
基于CAV444的无接触式电容角度传感器
2021-03-03 09:16秦玉伟胡涛成
河南科学 2021年1期
秦玉伟, 胡涛成
(1.渭南师范学院物理与电气工程学院,陕西渭南 714099; 2.天津工业大学 电气工程与自动化学院,天津 300387)
角度传感器广泛应用于仪器仪表制造、液体成分分析、厚度测量以及坡度检测等诸多领域[1-4]. 常见的角度传感器有非绕线电位器式、自整角机式、霍尔式、电解式、电容式等几类[5-8]. 电容式角度传感器具有结构简单、能耗低、动态响应速度快和稳定性好等优点[9-11]. 传统的电容角度传感器利用极板相对面积的改变实现角位移的测量,受外部环境影响大、输出线性度低;结构设计上,通常在传感器产生相对角位移的两块转动极板引出电极,测量角度范围受限,测量过程容易造成接触不良,引起电气故障[12-16]. 为了克服上述缺陷,设计了一种区别于传统的电容角度传感器,并采用CAV444芯片进行信号处理,可实现真正意义上的无接触式的角度测量,能够提高传感器的可靠性以及性价比,减少周围电路和工作环境的影响,延长传感器的使用寿命.
1 结构设计
传感器由极板A、极板B、转轴和屏蔽外壳等部分构成,其中A、B极板由特殊处理的两块覆铜板构成,且平行放置,极板间距极小. A、B极板阴影部分为覆铜,覆铜部分两个张角为90°扇形,其余部分经腐蚀处理,无覆铜,结构如图1所示.
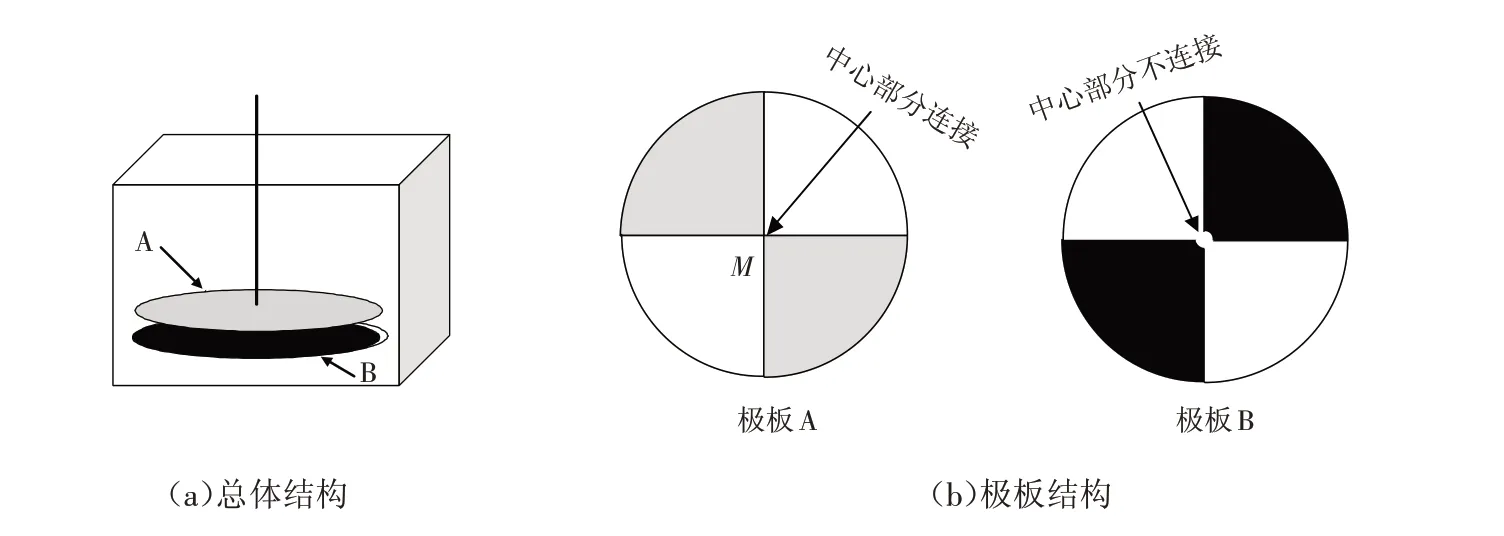
图1 角度传感器结构Fig.1 Structure of the angle sensor
动极板A中心部分连接(连接点为M)电极线,其背部固定转轴并通过轴承连接;定极板B 固定在屏蔽外壳底部,中心部分不连接,两电极分别从其的两端引出. 传感器屏蔽外壳由覆铜板组成,上部开口嵌入轴承,并引出转轴,通过转轴使动极板A产生角位移. 通过改变极板的相对面积来改变电容值,从而就可以计算出旋转的角度. 该结构可以等效为两个电容C1、C2的串联,如图2所示.
通过对等效电容值的检测,就可以得知传感器的角度变化值. 该无接触式电容角度传感器的结构进行了优化,两根引出线固定不变,减少了机械摩擦,提高了测量精度和传感器的使用寿命,增强了系统稳定性.
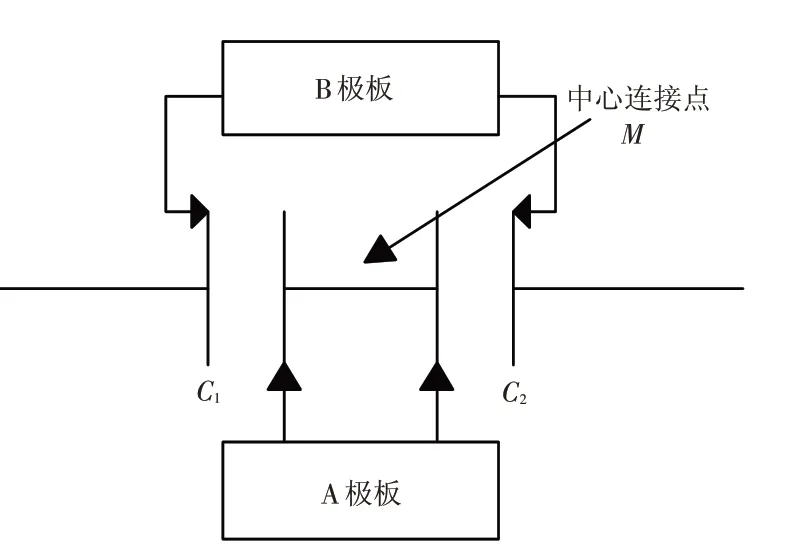
图2 等效电路Fig.2 Equivalent circuit
2 工作原理
当旋转动极板A时,动极板A和定极板B之间的相对面积会发生改变,传感器等效电容值发生相应的改变. 当两个相互平行的极板A、B接近于无限大的时候,可以忽略其边缘对传感器自身造成的影响[17-18]. 因此,电容量的公式可以近似地表示为:

式中:ε0为真空中的介电常数;εr为相对介电常数(本设计中,板间物质为空气,值为1);s 为两极板的相对面积;d 为两极板间距. 假设电容角度传感器的两极板A、B之间的半径都是R,距离为d . 当A旋转时,相对面积变化量记为Δs,两极板的初始位置相对面积为零,得到如下的关系式:

总电容变化量ΔC 为:
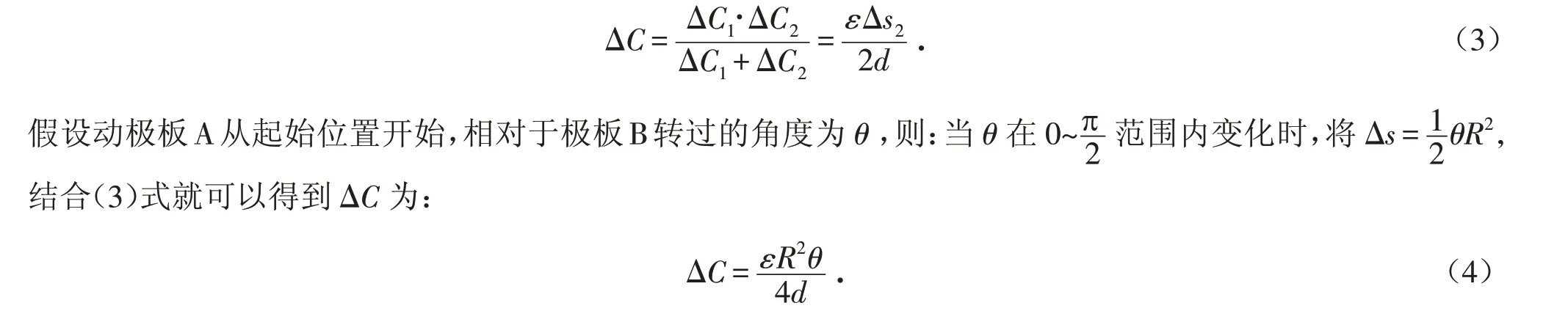
由此可得,随着极板A的转动,两极板所对应的角度改变时,从而引起其所对应的面积和电容发生周期性变化. 转动角θ 在四个不同的象限变化时,引起的角度和电容的变化量都是有一定关系的,在保持传感器形状和极板间距不变的情况下,电容值变化与角度变化呈线性关系. 另外,可以求出该传感器引起的电容的变化量ΔC 最大值为:

3 信号处理
电容角度传感器信号处理主要由CAV444电容电压转换电路、放大电路、A/D转换电路和显示电路部分组成. CAV444将电容的变化量转换为差分电压输出,经过OP07构成的仪用放大电路进行放大后,得到与角度变化呈线性关系的输出电压,并经A/D转换电路和单片机STC89C52处理,最终显示测量结果.
3.1 电容-电压转换集成电路CAV444
电容-电压转换电路采用芯片CAV444直接测量电容传感器的电容变化并将其转换成相应的线性电压输出. CAV444是一个可测量多种电容传感器信号的线性转换比例电压输出的接口集成电路,具有信号采集、处理和差分电压输出的功能[19]. 该芯片测量范围宽,可测量范围为19~2200 pF,并按一定的比例关系输出连续的电压值. CAV444 内部集成了温度传感器、测量振荡器、频率电压转化电路、低通滤波器、输出级(阻抗转化和放大)以及内置电源,灵活地解决了传统振荡法使用独立元器件的精确度高但线性度低的问题,消除了电路杂散电容所带来的影响[20]. 该芯片内部集成的温度传感器,有效地降低了外部环境对芯片正常工作的影响. 该芯片附加了一个Excel校准软件kali_CAV444.xls,既提高了输出电压的校准效率,又便于快速准确地选取元器件的型号. CAV444的原理图如图3所示.

图3 CAV444工作原理图Fig.3 Principle circuit diagram of CAV444
CAV444测量的电容值ΔCm=CM,max-CM,min和电压输出信号之间具有线性关系,其中CM,min表示CM的本底电容值,CM,max表示电容传感器的最大电容值[19]. 输出的差分电压信号与输出电压与内置的参考恒压源VREF相联系. 差分电压输出可直接连接到A/D转换电路上,模拟电路系统测量分辨率只与电路本身的噪声有关,可以利用集成电路内置的温度传感器和单片机组成一个可以数字校准的电路系统. CAV444芯片的12引脚和被测量的电容(电容角度传感器)相连,当按一定的规律对CM充放电后,就会产生一个波形和幅值恒定的三角波,该三角波的频率和芯片内部的测量振荡器的频率基本保持一致,同时和CM呈线性关系. 内置频率/电压变换电路将频率转换为电压信号,并送到下一级低通滤波器滤波处理,最后输出一个直流电压信号. 通过零点和满度可调的输出级,即通过调节电阻R1得到所需要的电压输出值,输出电压与内置2.5 V的参考电压VREF形成差分电压输出VDIFF.
3.2 放大电路
本设计中,由于集成电路CAV444 输出的差分电压幅值过小,因此采用放大电路处理得到的电压信号,利于后续采集,放大电路如图4所示.
该放大电路由三个OP07 组成,分别记为运算放大器A1、A2和A3. A1和A2为第一级的差分放大电路,A3则构成第二级,总放大倍数K 表示为

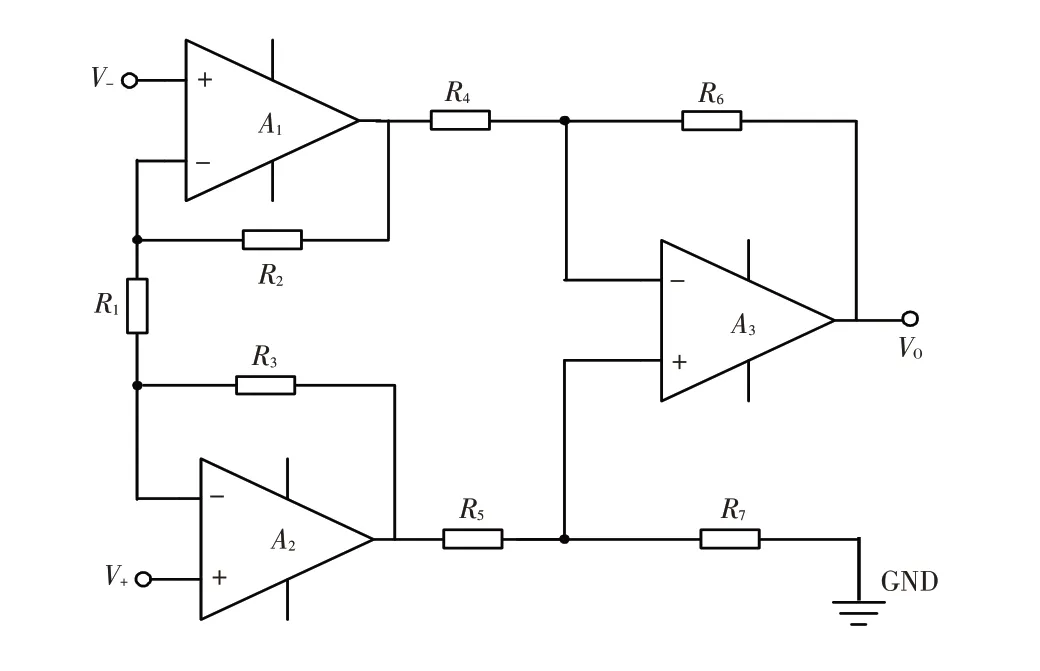
图4 放大电路Fig.4 Amplifying circuit
4 试验结果及分析
将电容角度传感器、CAV444 电容转换电压电路、放大电路、A/D 变化电路以及显示电路连接,并进行电路的调零和调满. 由于不受传统结构设计中引线的限制,因此动极板A 可以自由旋转,角度的变化范围为0~2π,并且输出的电压幅值与角度呈线性关系,本设计中只测量0~π/2 的范围内角度的变化,测量结果如表1所示.
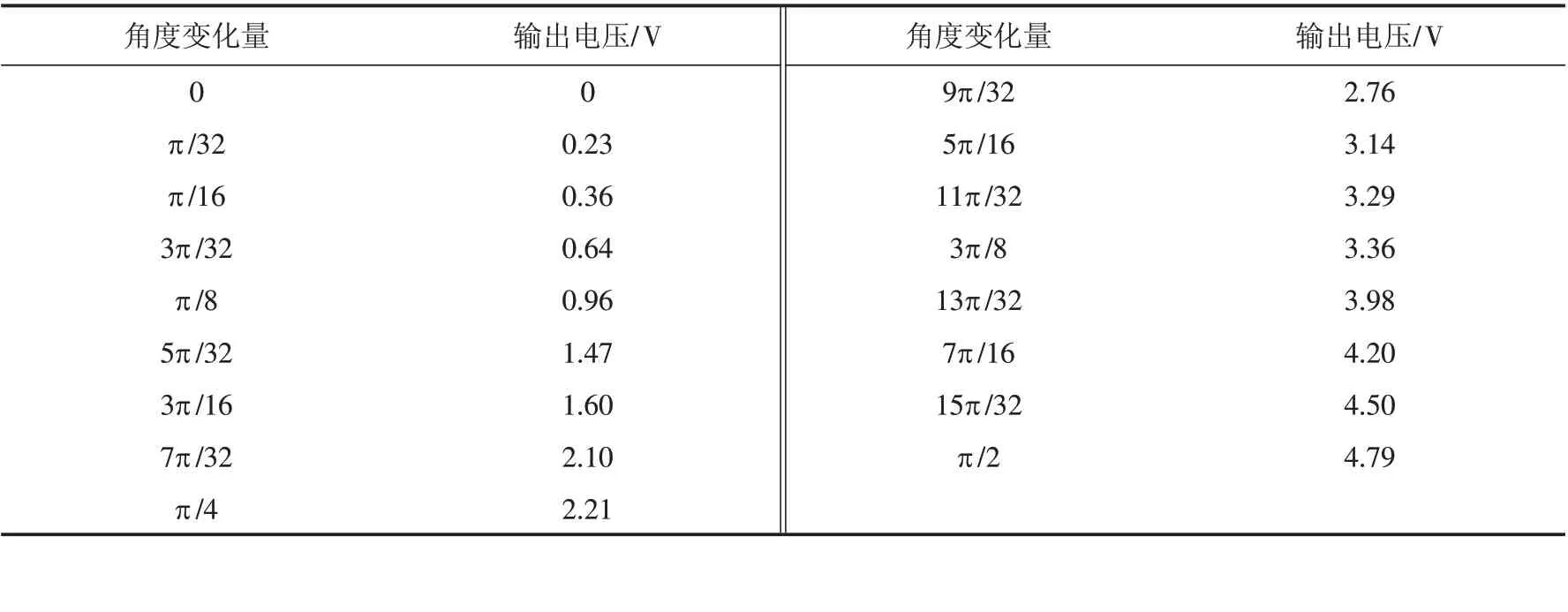
表1 输出电压测量值Tab.1 Measurements of voltage output
根据最小二乘法原理对实验所得到的数据进行线性处理分析,得到线性拟合后的曲线,如图5所示.

图5 一阶线性拟合曲线Fig.5 First order linear fitting curve
可知,拟合曲线的表达式为V=3.205 9θ-0.204 9,拟合度R2的值是0.993 7,该值接近于1. 可以看出,实际测量的输出电压和动极板所旋转的角度变化量具有良好的线性关系,表明实际测量的数值大小和预估的数值之间近似相等,误差在可以接受的范围内.
5 结论
本文设计的电容角度传感器,从根本上避免了传感器的引出线因长时间动作而产生误差、使用寿命短等一系列问题,消除了寄生电容及其他方面的干扰,提高了测量精度、灵敏度以及性价比. 当动极板在0°~90°的范围内旋转时,得到了较好的线性电压输出. 测量结果可知,该传感器系统仍然具有一定的误差,原因可能是零点和满度调整时转轴抖动引起的误差以及屏蔽措施不够完善引起的. 通过采取更加有效的屏蔽措施,能够有效避免大部分的电路干扰,满足实际角度测量需要.
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
防爆电机(2021年3期)2021-07-21
科技视界(2021年4期)2021-04-14
石油管材与仪器(2020年5期)2020-11-05
无机盐工业(2019年5期)2019-05-24
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14
电子制作(2017年7期)2017-06-05
