
一种多传感器异构数据接引的实现方法
2021-02-26 21:20:47吕涛李璐周鑫
中国新通信 2021年22期
关键词:多传感器
吕涛 李璐 周鑫

【摘要】 多传感器异构数据接引系统接入终端区多监视源数据,包括一次雷达、二次雷达、多点定位系统(MLAT)、广播式自动相关监视系统(ADS-B)、场面监视雷达系统等,通过对各种监视源的异构监视信息进行融合处理,保障终端区高密度航班安全飞行。本文介绍了一种多传感器异构数据接引的实现方法,通过对多源数据信号接口、数据质量监视与通道选择和数据格式变换、坐标变换等保护性预处理完成多传感器异构数据接引功能的实现。
【關键词】 多传感器 异构数据 数据接引系统
引言:
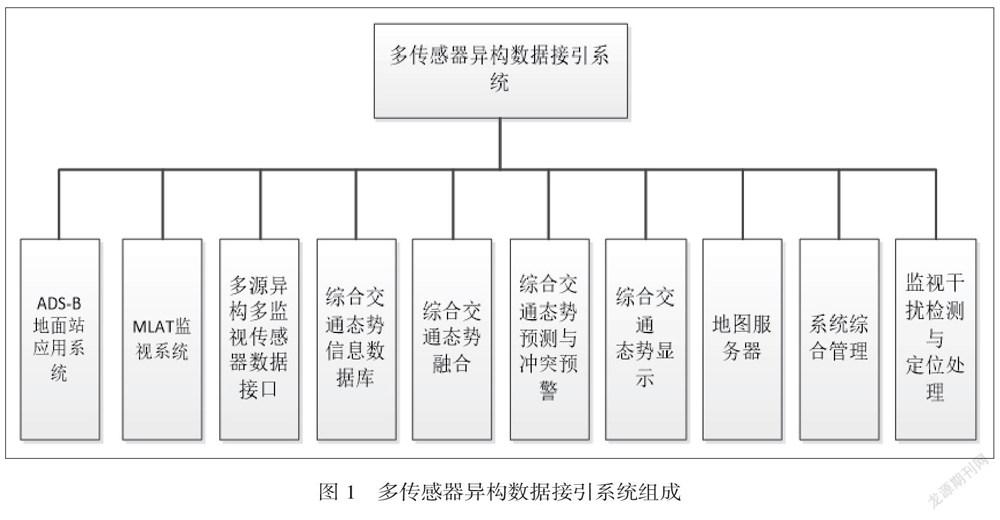
多传感器异构数据接引系统一般具备多个分系统的数据接入,一般包括ADS-B地面站应用系统、MLAT监视系统、多源异构多监视传感器数据接口、地图服务器、综合交通态势融合、综合交通态势预测与冲突预警、监视干扰检测与定位处理、综合交通态势显示、综合交通态势信息数据库、系统综合管理等。其基本组成如图1所示。
在多传感器异构接引系统中,需要接引的各类数据源的输入数据都需要进行一系列的预处理,包括多源数据信号通信接口、数据有效性判断模块、数据质量监视与通道选择、数据保护性预处理、数据归一化格式转换与输入,无航迹相关的单点迹信息、完成点航相关的航迹数据、连续跟踪的航迹和无点迹相关的航迹补充跟踪、高度跟踪等。同时,还要进行面向多传感器异构数据处理数据融合等处理,完成各传感器数据的时空对准和坐标变换。
一、多源数据信号通信接口
多源数据信号通信接口主要完成各传感器系统输入数据的判断和匹配,完成数据滤除、数据隔离、数据分类归集和融合航迹数据输出。通过本地数据库的参数配置完成数据归一化格式转换,其输入源应支持RS-232、RS-422及网络等电气接口。
信号接口处理单元实现对各数据源的不同通信通路的处理。数据信号的处理采用专有技术实现的智能多源数据处理组件,支持ADS-B地面接收机、多点定位系统、Thomson(Thales ATM)雷达、Raytheon雷达头及综合航迹,Telephonics综合航迹,Alenia雷达、Toshiba雷达、Siemens雷达等多种一二次雷达的HDLC、TCP/IP通信规程,通信规程通过服务器参数配置。
多源数据信号通信接口的接口处理模块应为标准处理模块,方便与其他子系统进行连接通信。
二、数据质量监视与通道选择
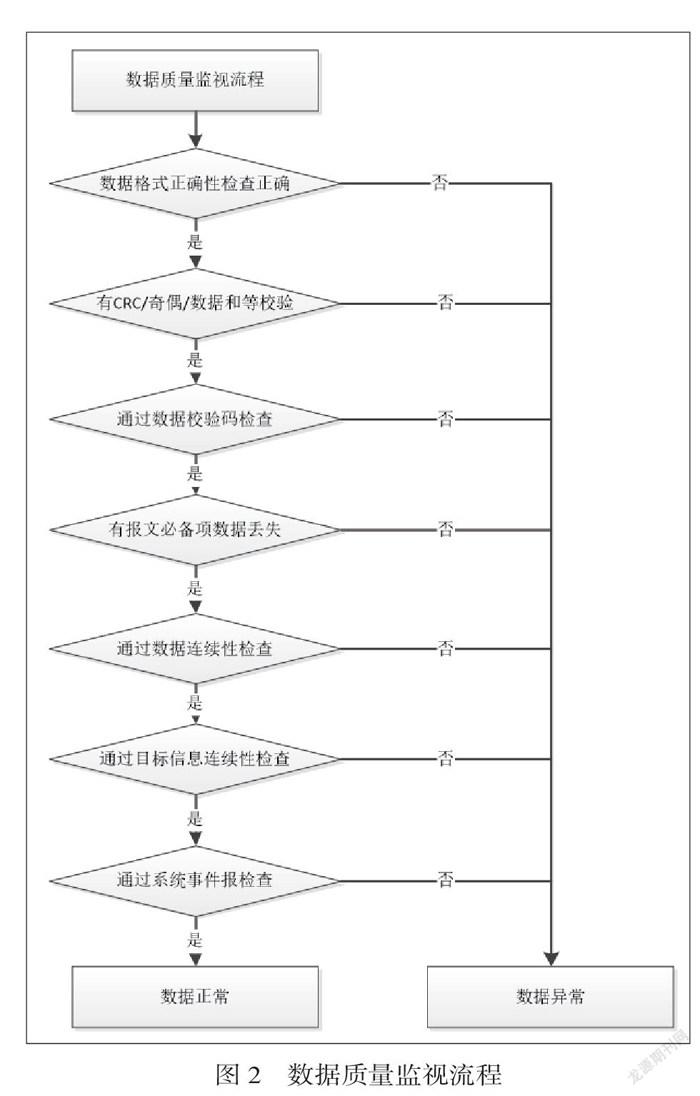
多传感器异构引接系统至少支持两路独立、冗余的信号输入,物理接口包括光纤、网线、串口等多种不同传输介质。系统的前端处理单元对多路数据信号进行信号质量评估、实时管控、通道的自适应切换和通道的手动选择。质量评估系统根据各子系统上报的通道状态和接引系统的质量评估准则完成质量评估,对其上报的数据率进行实施管控,根据通信协议中要求的数据格式及必备数据项进行检查和校验,同时根据评估结果进行自适应的通道切换。数据质量监视流程如图2所示。
图2 数据质量监视流程
三、数据保护性预处理
3.1概述
对通过监视通道选择并已完成归一化后格式转换的数据进行更为精细的数据判断,实施保护性过滤。保护性过滤的规则主要为的数据格式的判断,包括数据包头信息、数据包标志和各数据项中的取值规则等,接口处理功能模块需针对不同的信号源单独设计。
3.2数据格式变换
数据格式变换单元应支持当前主流的数据格式,主要包括Thomson,Raytheon Toshiba,Alenia,WestingHouse,Telephonics,Siemens,NEC等雷达数据和民航推行的ASTERIX型数据格式等。
四、时-空对准和坐标变换
4.1时间轴对准
4.1.1统一的时间戳印记
多传感器异构数据接引系统需要使用统一的时钟完成时间配对和数据记录和数据处理,使用系统GPS时钟作为统一的时间戳印记(time stamp)。各数据源中增加了时间戳印记后,能够方便地补偿各数据源因不同的通信信道导致的时间随机差和各个数据源之间的时间基准差,其中时间随机差变化较大且无特定规律,很难通过其他办法进行时间补偿。需要注意的是,GPS的时间戳的统一,并不能有效减小前端传感器带来的处理延时,即从天线波束指向目标时刻到数据录取设备完成目标探测凝聚并上报时刻的时间差延时。
4.1.2自动检测时间差与时间差的补偿
考虑到每一个传感器在数据输出时都会打上各个传感器系统的时间印记,如果通信信道的延时不是恒定的且并不严重(如小于100毫秒),考虑使用一种不依赖时间戳印记的自动检测时间差并完成时间差补偿的方法。
对于空中的飞行目标而言,在统一的空间坐标系中,各个传感器上报目标时的时间戳仅仅因为各个传感器间的时间差,会导致目标在飞行轨迹上出现位置提前或延后的误差,该误差与飞行目标的航向和航速有关,若多个传感器间通过目标探测时间的位置内插、外推,并将之折合到同一时刻,根据其飞行姿态,完成时间差的自动检测和补偿。
各个传感器件的时间差可以视为有固定时间差和随机时间差组成。固定时间差的补偿只需要通过一次性离线检测或固定周期的离线检测就能完成。而时差中的随机部分则相当于探测过程中出现的探测时间随机误差,该部分无法进行有效的精确补偿,只能由系统在数据处理过程中,完成随机时间差的抑制。通过数据处理和数据融合过程进行时间差抑制时,若该随机时间差远小于传感器系统的探测误差,则该随机时间差可以当做正常处理误差进行处理;如小于100毫秒时,这可以使用该方法进行补偿。
4.1.3内插与内插误差
当各个传感器均为独立系统中并依据各自的系统时间完成目标扫描,即异步扫描状态时,需要进行独立处理。接引系统需要对每个传感器上报的目标航迹数据进行飞行位置的内插和外推,并将之折合到同一时钟刻度和同一空间坐标系后,方能进行下一步的时空对准处理。时间差自动检测和补偿就是为了解决各传感器子系统的时间与接引系统的统一时间戳(即真实时间差)之间的时间误差。经过正北偏差角校正和坐标匹配处理后,可以完成多个传感器系统中上报同一目标在固定时间维度固定位置坐标系下的位置偏差修正,即正北偏差角校正和坐标匹配的误差修正。针对此时的误差,需要进行飞行目标内插、外推的误差修正,使用其飞行姿态适配的内插和外推算法进行推算估计,再结合各个传感器系统的正北分离偏差角和地球大地坐标系的高斯投影等坐标系转换,有效计算出同一时间系、空间系下的飞行目标位置信息。在时间轴对准、时间差检测与补偿的基础上,再通过适当的内插外推计算模型,系统可实现传感器数据的“零延时”融合处理,多源数据处理系统航迹刷新时刻显示的目标位置就是目标当前真实位置的最优估计,而不是延时若干时间后的最优估计。
4.2坐标变换
4.2.1概述
在完成了时间轴对齐的时间差修正下,需要进一步提高目标的探测精度和各传感器数据融合率,以满足多传感器接引系统中对坐标变换的要求。
多传感器接引系统的数据处理功能模块中,各个传感器的目标信息应当处于同一个空间坐标系下。因此需要将不同传感器系统所处的地理位置信息进行存储,再结合其探测到的目标位置信息,完成同一空间坐标系的位置转换。空间坐标系转换带来的计算误差应当小于各个傳感器对于目标的探测精度要求,否则将会造成目标位置信息由于空间坐标变换而导致探测精度下降的问题,该问题会导致目标数据在处理过程存在无法进行目标相关、融合航迹精度小于单传感器上报的航迹精度等的异常情况,从而大大降低的接引系统的性能。坐标变换需要使用到地球椭球模型、地心大地坐标系和高斯投影等数学模型,结合以归化纬度(Conformal Latitude)为基础的球面投影,最佳等效地球半径等概念,并运行这些概念完成转换精度和算法复杂度均合理的坐标变换数学模型和算法。
4.2.2点迹
在点迹数据中,目标三维位置坐标一般都以相对于传感器天线的斜距、方位角、海拔高度三个传感器原始探测参数的形式提供。点迹数据中的位置信息一般为目标相对各传感器系统的斜距、相对正北的角度、飞行的海拔高度三个信息。同时已知各传感器的位置数据,包括经度纬度和高度。根据各传感器系统上报的目标位置信息,结合传感器系统所处的经纬度数据,计算出目标的经度纬度和高度数据,即计算出目标相对大地坐标的位置信息,以此为所有目标的统一空间坐标系。需要进行大地坐标计算的的数学模型介绍如下:
1.以地心作为球心的正球模型计算公式;
2.因地球为椭球形,与标准求模型存在一定的误差,需要使用球模型下的地星坐标转换公式,在该公式中,等效地球半径公式如下:
R=R.sqrt{[1-(2.ε2-ε4).sin2φ0]/(1-ε2.sin2φ0)}
≈R.sqrt(1-ε2.sin2φ0)
R=6378.137km(地球赤道参考半径)
ε=0.081819191(地球第一偏心率)
在上式中,φ0为各传感器系统位置数据中的纬度。等效地球半径由传感器系统所在的纬度决定。
目标由斜距方位角转换到大地坐标的经纬度如下:
(rh-β)→(λ-φ):
cos(γ)=[(R+h)2+(R+C)2-rh2]/[2.(R+h).(R+C)]
tan(λ-λ0 )=sinβ/(ctgγ.cosφ0-cosβ.sinφ0)
tanφ=ctgβ.sin(λ-λ0 )/cosφ0+tanφ0.cos(λ-λ0 )
大地坐标的经纬度转换到相对斜距、方位角:
(λ-φ)→(rh-β):
cos(γ)=sinφ.sinφ0+cosφ.cosφ0.cos(λ-λ0 )
tanβ=[cosφ.sin(λ-λ0 )]/[sinφ.cosφ0-cosφ.sinφ0.cos(λ-λ0 )]
rh2=(R+h)2+(R+C)2-2.(R+h).(R+C).cos(γ)
以上公式中,目标高度、中心站点高度、中心站位置信息均为已知信息。方位角为相对正北的角度(即以Y轴为起点,顺时针为正角度值,取值范围为0°~360°)。
4.2.3航迹
在各传感器已完成目标跟踪的航迹数据中,目标的位置坐标信息与点迹相同,均为相对于传感器天线的斜距、方位角、海拔高度三个传感器原始探测参数的形式。通过极坐标与笛卡尔坐标的转换可以获取该目标的X-Y坐标信息。因航管雷达系统中常使用球面方位圆心距离进行目标投影显示,需要将之转换为相对地心的大地坐标系,即经度纬度和高度数据。利用目标的投影X-Y坐标、海拔高计算大地坐标,所需数学模型如下:
1.以地心作为球心的正球模型计算公式;
2.作为椭球形的地球与正球型存在几何形状偏差引起的误差,采用局部最佳的地球半径说明如下:
X-Y坐标信息到大地坐标的经纬度转换如下:
(x-y)→(λ-φ):
tan(λ-λ0 )=4.(R+h).x/{[4.(R+h)2-x2-y2].cosφ0-4.(R+h).y.sinφ0}
tanφ=y.sin(λ-λ0 )/(x.cosφ0)+tanφ0.cos(λ-λ0 )
当x=0时,
λ=λ0
sin(φ-φ0)=4.(R+h).y/[4.(R+h)2+y2]
大地坐标的经纬度到X-Y坐标信息转换如下:
(λ-φ)→(x-y):
x=2.(R+h).cosφ.sin(λ-λ0 )/[1+sinφ.sinφ0+cosφ.cosφ0.cos(λ-λ0 )]
y=2.(R+h).[sinφ.cosφ0-cosφ.sinφ0.cos(λ-λ0 )]/[1+sinφ.sinφ0+cosφ.cosφ0.cos(λ-λ0 )]
为了方便于进行正北校正,也可以将上述 (x-y)→(λ-φ)换改造成(r-β)→(λ-φ)变换,因为正北偏差校正就是方位角β的偏差校正,这里,r=x2+y2为目标在显示平面内对坐标原点的平面距离。因此,虽然正北校正非常重要,但是从数学观点看,它仅仅是坐标变换的一个组成部分。斜距、方位角到经度、纬度的变换(rh-β)→(λ-φ)已包含方位角β,可直接实现正北校正。
五、结束语
本文给出了一种多传感器异构数据接引的实现方法,描述了可适配的多源数据信号通信接口,数据质量监视和通道选择,数据保护性预处理和坐标转换和时-空对准处理。多传感器异构数据接引系统为终端区综合监视体制提供较为全面的飞行器信息,解决繁忙终端区监视手段单一、匮乏等问题,是空中交通管制系统中重要的组成。
参 考 文 献
[1]宁宣杰 基于空防雷达网络的多传感器信息融合关键技术研究及其应用[D].东北大学,2014.1-161
[2]王俊娜,雷静 多传感器信息融合及其应用综述[J].信息记录材料,2016
[3]景博,孙勇 基于集中式最优加权算法的多传感器数据融合[J] 电子测量与仪器学报;2004
[4]路志伟,李明,季晓光 基于传感器协同技术的雷达搜索空域研究[J] 航空计算技术,2006(5).5-8.
[5]李东伟,王明宇,万鹏飞 多传感器协同管理技术分析[J] 飞航导弹,2021,(7).77-79.
猜你喜欢
电脑知识与技术(2017年4期)2017-04-10 07:18:48
电子技术与软件工程(2016年16期)2017-03-17 00:34:04
现代电子技术(2016年24期)2017-01-19 14:56:30
计算机应用(2016年12期)2017-01-13 20:34:22
现代电子技术(2016年22期)2016-12-26 09:49:39
电脑知识与技术(2016年12期)2016-06-14 01:29:49
科技视界(2016年14期)2016-06-08 13:24:00
现代电子技术(2015年14期)2015-07-22 22:03:52
物联网技术(2015年5期)2015-07-18 13:08:22
现代电子技术(2014年24期)2014-12-18 11:53:51
