
有监督学习下的市域铁路隧道结构裂缝边缘识别方法
2021-02-28 07:03陈定方高铭鑫黄永亮门燕青
中国机械工程 2021年4期
张 琨 陈定方 高铭鑫 黄永亮 刘 洋 门燕青
1. 武汉理工大学智能制造与控制研究所,武汉,430063 2. 中铁第四勘察设计院集团有限公司,武汉,430063 3. 哈尔滨工业大学交通科学与工程学院,哈尔滨,150090 4. 济南轨道交通集团有限公司,济南,250014
0 引言
裂缝是市域铁路隧道结构中最常见的表观病害[1-3],是隧道结构即将发生损伤的征兆,如果不及时采取加固措施,任由裂缝延展,将会导致隧道的承载力降低、使用寿命缩短[4]。因此,对服役期内的隧道结构进行定期巡检,有效识别结构表观的裂缝病害是一个迫切需要解决的问题。
在隧道结构中,裂缝病害的检测工作多依赖于传统的人工巡检,该方式难以准确描述裂缝的形态及位置[5],存在检测成本高、工作效率低、病害识别结果稳定性差等诸多问题,难以满足目前隧道结构对快速化运维管理的要求。随着视觉传感设备和数据分析技术的快速发展,以计算机视觉技术为依托的隧道结构裂缝病害检测装备快速发展,如王华夏等[4]以车载CCD(charge coupled device)相机为核心部件,提出一套隧道衬砌裂缝自动化检测系统,并在实验室内完成了对系统的测试;HUANG等[6]基于CCD阵列相机,设计了一套可以获取高质量隧道衬砌检测数据的图像扫描装备MTI-100;YU等[7]基于Komatsu Engineering Crop开发的图像扫描系统,提出了一种集移动遥控和裂缝检测功能为一体的裂缝自动化检测方法,可以实现0.3 mm的检测精度。
基于计算机视觉技术的裂缝识别方法是上述隧道结构裂缝检测装备的技术关键。裂缝在隧道结构的表观图像内属于重要的视觉信息,常表现为非连续性的局部特征,即像素目标点的灰度值会产生剧烈的变化[8]。针对裂缝病害独有的特征信息,王耀东等[9]针对传统图像处理算法难以有效检测裂缝,提出一种基于连通域的多级滤波算法,可以实现隧道表面裂缝的智能检测;王平让等[10]提出一种基于图像局部网格特征的隧道衬砌裂缝自动识别方法;贾东峰等[11]依托点云影像技术,提出了多尺度空间下隧道裂缝渗水区域识别检测算法,并通过实例验证了该算法的鲁棒性;隧道内的裂缝对比度低、难以识别,针对该问题周丽军等[12]提出了一种基于分数阶傅里叶变换的裂缝检测方法。以上所述隧道结构裂缝识别方法具有相同的思路,均是采用所提出方法直接对隧道结构表观图像进行运算处理,检测图像中是否存在裂缝,而未参考无裂缝图像视觉特征信息,这类方法容易导致检测结果存在一些伪裂缝边缘,影响病害识别精度。
笔者将“监督学习”的思想引入市域铁路隧道结构病害检测研究中,以无裂缝图像的视觉特征信息为参考,提出一种有监督学习下的市域铁路隧道结构裂缝边缘识别方法。
1 有监督学习下的裂缝边缘识别方法
CANNY[13]于1986年提出的Canny算子具备良好的边缘识别能力[14],常用来检测图像中的一些重要信息。Canny边缘识别算子的基本思想是先利用二维高斯函数的一阶导数对图像作滤波降噪,然后采用邻域一阶偏导的有限差分计算滤波降噪后图像中的梯度幅值和方向,最后通过对图像中梯度幅值的非极大值抑制处理,并结合双阈值法实现对图像中边缘信息的提取。然而在实际的隧道结构裂缝边缘识别应用中,图像数据受相机自身制造误差以及外界拍摄环境的影响,不可避免地会产生一些噪声,这些噪声在图像范围内以非连续性局部特征的形式呈现,进而可能作为伪裂缝边缘被算法检测出来。在这种情况下,Canny边缘检测算子中不恰当的高低阈值选取将直接影响到边缘检测的结果[1],导致除图像中重要的裂缝边缘目标外,大部分噪声也被检测出来。为此,本研究在利用消费级数码相机获取市域铁路隧道结构表观状态的图像数据后,基于Canny算子的边缘检测结果构造边缘目标的特征矢量,并基于几何特征数据实现。
1.1 边缘目标几何特征矢量的构造
被测图像被Canny算子作用后,形成了由许多边缘目标构成的集合,其中每个边缘目标是一个单独的连通域,该区域内的目标像素点具备相同的像素值并且位置相邻近[15]。连通域的构造规则有两种,即四邻域遍历标记法[16]和八邻域遍历标记法[17]。本文采用八邻域遍历标记法对图像中边缘目标所属的连通域进行标识,在此基础上,统计每个连通域的几何特征,并构造对应的几何特征矢量。
在市域铁路隧道结构表观图像中,裂缝和噪声是两种以不同几何形态存在的边缘目标体,前者多表现为区域连续的曲线、折线结构,后者则以区域离散的点、区块点集居多。依据裂缝边缘和噪声边缘之间几何形态的差异性,定义边缘目标所属连通域的几何特征,主要有连通域的面积、主轴长度、最小外接矩形填充率和当量圆度。
(1)面积A。图像中的像素目标点的几何尺度是以像素为单位的,单个像素点的长度、宽度均为1 pixel,则连通域的面积由区域内像素点的个数可确定:
A=n
(1)
式中,n为连通域内像素点的数量。
(2)主轴长度Dc:
(2)
(3)
(4)
(5)
(6)
(7)

(3)最小外接矩形填充率ω[2]。定义ω为连通域面积A与最小外接矩形面积的比值:
(8)
式中,W为连通域最小外接矩形的宽度;H为连通域最小外接矩形的高度。
(4)当量圆度θ。依据连通域的面积及周长,定义当量圆度为等面积圆直径da与等周长圆直径dp的比值,即
(9)
(10)
(11)
式中,P为连通域的周长。
依据上述定义的4个连通域几何特征,构建每个边缘目标的几何特征矢量f:
f=(A,θ2,ω,Dc)T
(12)
式(12)可以简写为
f=(f1,f2,f3,f4)T
(13)
1.2 基于几何特征数据的裂缝边缘识别方法
在上述几何特征矢量构建的基础上,结合主成分分析[18-19]理论,提出市域铁路隧道结构裂缝边缘识别方法。此处的裂缝边缘识别方法为参数方法,即利用主成分分析技术统计参考状态下非裂缝边缘目标的几何特征水平,并构造裂缝边缘识别的判别阈值,在此基础上,结合异常诊断算法理论,对未知属性的边缘目标进行分类判别。上述过程是在有监督指导下进行的,相比于“无监督学习”,可大幅提高裂纹识别的准确性。
分别定义参考状态数据矩阵Fr和待诊断状态数据矩阵Fd,它们均来自于对Canny边缘检测结果中边缘目标几何特征矢量的统计,前者含有Nr个几何特征矢量fri,所属图像的状态已知,即每个特征矢量对应的边缘目标均为非裂缝边缘的噪声;后者含有Nd个几何特征矢量fdj,所属图像的状态未知,即每个特征矢量对应的边缘目标的属性未知,可能是裂缝边缘也可能是非裂缝边缘。Fr、Fd表达式如下:
(14)
(15)
式中,g为几何特征矢量fri、fdj的维度。
由式(14)可定义参考状态下第β个边缘目标的g维几何特征矢量:
(16)
由式(15)可定义待诊断状态下第φ个边缘目标的g维几何特征矢量:
(17)
数据矩阵Fr包含参考状态下所有非裂缝边缘的几何特征矢量,反映了非裂缝类边缘的整体特征水平。利用参考状态数据矩阵Fr可计算其协方差矩阵:
(18)
(19)
(20)

对协方差矩阵ΣF作奇异值分解,得到:
ΣF=UΛUT
(21)
Λ=diag(λ1,λ2, …,λe, …,λg)
(22)
λ1>λ2>…>λe>…>λg
式中,U为由协方差矩阵ΣF的特征向量组成的矩阵,U∈Rg×g;Λ为由协方差矩阵ΣF的特征值组成的对角矩阵,Λ∈Rg×g;λe为协方差矩阵ΣF的第e个特征值。
从矩阵U中截取前k(1≤k≤g)个特征值对应的特征向量,可得到参考状态数据矩阵在主元特征空间中的基:
(23)
式中,us协方差矩阵ΣF的第s个特征向量,us∈Rg×1。
依据上述各式,以Canny边缘检测结果中的边缘目标为研究对象,利用该边缘目标的g(g=4)个几何特征对隧道结构的裂缝边缘进行识别。在参考状态下,以第β个边缘目标为例,定义基于几何特征数据的裂缝边缘识别因子为τr,β,其表达式如下:
(24)
由式(24)定义参考状态下基于几何特征数据的裂缝边缘识别因子向量τr,τr∈R1×Nr,表达式如下:
τr=(τr,1,τr,2,…,τr,β,…,τr,Nr)1×Nr
(25)
利用参考状态下基于几何特征数据的裂缝边缘识别因子向量τr定义裂缝边缘识别的判别阈值δ:
δ=γτr,0.95
(26)
式中,γ为保证系数,依据具体边缘目标的几何特征数据而定,通常取1.20;τr,0.95为参考状态下裂缝边缘识别因子向量τr取95%置信概率的中位数。
根据上述对参考状态下裂缝边缘识别因子的定义,同理得到待诊断状态下基于几何特征数据的裂缝边缘识别因子τd,φ,其定义如下:
(27)
φ=1,2,…,Nd
当得到参考状态下的裂缝边缘识别判别阈值δ和待诊断状态下的裂缝边缘识别因子τd,φ后,可对裂缝边缘识别得判别因子Yd作出定义:
(28)
当Yd取值为1时,判定边缘目标属于裂缝类,保留该边缘,取值为0时,判定边缘目标属于非裂缝类,即噪声,则剔除该边缘。
1.3 计算步骤
(1)选取不含有裂缝的隧道结构表观图像;
(2)运用Canny算子初步检测图像中的边缘目标,并对所有边缘目标所属的连通域进行标识;
(3)利用式(1)~式(11),分别计算边缘目标的面积A、主轴长度Dc、最小外接矩形填充率ω以及当量圆度θ;
(4)利用式(12)及式(13),构造边缘目标的几何特征矢量f;
(5)重复步骤(2)、步骤(3),直至得到参考状态下全部边缘目标的几何特征矢量数据矩阵Fr;
(6)利用式(16)~式(25),建立参考状态下基于几何特征数据的裂缝边缘识别因子向量τr;
(7)利用式(26)构建裂缝边缘识别的判别阈值δ;
(8)输入待诊断状态的隧道结构图像,重复步骤(2)~步骤(5),构造待诊断状态下的数据矩阵Fd;
(9)利用式(27)确定待诊断状态下基于几何特征数据的裂缝边缘识别因子τd,φ;
(10)根据式(28)判别隧道结构图像中边缘目标的属性。
不断重复步骤(9)~步骤(10),即可实现对待诊断状态下市域铁路隧道结构图像内裂缝边缘的识别,具体流程见图1。
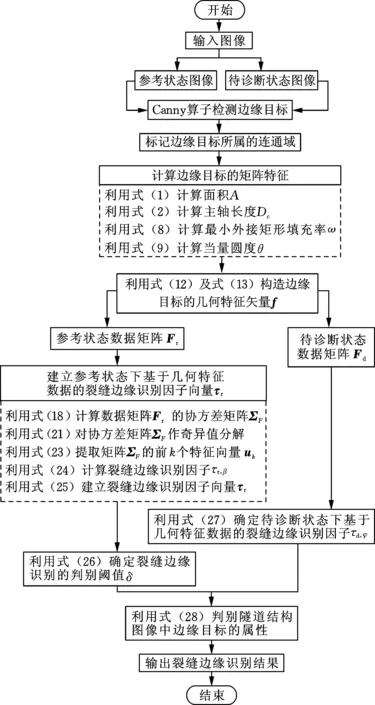
图1 裂缝检测方法的流程图Fig.1 Diagram of the proposed crack detection method
2 实际工程验证
以某实际市域铁路隧道结构的表观图像为研究对象,对本文所提方法(以下简称“本文方法”)的裂缝边缘识别效果进行评估,并与传统的边缘识别方法进行比较。某实际市域铁路隧道结构的现场如图2所示。

图2 市域铁路隧道结构现场Fig.2 Municipal railway tunnel structure site
2.1 市域铁路隧道结构表观图像
为了验证本文方法对市域铁路隧道结构表观裂缝边缘识别的有效性,利用消费级数码相机获取实际隧道结构表观图像,然后进行数据运算处理。消费级数码相机的型号为Canon EOC M50。所获取的市域铁路隧道结构表观图像数据被划分为两部分,一部分构成参考状态图像数据矩阵,所有图像表达的视觉信息均是平整的隧道结构表观,如图3所示;另一部分构成待诊断状态图像数据矩阵,每张图像表达的视觉信息不确定,可能是隧道结构裂缝病害,也可能是平整的隧道结构表观,如图4~图6所示。

图3 参考状态图像(示例)Fig.3 Images for reference (example)

图4 待诊断图像1Fig.4 Image 1 for diagnose
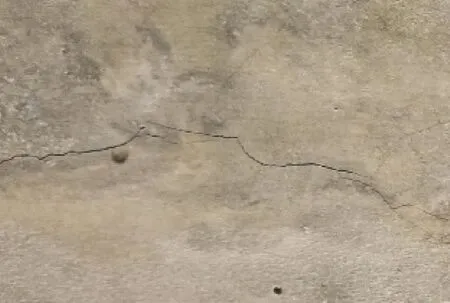
图5 待诊断图像2Fig.5 Image 2 for diagnose
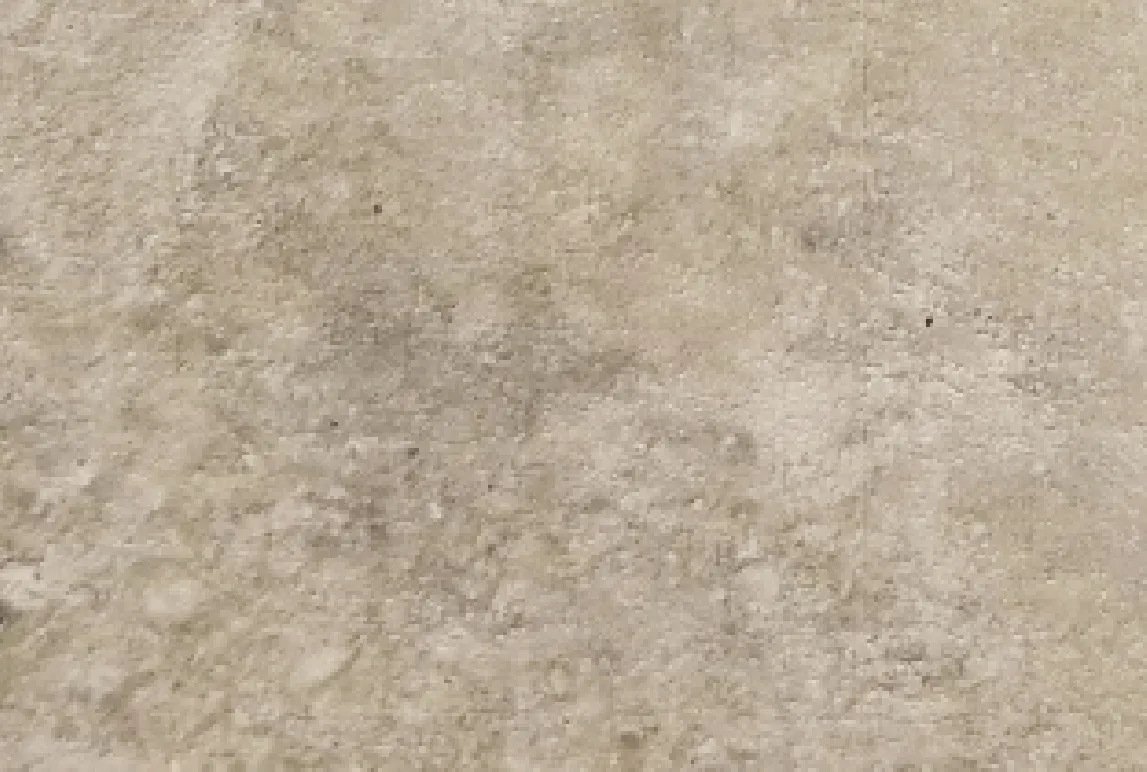
图6 待诊断图像3Fig.6 Image 3 for diagnose
2.2 隧道结构裂缝边缘识别效果
本算例以前述参考状态图像数据集内的隧道结构表观图像为研究对象,利用本文方法设置基于几何特征数据的裂缝边缘判别阈值,进而依据该阈值,识别待诊断状态图像数据中的市域铁路隧道结构裂缝边缘。参考状态下,每个边缘目标均以红色的矩形框标记,如图7所示,利用所有边缘目标的几何特征矢量,建立基于几何特征数据的裂缝边缘识别因子,具体的裂缝边缘识别因子见表1及图8。在图8中,蓝色的实线表示参考状态下基于几何特征数据的裂缝边缘识别因子,红色的实线表示裂缝边缘识别的判别阈值。
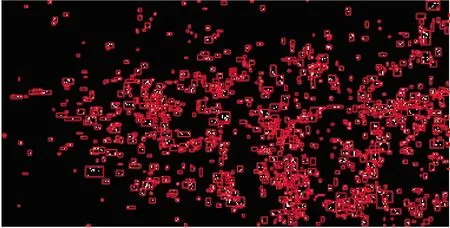
图7 参考状态下的边缘目标Fig.7 Edge targets for reference
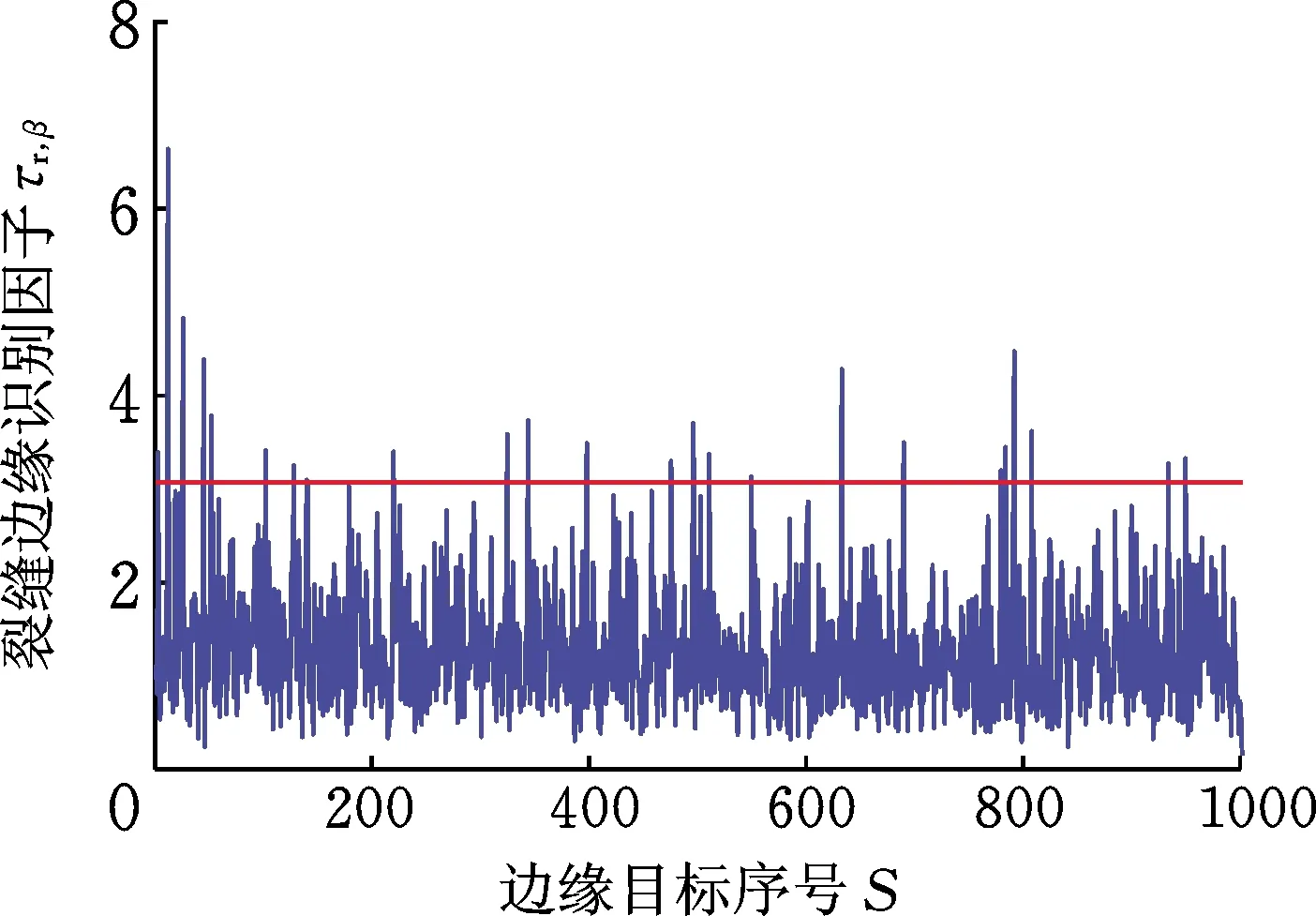
图8 参考状态下裂缝边缘识别阈值Fig.8 Threshold of crack edge under reference state

表1 参考状态下的裂缝边缘识别因子(部分)Tab.1 Index for crack edge detection in reference state(portion)
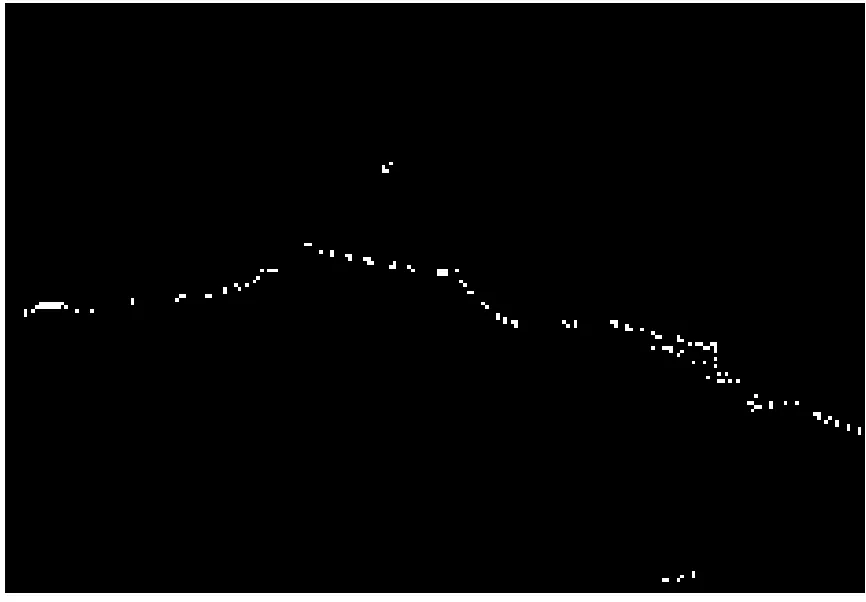
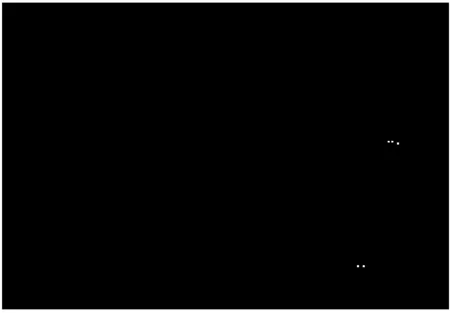
基于上述基于几何特征数据的裂缝边缘判别阈值,对图4~图6中待诊断状态图像数据集中市域铁路隧道结构图像的裂缝边缘进行识别,裂缝边缘识别的结果如图9~图11所示,算法的处理时间如表2所示。由图9~图11的裂缝边缘识别结果可知:对于市域铁路隧道结构表面出现裂缝病害的图像,裂缝边缘识别方法能够诊断出异常的边缘目标,并在保留异常目标(裂缝边缘)的基础上,剔除非异常的噪声点;对于市域铁路隧道结构表面平整的图像,裂缝边缘识别方法可以直接滤除图像中非异常的噪声点。因此,本文算法即使面对的是市域铁路隧道结构表观状态未知的图像,也能够有效地诊断出结构表面存在的裂缝病害。
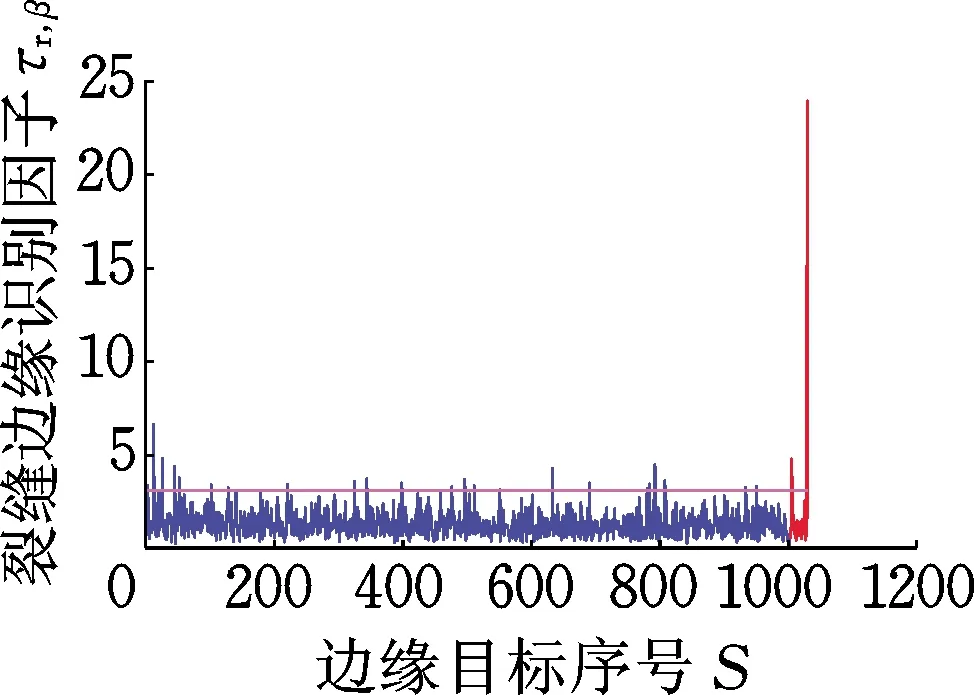
(a) 裂缝边缘识别因子诊断
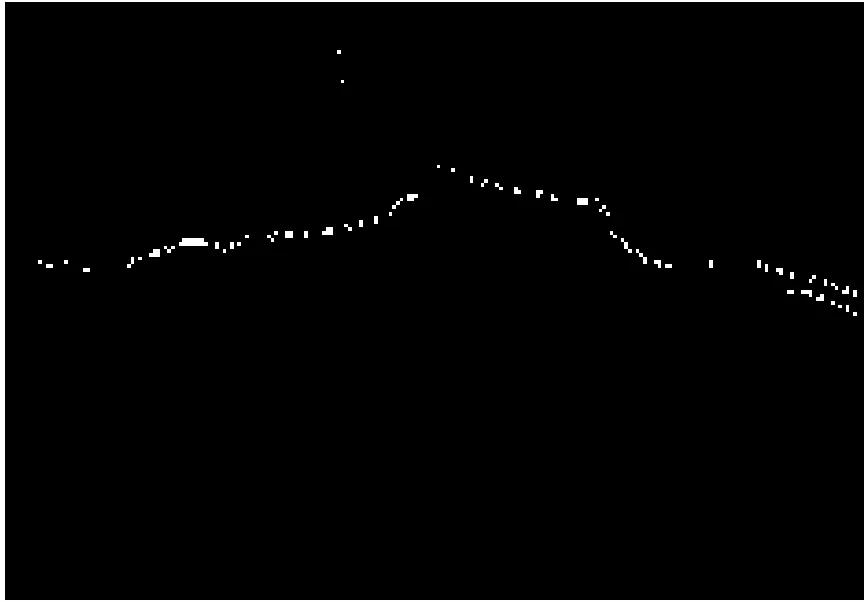
(b) 裂缝边缘识别结果

(a) 裂缝边缘识别因子诊断
(b) 裂缝边缘识别结果

(a) 裂缝边缘识别因子诊断
(b) 裂缝边缘识别结果
在图9a、图10a以及图11a中,蓝色的实线表示参考状态下基于几何特征数据的裂缝边缘识别因子,红色的实线表示待诊断状态下基于几何特征数据的裂缝边缘识别因子,玫红色的直线表示裂缝边缘识别的判别阈值。

表2 本文算法处理时间Tab.2 Processing speed of the proposed algorithm
2.3 与传统边缘识别方法的性能比较
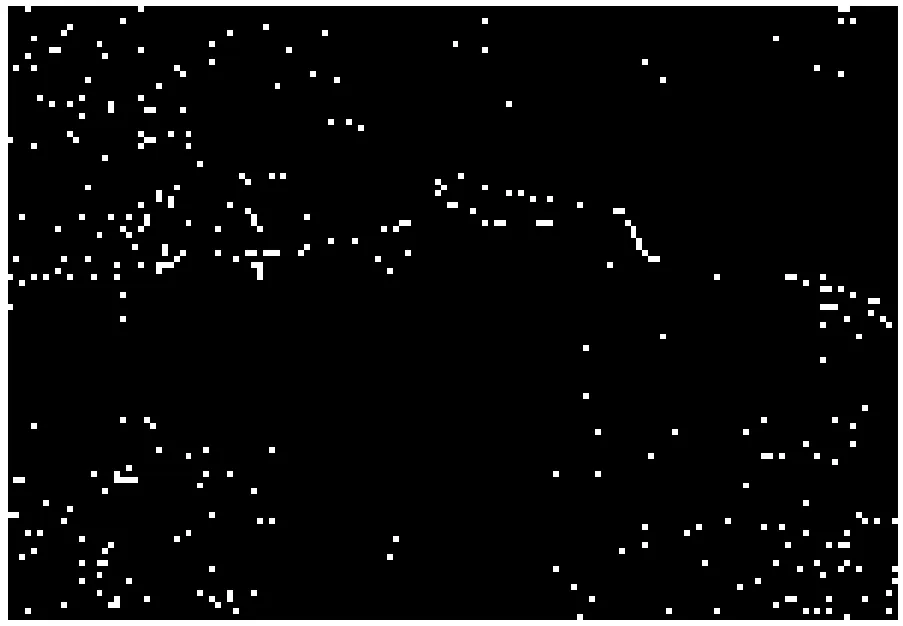
为了验证本文方法的识别效果,选取经典的边缘识别方法检测待诊断状态下图像数据集内的市域铁路隧道结构裂缝边缘,并与采用本文方法所得到的市域铁路隧道结构裂缝边缘识别结果进行比较。选取的经典边缘识别方法有Canny算子、Sobel算子、Prewitt算子、Roberts算子和Log算子,它们对市域铁路隧道结构裂缝边缘的识别结果见图12~图16。对比的隧道结构表观图像采用图4的待诊断图像1和图6的待诊断图像3。
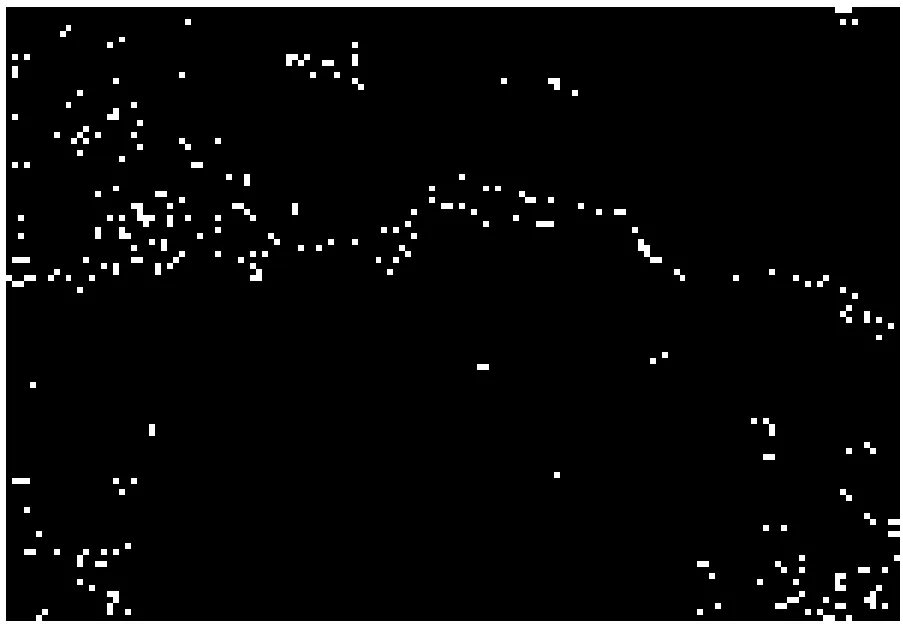
(a) 图4识别结果
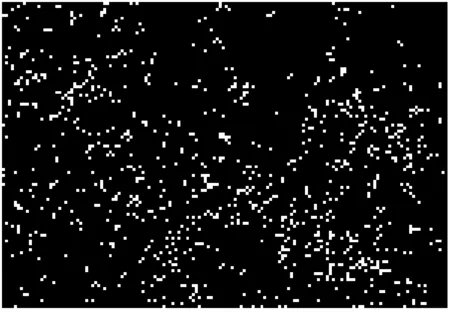
(b) 图6识别结果
(a) 图4识别结果
(b) 图6识别结果
(a) 图4识别结果
(b) 图6识别结果

(a) 图4识别结果
(b) 图6识别结果

(a) 图4识别结果

(b) 图6识别结果
将图9b、图11b与图12~图16进行对比可知:相比Canny算子、Sobel算子、Prewitt算子、Roberts算子以及Log算子等经典的边缘识别方法,本文方法将监督学习的思想引入结构病害检测研究,在保留裂缝边缘的基础上,能够有效地剔除背景中的噪声,从而实现“保边去噪”的效果,具备较强的实际应用性。
3 结语
为了解决市域铁路隧道结构表观裂缝病害的有效识别难题,提出了有监督学习下的市域铁路隧道结构裂缝边缘识别方法,该方法依托消费级数码相机可以获取市域铁路隧道结构表观的图像数据,可为市域铁路隧道结构表观裂缝病害的识别研究提供有效的数据支撑;同时将“监督学习”的思想引入市域铁路隧道结构裂缝病害检测研究,以无裂缝图像的视觉特征信息为参考,可为基于计算机视觉技术的市域铁路隧道结构表观病害识别研究开拓新路径。
猜你喜欢
河北果树(2021年4期)2021-12-02
铁道通信信号(2020年9期)2020-02-06
上海公路(2019年3期)2019-11-25
福建基础教育研究(2019年10期)2019-05-28
铁道通信信号(2018年6期)2018-08-29
通信产业报(2016年44期)2017-03-13
遗传(2014年3期)2014-02-28
都市快轨交通(2014年3期)2014-02-27
都市快轨交通(2014年3期)2014-02-27
雕塑(1999年2期)1999-06-28
