利用地面LiDAR 精细化测量活断层微地貌形态
——以毛垭坝断裂禾尼处断层崖为例
2021-03-05 02:16:08李家存吴中海刘绍堂
地质力学学报 2021年1期
张 迪 李家存 吴中海 刘绍堂 卢 燕
1. 首都师范大学资源环境与旅游学院, 北京 100048;2. 河南工程学院土木工程学院, 河南 郑州 451191;3. 中国地质科学院地质力学研究所, 北京 100081
0 引言
典型第四纪地貌体的高精度测量是活断层定量研究的基础, 断层活动的最新证据往往是通过这些微地貌形态刻画出来的。 通过分析活断层的典型微地貌形态, 可估算断层位移量, 重构断层破裂历史, 揭示断层的活动习性, 这对量化断层的活动强度、 评价区域内地震的危险性及复发性具有重要意义 (刘静等, 2013; He et al. , 2016;Wei et al. , 2019; 唐毅, 2019; 肖坤泽和童亨茂,2020)。 传统的测量方法受地质环境、 数据采集密度和效率、 数据精度等因素影响, 已无法满足活断层研究中对精细化空间数据的要求。 随着遥感技术的发展和遥感影像分辨率的不断提高, 提供了从宏观角度研究活断层形态分布与空间展布的方法; 然而受遥感影像分辨率的限制, 难以刻画出活断层上构造微小的地貌形态且无法获取垂直方向上的地表变形数据 ( 付碧宏等, 2008;Arrowsmith and Zielke, 2009; 张景发等, 2016)。
激光雷达扫描技术 ( Light Detection And Ranging, LiDAR) 具有数据采集效率高、 高分辨率和非接触测量等优点, 可深入复杂、 危险环境中快速、 高效地获取断层微地貌形态, 实现复杂地质条件下断层微地貌形态的高精度三维重现, 并为活断层研究提供多样化的测绘数据产品, 如数字表面模型 (Digital Surface Model, DSM)、 数字高程模型 (Digital Elevation Model, DEM) 和等高线等, 这为活断层微地貌形态识别与量化提供新的技术方法 (马洪超, 2011; Oskin et al. , 2012;任治坤等, 2014; 马晓雪等, 2016; Ren et al. ,2018)。 目前, 基于LiDAR (主要是机载LiDAR 和地面LiDAR) 的活断层应用研究主要集中在以下四个方面: ①地表破裂三维重建及断错微地貌的精细化测量 (Kayen et al. , 2006; Gold et al. ,2012; 袁小祥, 2012; 刘静等, 2013; 魏占玉等,2014; 谭锡斌等, 2015; Wilkinson et al. , 2015;刘宇平等, 2016; 康帅等, 2017); ②震间变形监测 (Wilkinson et al. , 2012; Gold et al. , 2013);③古地震探槽剖面数字化测量 (郑文俊等, 2015;李占飞等, 2016); ④断层面形貌变化的高精度测量 ( Renard et al. , 2006; 魏 占 玉 等, 2010;Candela and Renard, 2012)。 相对于地面LiDAR 技术, 机载LiDAR 具有数据获取成本昂贵、 数据采集及处理专业性较强等特点, 比较适合开展大范围内、 大尺度上的活动构造形态识别与量化研究(马洪超等, 2008; 马洪超, 2011; Oskin et al. ,2012; 佘金星等, 2018), 国内的大多数研究机构一般不具备开展机载LiDAR 测量的条件; 而地面LiDAR 具有操作简单、 数据采样密度高和精度高等优点, 可实现一定范围内复杂地质条件下活断层典型地貌体的精细化测量, 重建断层微地貌真三维模型, 进而划分和识别地貌单元, 并对断层微地貌的重要特征参数进行测量分析。
文章以川西理塘毛垭坝盆地北缘正断层崖为研究对象, 详细介绍了利用地面LiDAR 的断层崖微地貌的数据采集及处理流程, 建立了断层崖高精度的数字高程模型和真三维地表模型, 并分析了正断层崖的地貌特征, 计算出正断层错动两期最新地貌面的精确垂直位错量, 为利用地面LiDAR技术精细测量活断层典型微地貌体形态提供了方法参考。
1 研究区概况
毛垭坝断裂位于理塘左旋走滑活动断裂带北西段, 顺无量河上游, 沿大、 小毛垭坝盆地北缘发育, 整体上近西东向展布, 是控制着大、 小毛垭坝断陷盆地发育的主边界断裂 (图1; 周春景等, 2015; 白永健等, 2019)。 在遥感影像上沿毛垭坝盆地北缘山前地带展布, 并依次形成断层崖、断层三角面和冲-洪积扇等断裂展布的线性标志,均指示该断裂活动性显著。 另外, 地质调查中在318 国道上二四九工班的西侧发现巨型崩塌滑坡体, 其水平距离可达4 km, 前后缘高差约为750 m, 这显然指示此断裂带上发生过大地震活动。 目前学界对毛垭坝断裂的活动性质仍有不同认识, 主要争议在该断裂为逆断层性质还是典型的正断性质 (马丹等; 2014; 周荣军等, 2015;徐锡伟等, 2015; 吴中海等; 2015; Chevalier et al. , 2016)。 从卫星遥感影像上可清晰分辨出a 处为断层垂直错断山前冲积扇形成的断层崖 (图1),流经断层的冲沟在断层下盘呈羽状展布 (图2a),b 处为整齐排列断面均倾向盆地的断层三角面和断层垂直切割山前冲积扇的形成断层崖 (图1, 图2b)。 c 处断层上升盘处为两级冰水台地, 断层下盘处存在明显的地堑和地垒构造 (图1, 图2c)。在数据采集点洞玉沟沟口处 (图1 中的红色区域,图2d) 存在阶梯状的断层崖发育, 这些典型的构造地貌均表明毛垭坝断裂具有正断性质。
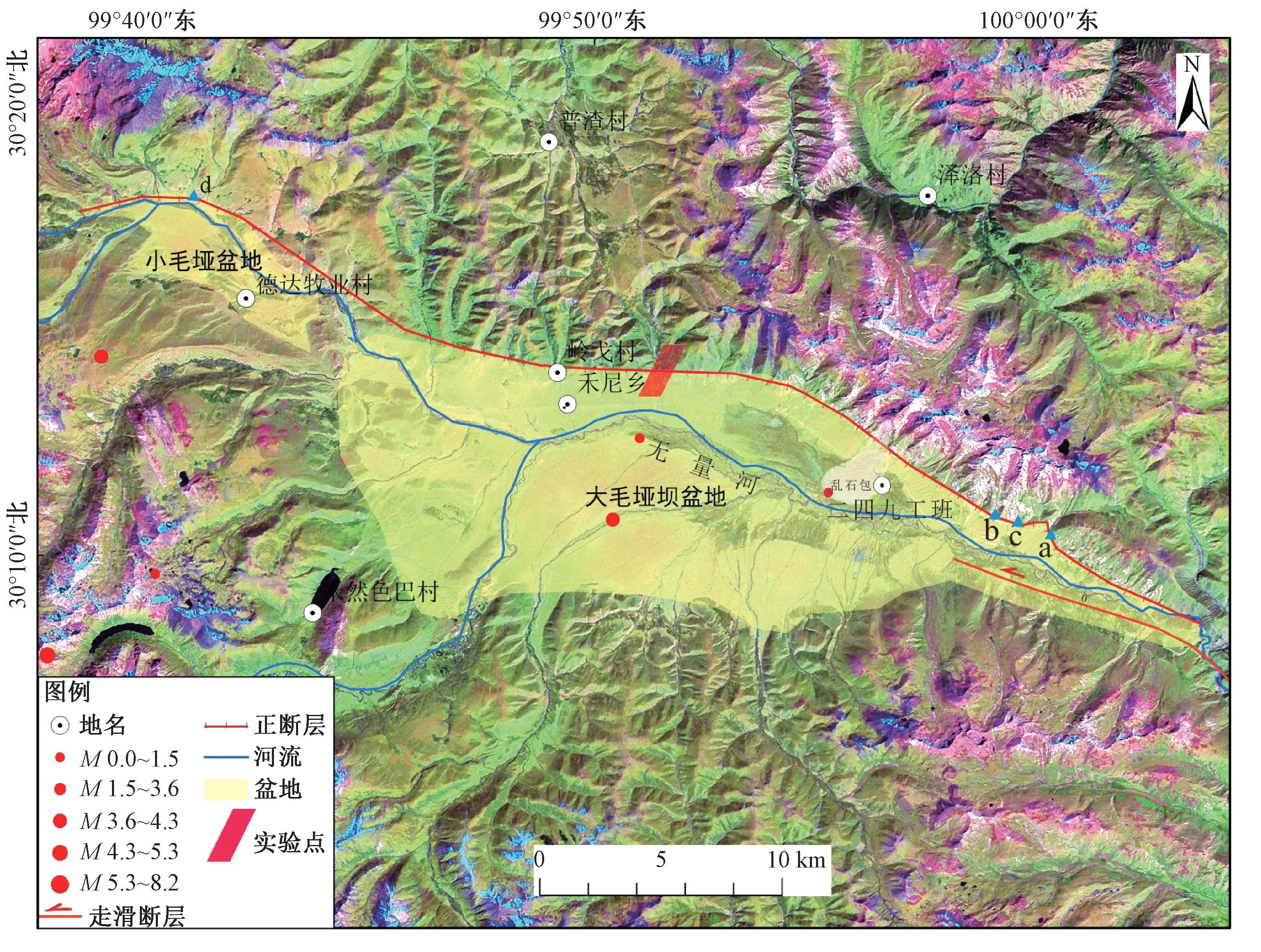
图1 毛垭坝断裂几何展布Fig.1 Geometric distribution of the Maoyaba fault
实验点位于毛垭坝盆地北缘禾尼乡洞玉沟沟口处 (30.23°N; 99.86°E), 海拔约4100 m。 此处存在两级阶梯状的断层崖, 整体地貌全景图如图2d。 断层崖地貌形态清晰, 两阶梯断层崖T1和T2高差明显, 适合开展地面LiDAR 的数据采集实验。
2 数据采集与处理方法
2.1 数据采集
研究选择FARO 公司生产的Focus3D X 330 型地面三维激光扫描仪进行数据采集, 系统主要由激光测距系统、 扫描仪旋转平台、 内置高分辨率相机、 软件控制平台、 附属配套设备及后处理软件等组成, 此类型的激光扫描仪高度集成、 体积小、重量轻且操作简单, 其最大扫描距离为330 m, 点云密度较高且扫描精度可达到毫米级 (测距10 m和25 m 时误差为±2 mm), 满足复杂地质环境下高精度地形测量的要求 (图3)。 数据采集流程主要包括工作路径规划、 扫描站点布置、 扫描站点之间的靶球放置、 扫描参数设置和控制点绝对坐标的获取 (图4)。 根据断层崖的分布范围和地形条件, 现场勘察后规划出最佳扫描路径并布置扫描站点。 受采集区域地面植被反射率的影响, 地面三维激光扫描仪的实际测量距离值往往小于理论值, 为保证扫描范围涵盖整个采集区内详尽的地形特征, 此次数据采集共设置28 个站, 通过站与站之间放置的靶球 (3 个或3 个以上) 来配准点云, 进而实现所有站点云的整体配准。 地面三维激光扫描仪在获取精确空间形态时, 内置的高分辨相机也同步获取彩色纹理信息。 为便于和其他遥感数据进行协同分析, 需将整体配准后的点云从相对坐标系转换到大地坐标系下, 文中采用高精度GPS 静态同步观测3 个或3 个以上控制点的方法实现点云从相对坐标系到绝对大地坐标系的转换。
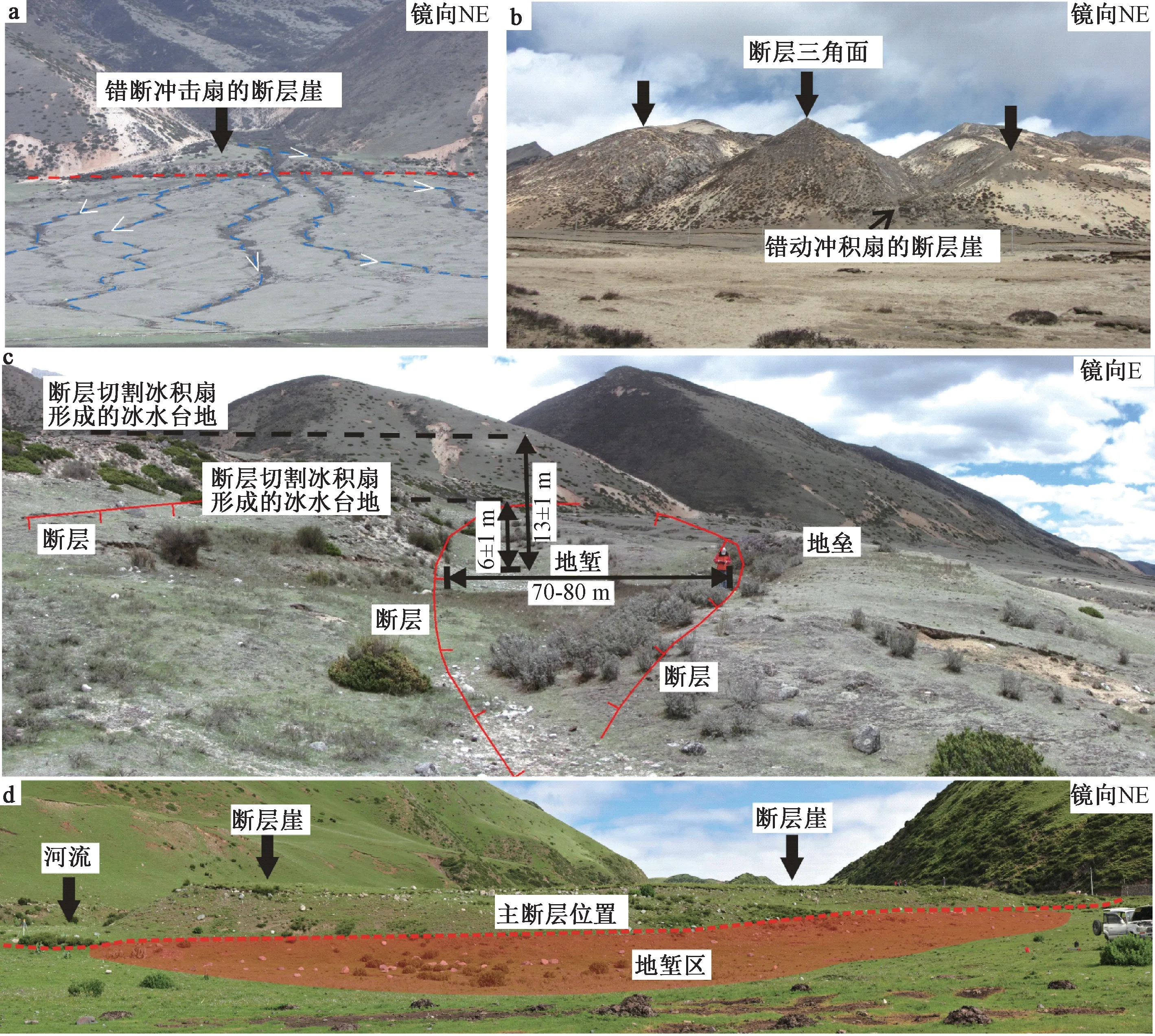
图2 毛垭坝断裂地貌特征与实验点地貌Fig.2 Geological features of the Maoyaba fault and geomorphologic environment of the study area
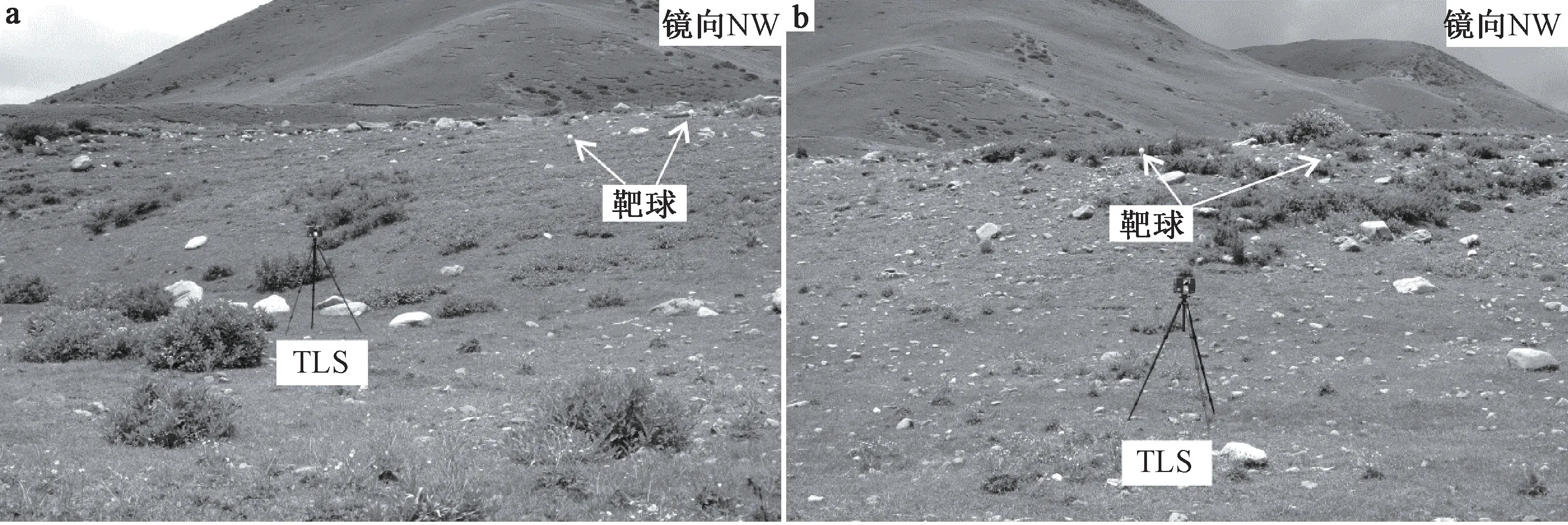
图3 地面三维激光扫描仪数据采集方法Fig.3 Data acquisition using TLS
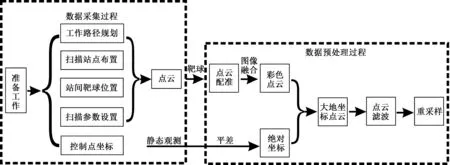
图4 地面三维激光数据采集与预处理流程图Fig.4 Flow chart of the TLS data acquiring and processing
2.2 数据预处理
点云数据预处理过程主要包括点云配准、 彩色点云生成、 坐标转换、 点云滤波和点云重采样(图4), 其中点云配准、 彩色点云生成和坐标转换可通过激光扫描后处理软件Faro scene 6.2 完成,而点云滤波、 重采样及不规则三角构网建模则是在软件Geomagic Studio 中完成。 由于受研究区范围、 地形遮挡影响以及扫描仪最大测量距离限制,单站式扫描无法实现断层崖全方位地表信息的测量, 需采用多测站扫描通过后期点云拼接才能获取完整的三维空间数据。 以首站点云为起始站,借助站与站之间靶球在软件Faro scene 6.2 中可自动完成两站点云之间的配准, 进而将28 站点云都拼接到同一相对坐标系下实现点云整体配准 (图5)。 由于扫描视角的限制, 图上缺失点云的白色圆形区域为地面三维激光扫描仪测站所在位置。原始点云仅包含距离、 角度和反射强度信息, 将纠正后的数字图像与点云进行融合, 即将图像上彩色信息精确赋予到对应的点云位置以生成真彩色的三维点云, 从而丰富点云特征, 增加反映断层崖的地表信息量。 由于受设备系统内部因素和研究区内植被、 较大石块和车辆等环境影响 (图2, 图3), 地面三维激光扫描仪在数据采集过程中不可避免地会产生噪声点, 需进行点云滤波。 针对断层崖周围比较明显的散点及空中漂浮点, 可采用手动方法直接删除; 而对于地面上的植被和较大石块等噪声点, 选择最大局部坡度滤波法通过不断设定坡度阈值来实现噪声点消除, 滤波前后效果如图6。 多站拼接后的点云中包含重叠区域, 若直接进行三角构网建模, 既占用大量的计算机资源, 也会增加构网拟合算法的难度, 同时也降低了模型构建效率。 因此, 在保证曲面重构精度的前提下, 需对点云进行重采样处理, 以剔除冗余数据, 降低点云密度, 提高三维模型重建效率。

图5 配准后点云图Fig.5 Point cloud image after registration
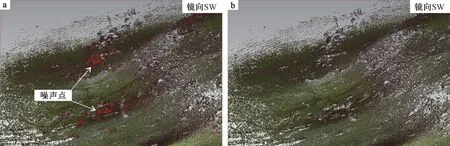
图6 点云滤波效果图Fig.6 Point cloud image after filtering
3 三维模型及定量分析
3.1 三维建模效果
数据预处理后的点云可通过软件显示 (图7a、7b), 点云中空白部分为测站点和地面植被、 石块滤波后的区域。 由于点云是不连续的离散点, 从图7a、 7b 上难以直观识别出断层崖的地貌特征及细微地形变化, 也无法进行定量分析。 因此, 为更加形象、 直观地分析断层崖的地形地貌特征,在软件Geomagic Studio 中对点云进行不规则三角形构网 (图7c、 7d), 其中图7c 为分辨率为0.05 m 的DEM, 而图7d 为纹理贴图后的真彩色三维模型。 相对点云图, DEM 和真彩色三维模型图为连续曲面, 随着地形的起伏变化, 三角面形状、大小和密度也会随着采样点的位置和密度而发生变化, 由空间采样点和断线组成的不规则三角面可将复杂的地形特征更精确真实地表达出来, 并对地貌、 地形和地表变形精细特征进行多视角分析。

图7 断层崖三维建模效果Fig.7 3D modeling of the fault scarp
3.2 断层崖的地貌特征
地面LiDAR 可实现断层崖微地貌形态的高精度三维重现, 构建了分辨率为0.05 m 的DEM 和真彩色三维模型, 这为活断层微地貌地表变形及断层空间分布的准确识别与量化提供了高精度基础数据。 活断层经过区域往往伴随着地貌形态变化,如地表破裂、 断层崖、 断层三角面和水系形态变化等, 通过地貌形态特征参数的提取可确定出断层的位置及走向。 断层崖的坡度图 (图8a) 是将断层崖上坡度变化用不同颜色绘制, 红色区域表示坡度较大区域 (坡度值一般在22°以上), 即地貌形态变化较大; 而蓝色区域则表示坡度较小区域 (坡度值在5°以内), 即地貌形态变化较小, 通过坡度图可清晰识别出断层崖微地貌变形区域。断层崖的等高线图中等高距为0.5 m (图8b), 断层崖微地貌地形变化可通过等高线的密集程度清晰表示 (图8b)。 将坡度图与等高线图的叠加 (图8c), 综合坡度和等高线变化可完成对断层崖地貌形态的解译, 此断层崖近西东向发育, 存在阶梯状断层崖 (T1和T2), T1和上盘交界区存在明显地表破裂 (图8d), 这清晰指示出区域内断层位置和走向。 由于断层活动的非均匀性, 两断崖在垂向地貌特征差别明显, 断崖T1地表变形较小, 与上盘交界处存在明显地表破裂 (图8c 中白色虚线区域), 而断崖T2地表变形较大且分布范围较大,断崖T2西部形态保留较好, 东部可能受自然或人为破坏, 形态发生一定程度变化。 断层近西东向依次错断冲积扇形成断崖T1和断崖T2, 并在断层上盘存在地势较低的凹槽型区域, 初步判定为地堑区 (图8d)。

图8 断层崖地貌特征分析Fig.8 Slope maps and contour maps of the fault scarp
3.3 垂直位错量确定
由于受地壳构造活动的持续作用以及外界环境因素影响, 如长期风化、 侵蚀和沉积作用, 使断层上下盘的地形发生变化, 导致断层上下盘的分界难以识别。 为最大程度上减少断层崖垂直位错量的计算误差, 在高精度DEM 上横跨活断层方向依次提取6 条地形剖面进行分析 (图8d、 图9), 其中剖面1 和2 为T1断崖处的垂直位错剖面,剖面3 和4 为T2断崖左侧的垂直位错剖面, 剖面5和6 为T2断崖右侧的垂直位错剖面。 在剖面1 和剖面2 上水平距离12 ~22 m 范围内高程值发生明显变化, 且两侧坡度基本一致, 以12 m 和22 m 作为断层崖上盘与下盘分界, 剖面1 和剖面2 拟合后的垂直断距分别为1.1 m 和1.16 m, 因此T1断崖处的平均垂直抬升量取两剖面的平均值为1.13 m。同理, 剖面3 和4 在水平距离12 ~45 m 范围内高程值发生明显变化, 以12 m 和45 m 作为此处断层上下盘分界, 拟合后的垂直断距分别为6.3 m 和6.4 m, 以平均值6.35 m 作为T2断崖左侧处的垂直断距。 剖面5 和6 为T2断崖右侧处的二维地形剖面, 以水平距离10 m 和48 m 作为此处上下盘分界, 拟合后的垂直断距分别为 6.1 m 和5.55 m,取平均值5.83 m 作为T2断崖右侧处的垂直断距。综合T2断崖左侧和右侧的垂直断距, 以两处的平均值6.09 m 作为T2断崖的垂直断距, 与T1断崖处的垂直断距相比, T2断崖左右两侧的垂直断距拟合结果不一致, 主要是由于T2断崖的分布范围较大, 地表地貌形态分布不均匀。
4 讨论
地面LiDAR 具有操作简单、 数据采集效率高、高分辨率和非接触测量等优点, 可快速、 高效地实现复杂地质条件下活断层典型地貌体的高精度三维测量, 更加直观、 形象地识别厘米级甚至是亚厘米级的地貌构造形态, 为活断层微地貌形态精细化测量及地貌特征参数量化提供有效的技术手段。 与无人机摄影测量技术相比, 地面LiDAR技术可去除植被等噪声信息, 揭示普通光学影像无法获取的活断层地貌构造信息, 特别适合复杂地质条件下有限范围内的活断层典型地貌体精细测量与分析。 但受采集区域地面植被等因素影响,地面LiDAR 的实际测量距离值往往小于理论值,为避免测量过程中遗漏信息, 数据采集过程中要充分考虑研究区范围、 地形遮挡以及扫描仪最大测量距离限制等。 另外, 点云滤波中非地面点的去除直接关系到后期三维模型建立的精度, 应根据研究区地物实际情况选择合适的滤波算法。
综合分析三维模型、 坡度图和等高线图, 可明显识别出此探测点为阶梯状断层崖, 近西东向发育, 在断层上盘存在地堑区, 两断层崖地貌特征差别明显, 断崖T1地表变形较小, 存在明显地表破裂; 而断崖T2地表变形较大且分布范围较大,断崖T2左侧形态保留较好, 右侧可能受自然或人为破坏, 形态发生一定程度变化。 根据沿两断层崖依次提取的6 条地形剖面, 计算出了两断层崖的垂直位错量分别为1.13 m 和6.09 m。 断崖T1分布比较均匀且地表变形较小, 利用剖面1 和2 计算的垂直位错量基本一致。 断层T2分布范围较大且地貌形态变化较大, 断层面坡度较大, 断崖左侧上下盘分界明显, 可明显识别出主断层位置; 由于受自然或人类活动等因素影响, 断崖右侧地貌形态变化明显, 断层面分为两部分, 坡度较小, 上下盘分界不清晰, 导致剖面3, 4 与剖面5, 6 垂直位错量结果不一致。 对于地貌形态变化较大断层崖垂直位错量获取, 可选取多组二维地形剖面进行拟合计算。
5 结论
利用地面LiDAR 技术重建了川西理塘毛垭坝断裂禾尼处断层崖的高精度三维模型, 详细介绍了数据采集及处理方法, 验证了地面LiDAR 在活断层典型地貌体的精细化测量上的有效性和实用性, 并获得以下初步认识:
(1) 经过点云配准、 滤波、 重采样和三角形构网处理后, 建立了0.05 m 分辨率的数字高程模型和真彩色三维模型, 综合坡度图和等高线图分析了断层崖的地貌特征, 并获取了川西理塘毛垭坝断裂禾尼处正断层错动两期最新地貌面的精确垂直位错量分别为1.13 m 和6.09 m。
(2) 地面LiDAR 技术可为研究活断层的地貌和形变演化提供精细的基础数据, 将有助于进一步定量或半定量分析断层崖的几何学、 运动学和动力学特征, 为活断层微地貌高精度三维重现提供重要方法。
猜你喜欢
睿士(2023年3期)2023-03-22 08:35:38
——工程地质勘察中,一种做交叉剖面的新方法
中国设备工程(2021年2期)2021-01-28 07:51:10
电子测试(2017年12期)2017-12-18 06:35:46
记者观察(2017年7期)2017-11-30 16:46:04
北京航空航天大学学报(2016年6期)2016-11-16 01:50:44
中国卫生(2014年5期)2014-11-10 02:11:32
河南科技(2014年18期)2014-02-27 14:14:52
河南科技(2014年7期)2014-02-27 14:11:06
地震研究(2014年3期)2014-02-27 09:30:50
城市地质(2013年4期)2013-03-11 15:20:53