基于非对称融合结构设计的空管自动化系统多监视源融合处理方案
2021-02-26 21:21张震亚马正颖席杨
中国新通信 2021年21期
张震亚 马正颖 席杨
引言:
近年来,随着民航领域不断引入广播式自动相关监视系统(ADS-B)、广域多点定位系统(MLAT)等新型监视手段,不同空管自动化系统现场引接的监视源信号结构逐渐向复杂化、非标准化发展,传统的基于对称融合结构的空管自动化系统航迹融合方案已逐渐不能满足不同监视源信号引接情况的民航空管现场的实际使用需要。
莱斯NUMEN系列空管自动化系统作为目前最新架构的空管自动化管制系统,具备成熟的、基于非对称融合结构的空中目标监视源多路融合处理能力,在北京、上海、广州、贵阳、长春、青岛、长沙、杭州、南京、厦门、福州、汕头、乌鲁木齐、大连、沈阳、兰州、西宁、南宁、昆明等全国各地区域的区管、大/中/小型机场等空管现场具有多年的稳定使用经验,在满足不同现场信号引接条件的同时,可持续为管制员提供满足民航管制精度需求的综合目标航迹。
本文结合NUMEN系列空管自动化系统的实际融合结构设计,对多监视源融合处理方案在民航空管自动化系统中的应用进行介绍和探讨。
一、多类型监视源数据前置处理
目前民航领域建设的各厂家空管自动化系统通常支持多种类型监视数据的前置处理,包括一次/二次航管雷达、S模式雷达、广播式自动相关监视系统(ADS-B)、广域多点定位系统(MLAT)等。系统需要对多类型监视源数据进行前置预处理,完成监视源报送的原始信号数据格式解析和合法性检查(包括CRC校验、数据帧格式检查、SAC/SIC检查、时标检查等),并依据监视源报告的质量指标过滤低质量不可信数据,为后续航迹融汇处理提供稳定统一的数据支撑。
通常来说,实际应用于民航场景的空管自动化现场一般以航管雷达和ADS-B信号为主要监视源。其中,航管雷达作为传统的空中目标监视信号,其信号性能稳定,位置信息可靠,更新周期较长(通常为4~12秒)。ADS-B作为近年来快速发展的新型目标监视源,具有建设成本低,更新周期快(通常≤1秒),位置精度高(理论精度可到达米级甚至厘米级)等特征。然而,由于ADS-B报告的位置信息依赖于机载设备的定位结果(包括GPS定位系统、惯导定位系统等),其报送位置的整体可信度和均一度均低于基于统一观测原理的航管雷达。故目前民航场景的各地管制现场往往将ADS-B作为航管雷达的辅助监视源进行补充使用[1]。
二、基于非对称融合结构设计的监视源处理方案
根据实际民航用户的管制范围和现场硬件设施标间差异,空管自动化系统现场引接的信号源规模可少至仅为1~2部ADS-B信号,也可多至数十部航管雷达及数十部ADS-B信号。
对于常规引接多路航管雷达监视源及ADS-B监视源的空管自动化现场,传统自动化系统的融合处理模块往往采用对称系统设计,将航管雷达与ADS-B数据同时分别进行二级融合后传至一级模块进行最终融合处理;或将原始数据直接传至一级模块进行最终融合处理。
以上的两种对称融合方案各自存在一定的固有缺陷,前者由于对更新周期较长的航管雷达数据进行了两级融合处理,将引入无法忽视的二次处理延迟,从而导致最终融合得到的综合航迹较原始航管雷达数据有较为明显的时延损耗;后者为规避两级融合带来的处理时延,取消了二级融合模块,在大型自动化系统现场引接信号源较多的情况下,往往给一级系统处理引入过大的处理负荷,对于整个自动化系统的稳定性带来隐患。
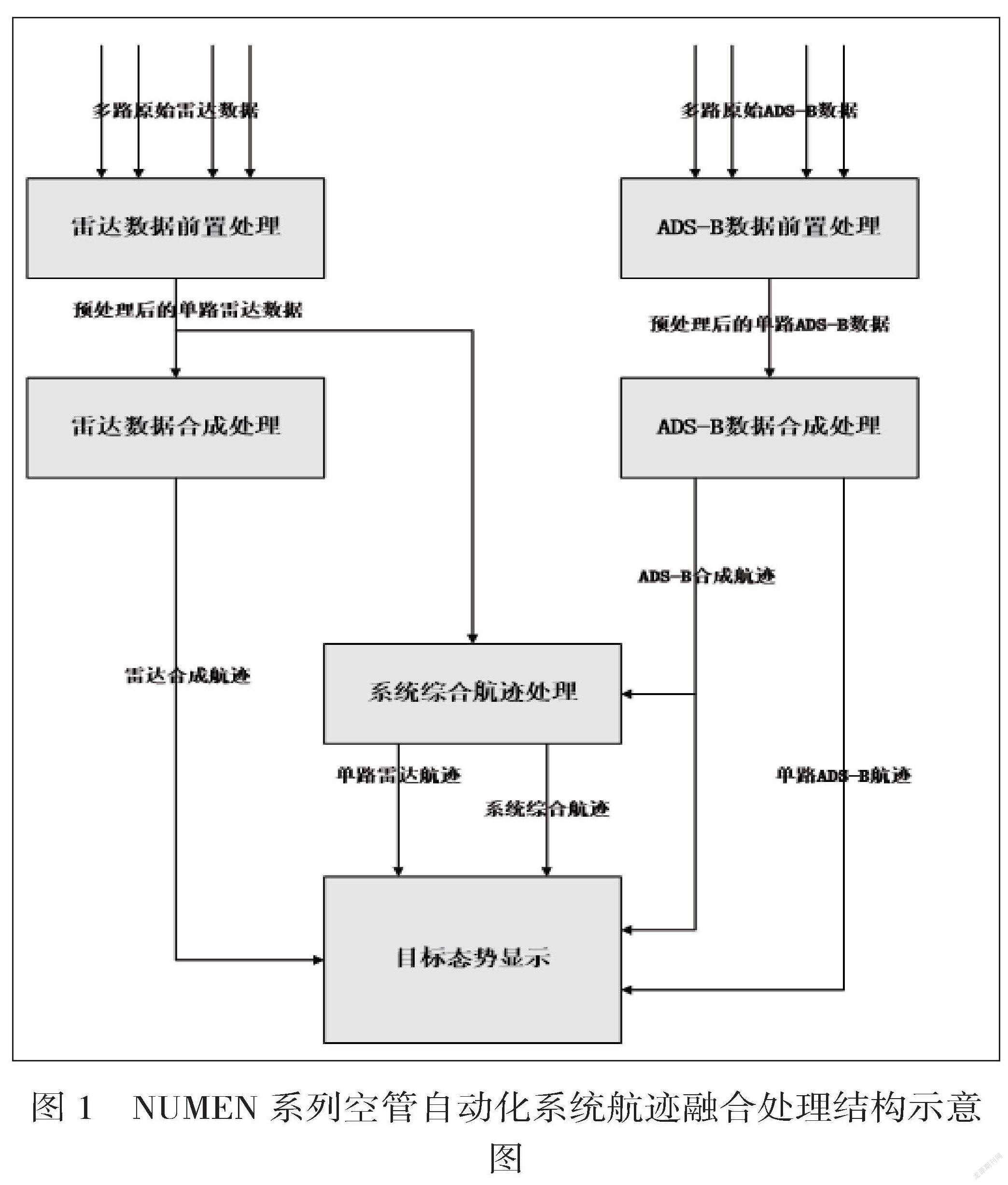
考虑以上两类对称结构设计的固有缺陷,结合多年来各地空管自动化系統的实际使用经验,近年来NUMEN系列空管自动化系统在进行航迹融合处理时通常采用非对称结构设计,将新型监视源(ADS-B/MLAT)信号进行融合后得到的二级合成航迹与原始航管雷达数据并行送入一级模块进行最终融合。
基于该非对称融合结构设计的自动化系统融合方案,可有效避免航管雷达因二次融合造成的长时间信号延迟,并保留了航管雷达信号在参与最终融合处理中的横向可选择性,同时通过对ADS-B、MLAT等高频率更新的新型监视源的网络信号进行二级融合,以减轻一级融合模块的处理负担,降低监视源网络信号数据风暴可能造成的一级融合模块过载风险。
通过近年来各地实际现场实施情况来看,无论是仅引接少量ADS-B信号的中小型机场终端,还是同时引接多部航管雷达和ADS-B信号的区管/大型机场管制系统均可灵活使用该架构,符合当前民航空管系统设计的方向需求。系统融合航迹经过多次现场校飞测试验证,其精度能够满足现场管制运行的要求。
三、基于自适应场景FAHP的航迹融合处理算法
基于多年来各地空管现场实施经验及使用经验,NUMEN系列空管自动化系统形成了一套独有的,基于自适应场景模糊层次分析法(Fuzzy Analytic Hierarchy Process,FAHP)的航迹融合处理算法,以实现较国内外传统空管自动化系统[2]适应性更强,灵活度更高的航迹融合处理效果。
NUMEN系列空管自动化系统在融合判定中,自动调整航空器各判断因素在不同场景下对于最终结果的影响权重,根据各类实际航空器的飞行场景采用自适应的融合门限窗口设计。例如对于目标之间的距离因素,系统设计有“≤1KM”/“ ≤1.5KM”/“ ≤5KM”/“ ≤7KM”/“ ≤15KM”/“ ≥15KM”等多种门限窗口,根据航空器实时所处的不同空域、高度、速度情况,自适应选取恰当的位置门限参数。在不同的条件场景组合情况下,如高空ADS-B信号与航管雷达信号融合,低空航管雷达与航管雷达融合、低空ADS-B信号与MLAT信号融合等情况,系统会自动切换不同的融合判断处理流程,并相应调整各判断因素的融合权重,进而得出不同的结论,实现最终融合效果在多场景下自适应模糊匹配。
例如,针对位于近场附近区域的起降航空器,其空间判断因素(距离/高度/速度等)差异很小,系统将自动增大二次代码/地址码等固有身份因素的判断权重,尽可能防止近距离起降目标或场面目标发生错误融合情况;位于ACC区域的高空目标,航空器固有身份因素(二次代码/地址码等)的影响权重将自动降低,系统将综合考虑空间判断因素(距离/高度/速度等)的差异情况,防止因二次代码/地址码等身份信息冲突情况造成的目标错误融合。
四、可灵活调整的系统特殊融合处理区域
在多场景自适应模糊匹配的基础上,NUMEN系列空管自动化系统支持通过数据库DBMS工具图形化界面对于不同类型的各个信号源进行特殊的单监视源处理区域设置。可供设置的特殊处理区域包括但不限于:监视源生效区、监视源丢失区、监视源初始航迹抑制区、监视源融合优先级区、监视源不信任区等。
4.1监视源生效区
该区域用于限制单路监视源的生效范围,通常包含监视源的理论有效覆盖半径。系统对区域以外报告的单监视源航迹直接进行丢弃处理。
4.2监视源丢失区
该区域用于剔除单路监视源的无效区域,通常包含监视源的理论盲区。系统对区域内部报告的单监视源航迹直接进行丢弃处理。
4.3监视源初始航迹抑制区
该区域用于剔除单路监视源的假目标频发的敏感区域,系统对区域内部新生成的单监视源航迹直接进行抑制处理,但对从外部经过的单监视源航迹不做任何抑制处理。
4.4监视源融合优先级区
该区域用于多监视源优选处理。当某一航迹可被多路监视源进行跟踪时,利用该区域可调节不同监视源报告的单路航迹信息在最终的融合航迹中贡献成分的优先级比重。
4.5监视源不信任区
该区域用于低质量监视源剔除处理。当某一航迹可被多路监视源进行跟踪时,利用该区域可在多路监视源航迹中自动剔除已经明确为低质量的单监视源航迹信息;若某一目标无法被多路监视源冗余覆盖监视,只能被一路不信任区内的单监视源发现并进行跟踪时,则系统不再进行任何剔除处理。
根据各地空管自动化系统现场用户多年使用反馈,通过各类特殊处理区域的设置,厂家技术人员及用户均能够方便快捷地修改各监视源在不同空域范围内对系统最终融合航迹的影响效果,以实现现场信号源的最大化可靠利用,减少低质量信号源对最终融合迹的不良干扰。在现场某一监视源出现偶发性故障或监视源性能变化等特殊情况时,也可以方便地由现场用户临时调整航迹融合效果,保证现场综合航迹随时具备稳定可用的精度与可靠性。
五、结束语
基于国内外多个空管现场用户的多年使用反馈体验,经过各现场每年进行的航迹融合精度校飞测试结果验证,NUMEN系列空管自动化系统的航迹融合处理设计结构符合当前民航空管自动化系统发展方向,可提供满足区管、大/中/小型机场、塔台/机坪管制等各类不同用户需求的高精度系统融合航迹,为管制现场的空中交通飞行安全保障提供可靠指导依据。所提供的稳定可靠的航空器目标航迹将进一步为自动化系统各类衍生功能,如安全告警功能、航空器4D轨迹运算功能等提供数据基础,为提高运行现场空中交通管制效率提供可靠的参考依据。
参 考 文 献
[1]肖玉,成捷,賀姿.多雷达与ADS-B数据融合处理方法的研究与优化[J].数字技术与应用,2018,36(08):42-43.
[2]阳宇.多源相关监视雷达数据融合研究[D].电子科技大学,2012.
猜你喜欢
航空学报(2022年9期)2022-10-14
火力与指挥控制(2022年8期)2022-09-16
现代计算机(2022年3期)2022-04-22
大飞机(2021年7期)2021-09-05
科普童话·百科探秘(2020年5期)2020-09-14
数码设计(2018年7期)2018-10-20
小学生导刊(高年级)(2016年11期)2016-11-14
中国新通信(2016年8期)2016-06-03
少年科学(2015年7期)2015-08-13
珠江水运(2015年11期)2015-07-24