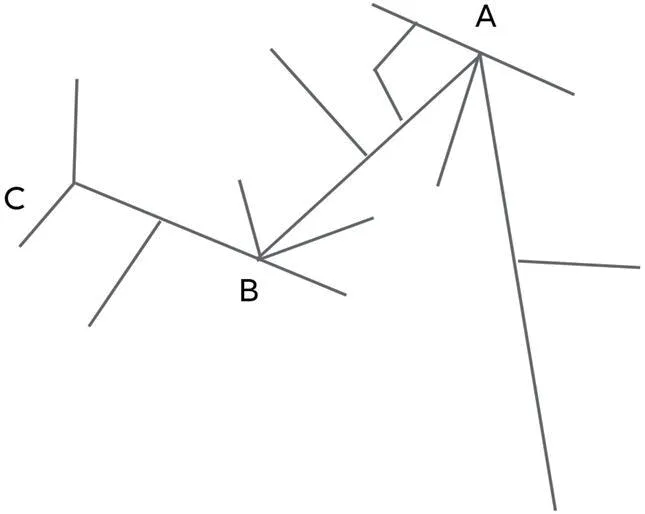
图1:六足机器人腿部简化模型图
3 六足机器人控制系统上机软件设计
3.1 基于遗传算法的步态优化
遗传算法是指对于复杂系统的适应型优化方式,来源于生物遗传学以及进化学,通过对生物界当中的自然选择以及遗传学内容进行模拟,按照复制、变异等生物现象得出优化系统的最优解。遗传算法的主要流程是首先由一个任选的种群开始,模拟自然选择进行交叉、复制、变异等情况的选择,而后在选择完成之后逐渐形成能够适应于当前环境的个体,进而使得种群能够进化达到更易搜索的空间区域,在此区域内开始有个体的繁衍生息,最终形成一个群体,在最优的环境完成个体的生存,即得到问题的最优解。
MATLAB的工具箱当中便有遗传算法的应用工具,因此可以用于六足机器人的控制系统设计。MATLAB软件能够以一种通用框架来解决多目标、模型复杂、非线性的系统进行最优解的求解,因此非常适用于解决六足机器人步态控制力不足的问题,并针对系统展开优化操作。在进行步态优化时,首先针对上位机产生的舵机反馈电流完成力矩大小的估量,并将该力矩数值作为初始种群,进而应用到遗传算法之中,进行选择,而后再完成编码,交叉和变异,最终根据得到的结果进行解码,便可以最终得到系统优化完成之后的最优解。
3.2 控制系统上机界面设置
在进行六足机器人控制系统上机操作时,应当使用MATLAB软件当中的APPdesigner工具,并应用该工具完成上机界面的设置。该上机界面总共设置有两个面板,其中第一个面板的主要功能是对所使用的遗传算法步骤进行相应的显示,第二个面板为控制面板,主要功能是直接进行与机器人之间的连接并对连接到的机器人进行行为控制,根据电源频率的不同实现六足机器人运动速度的变化,直接调节电源频率便可以实现六足机器人步态的控制与调整。
4 控制结果测试
对控制系统的优化结果进行测试,首先应当选取两种不同的地形,然后再根据六足机器人在这两种地形当中的运动情况进行记录与分析,性能测试结果如表1所示。

表1:六足机器人在不同地形当中的运动性能测试结果
由表1可以明显观察得到,引入步态优化之后,六足机器人的控制系统性能大大提升,机器人的运动速率以及性能稳定性均获得了大幅度的提升。
5 结语
通过对六足机器人的运动控制系统进行设计优化,可以明显看出经过优化后的机器人不仅在运动速度方面进步显著,并且在面对较为复杂的地形,其运动稳定性也能够有所保障。由单片机设备与MATLAB应用软件共同完成基于遗传算法的系统设计优化,使得六足机器人舵机的使用寿命获得延长,并且为各类多足机器人设备提供了优化设计的经验与参考。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
电子制作(2018年1期)2018-04-04 01:48:14
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
制造业自动化(2017年2期)2017-03-20 14:26:08
智能系统学报(2015年4期)2015-12-27 09:38:39