
基于可变形卷积时空网络的乘车需求预测模型*
2021-02-25 12:16于瑞云林福郁高宁蔚
软件学报 2021年12期
于瑞云,林福郁,高宁蔚,李 婕
1(东北大学 软件学院,辽宁 沈阳 110169)
2(东北大学 计算机科学与工程学院,辽宁 沈阳 110169)
在城市交通日渐发达的今天,建立一个高效的交通系统已成为打造智慧城市的核心问题.准确的需求预测模型,成为解决此类问题的关键.如果我们能够准确地预测出乘客的出行需求,就可以预先分配资源,即可避免空载现象发生,从而达到节约资源、缓解交通压力的目的.目前,随着滴滴、Uber 等出租车服务的日益普及,我们能够以前所未有的规模收集大量需求数据.如何利用大数据来更好地预测交通需求的问题,已经引起了人工智能研究界越来越多的关注.
本文主要研究区域乘车需求预测问题,即通过历史乘车请求数据来预测未来时间的区域乘车请求数量.随着道路上车流量逐年递增以及乘客对出租车、快车等服务需求量的不断增大,乘车服务供需不匹配的问题逐渐暴露出来.例如:有时候,一些司机因为所在区域乘客需求量较少而导致无单可接;同时,由于周边地区的乘客需求远超过出租车数量,导致大量乘客在恶劣天气或高峰时段很难乘车.所以,对出租车、快车等营利性车辆的需求预测,在近些年就越发引起研究人员重视.
以往的文献显示研究人员已经对交通数据预测进行了长期研究.其中,预测对象包括人流量、车流量、出租车需求量等.在研究初期,研究人员把城市进行区块化处理,并把其中一块区域不同时间段的车辆需求数量看作时间序列,进而对时间序列进行预测.比较有代表性的方法为:整合移动平均自回归模型(ARIMA)[1]及其相关变种,上述方法已被广泛应用于交通预测[2,3].在之前的研究基础上,Abadi 等人[4]、Wu 等人[5]以及Tong 等人[6]意识到天气、节假日、场地以及特殊事件等外在因素对城市的交通流量仍具有很大影响,所以就把此类影响因素加入到预测模型中.虽然研究表明,通过结合各类外部因素可以改善预测精度,但它们仍然无法捕捉到复杂且非线性的时空相关性.
近几年,机器学习与深度学习在国内外科研人员的不懈努力下都取得了突破性的进展,同时也给交通流量预测场景带来了新的解决方案.Yi 等人[7]与Wang 等人[8]使用深度神经网络(DNN)对交通流量进行预测并取得了较高的准确度,但Zhao 等人[9]分别使用马尔可夫模型与神经网络(ANNs)模型对出租车需求进行预测,并将结果进行对比,实验结果表明,马尔可夫模型在可预测性高的场景下效果要好于神经网络模型.由此可见:在此场景下,简单的神经网络并不能捕捉到复杂的时空相关性.
然而,深度学习在计算机视觉领域取得的成就却给了研究人员新的启发.例如:可以将整个城市的出租车需求按一定时间段切片,然后把城市每块区域内的需求数量看作一个像素点,这样就可以得到一张单位时间内的城市出租车需求图像.给定一组历史需求图像,用模型预测下一个时间戳的出租车需求图像.其中最典型的模型就包括卷积神经网络(CNN)[10]以及循环神经网络(RNN)[11]:一些学者使用CNN 及其变种模型来模拟城市复杂的空间相关性[12-14];另一些学者则使用RNN 以及长短期记忆网络(LSTM)[15]模拟城市交通流量的时序性[16-18].与之前的回归模型、神经网络等模型相比,这些开创性的尝试在性能上表现出明显的优越性.然而,这些尝试都没有同时考虑到时间和空间的相关性.近些年,Ke 等人[19]与Zhou 等人[20]则将CNN 与LSTM 相结合,使用卷积LSTM[21]对出租车需求进行预测并取得了很好的效果.在此基础上,Yao 等人[22]在AAAI2018 会议中提出在一个联合模型中捕捉空间和时间的复杂非线性关系,从而对城市交通流量进行预测,其预测效果较之前模型有很大提升.
但是该类模型也存在不足之处,模型中使用CNN 对城市流量进行空间特征提取.众所周知,传统CNN 中感受野的形状是固定的,所以在提取特征信息时,只能提取到关键像素点与其相邻区域内的特征信息.然而就实际情况而言,某一块区域内的交通情况可能与另一块相距较远的区域有很大关联[23].如图1 所示,这是将地图网格化处理后,两块在11×11 范围内且曼哈顿距离大于4 的区域乘车需求对比图.由图可得,两块区域在高峰时期需求趋势相似.然而这仅为可以被可视化的显性关联,还有很多隐性关联隐含在数据中.如果使用CNN 进行空间特征提取,很可能使这些关联在池化层进行下采样时被模糊掉,最终导致空间特征提取结果存在误差.
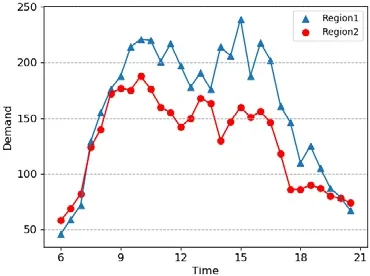
Fig.1 Comparison of demand in different regions图1 不同区域需求对比
文献[23-25]将算计视觉领域的图卷积网络(GCN)[26]应用到交通流量预测领域,以尝试解决上述问题.实验表明,其在空间特征提取上有了很大的改善.但GCN 在交通流量预测领域的应用还不完善,例如无法很好地获取各个时间片图之间的时间特征,并且部分该类模型也没有考虑到城市中兴趣点(POI)对乘车需求的影响.大量的调研[27]结果也证实了POI 对交通流量存在不可忽视的影响.
为解决以上问题,本文提出了可变形卷积时空网络(deformable convolution spatial-temporal network,简称DCSN)模型.其使用可变形卷积网络(DCN)[28]与LSTM 共同捕捉空间和时间的复杂非线性关系,并使用图结构来模拟各区域间POI 和出租车需求的相似关系.如图2 所示:之所以使用DCN 来对城市交通空间特征进行提取,因为DCN 可以改变卷积核映射在目标图像上感受野的形状,使得不相邻且相对较远的两块区域的空间特征也能保留下来,进而解决传统CNN 模型提取城市交通流量空间特征信息时误差较大的问题.但如果将整个城市的出租车需求视为图像并在此图像上应用DCN 模型,是无法取得最佳效果的.因为通过研究发现,在预测目标区域中包含相关性较弱的区域实际上会损害模型性能、降低预测准确度.所以,本文借鉴了Yao 等人[22]论文中仅对局部区域做特征提取的方法,仅对要预测目标附近区域使用DCN 模型.然而所选区域的大小对模型至关重要,本文对其大小进行对比实验,既保证DCN 在CNN 的基础上提取到更多不相邻的空间特征,也保证DCN 模型不被相关性较弱的区域影响.只对目标附近区域做特征提取显然是不够全面的,通过研究[6,22]发现:POI 整体差异较小且乘车需求波动相似的两块区域,在需求预测问题上可以为彼此提供助力.所以,本文对距预测目标较远区域基于POI 差异进行需求建模,通过图结构来捕捉两个区域需求的潜在关系,并使用嵌入算法将区域信息以向量形式嵌入到模型中.本文使用滴滴出行的真实订单数据进行大量实验,实验结果表明,本文提出的方法优于其他现有车辆需求预测方法.

Fig.2 Comparison of convolution patterns between CNN and DCN图2 CNN 与DCN 的卷积模式对比
本文的主要贡献概括如下:
• 本文提出,使用由可变形卷积时空模型以及POI 需求关联模型组成的联合模型来对区域车辆需求进行预测,它同时考虑了时间、空间以及不同区域的需求关联性等因素;
• 在可变形卷积时空模型中,使用DCN 与LSTM 提取时空特征;在POI 需求关联模型中,使用区域间的POI 差异化指数以及需求差异化指数来捕捉区域间的需求相似关系.
1 相关工作
交通流量预测问题在众多研究学者多年来的探索实践下,取得了许多突破性的进展.从传统统计学方法到机器学习与深度学习,都在使预测精度逐渐提高.本节将主要讨论与交通流量预测的相关工作.
Li 等人[2]提出了一种基于ARIMA 的预测方法来预测热点地区乘客的时空变化,以帮助司机找到他们的下一位乘客.Moreira-Matias 等人[3]使用滑动窗口集合框架,将时变泊松模型、加权时变泊松模型和ARIMA 模型相结合,对乘客需求进行预测,并取得了不错的效果.
Abadi 等人[4]进一步考虑了外部环境数据(例如场地以及特殊事件等)对交通流量预测的影响,并基于自回归模型对交通流量进行预测.Wu 等人[5]通过实验揭示了天气与城市交通数据间隐藏的相关性.Tong 等人[6]结合POI 信息提出具有高维度特征的统一线性回归模型LinUOTD,并设计了一系列的优化技术来对模型进行有效的训练和更新.模型突出的灵活性,使其在交通流量预测场景取得不错的效果.虽然此类方法结合外部因素使预测精度有所提升,但它们仍然无法捕捉到复杂且非线性的时空相关性.
随着机器学习与深度学习的飞速发展,研究人员们尝试使用神经网络解决交通流量预测问题.Yi 等人[7]使用实时交通数据利用DNN 对交通流量进行预测,其实验结果表明,该模型具有较高的准确性.Wang 等人[8]受到残差神经网络(ResNet)[23]的启发,提出一个名为“深度供需(DeepSD)”的端到端框架,其框架具有高度的灵活性和可扩展性,可利用多个数据源(例如打车指令、天气数据和交通数据)来实现对交通流量的高精度预测.Zhao等人[9]使用ANN 模型对出租车需求进行预测,实验结果表明:在可预测性高的场景下,马尔可夫模型预测精度为89%,比神经网络模型高11%.可见,传统神经网络在此场景下表现并不理想.
进而,研究人员又把目光投向了近些年在计算机视觉领域声名鹊起的CNN.Wang 等人[12]和Zhang 等人[13]将城市交通流量视为图片,进而使用CNN 及其变种ResNet[29]对交通流量进行预测.Liu 等人[14]提出一个面向时空数据的大规模车辆需求预测集成框架,其使用注意力机制将多个基础模型和3 个注意力模块(通道注意力模块、空间注意力模块和位置注意力模块)组合在一起,进而提高原有基础模型的性能.其中,空间注意力模块使用卷积网络进行空间特征提取.以上方法都取得了很好的成绩,但因为传统CNN 固定的卷积模式,导致提取空间特征时产生了一定的误差;此外,虽然这些方法确实使用历史时间戳的交通图像进行预测,但它们没有明确地模拟时序依赖性.进而,Zhao 等人[18]使用LSTM 网络通过由许多存储器单元组成的二维网络来模拟交通系统中的时空相关性,进而对交通流量进行预测.遗憾的是:他们在考虑交通流量的时序变化时仅模拟了单块区域的时序依赖性,却忽略了各个区域间的空间关联性.
通过多年的不懈研究和不断改进,终于有学者将时序依赖性和空间关联性结合到一起.Ke 等人[19]与Zhou等人[20]使用卷积LSTM 来处理出租车需求预测的时空依赖性.在此基础上,Yao 等人[22]提出了一个深度多视图时空网络(DMVST-Net)框架来模拟空间和时间关系,从而对出租车需求进行预测.其模型包括3 个视图:时间视图、空间视图和语义视图.通过使用大量真实出租车数据集进行实验,证明该模型预测效果优于上述方法.然而该模型也存在不足之处,如未解决传统CNN 在交通流量预测场景下的误差问题以及并未考虑城市中POI 对出租车需求的影响等.
总体来说,与上述研究方法相比,本文提出的DCSN 模型创新点在于设计并结合了可变形卷积时空模型与POI 需求关联模型.即:使用DCN 与LSTM 共同捕捉空间和时间的复杂非线性关系,并基于POI 差异指数以及历史需求差异指数对不同区域需求相似性进行建模.最后将两个模型输出,通过全连接神经网络得出最终的预测结果.
2 算法设计
图3 展示了本文所提出的DCSN 模型总体框架图,其主要由两部分组成,分别为可变形卷积时空模型与POI需求关联模型.其中,可变形卷积时空模型包括DCN 与LSTM,使用DCN 卷积对不同时间片同一块区域做空间特征提取.输出的特征向量与当前时间片的天气、温度等上下文特征相连接作为LSTM 中一个时间单元的输入,可变形卷积时空模型最终的输出为时空特征向量.POI 需求关联模型首先构建区域的加权图(POI 差异指数和历史需求差异指数为权重影响因子);将所要预测的区域节点编码为向量,将两个模型输出的向量相连接,再使用全连接网络进行联合训练;最后,得出区域需求预测结果.

Fig.3 DCSN model overall architecture diagram图3 DCSN 模型整体架构图
2.1 问题定义
本小节将对出租车需求预测问题进行定义.将地图进行网格化处理.L={l1,l2,…,ln}为城市地图中的所划分的区域集合,其中,n为将地图划分的网格数量;T={t1,t2,…,tm}为按相等时间间隔划分的时间片集合,其中,m为时间片数量总和.解决区域出租车需求预测问题的实质,即为使用前h个时间片的乘车需求来预测第h+1 个时间节点该区域的需求数量.结合本文提出的模型,其主要问题具体可表达为

其中,
•PL为区域的POI 信息.
公式中,h为时间步长.公式整体意为:将前h个时间片的乘车需求信息、天气信息以及区域POI 信息输入到本模型中,最终得出当前区域下一时间片的出租车需求数量.
2.2 可变形卷积时空模型
可变形卷积时空模型由时间和空间两部分组成,如图3 所示.本文使用DCN 对地图区域中的需求进行空间特征提取,进而将其结果应用于LSTM 模型中模拟出租车需求的时间依赖性.接下来,本小节将着重对这两个部分进行分析讲解.
2.2.1 空间特征:局部DCN 模型
DCN 在CNN 的基础上引入了两个全新的模块(即可变形卷积模块与可变形RoI 池化模块),其主要思想为:从目标任务中学习偏移量,然后使用额外的偏移量来改变模型中的空间采样位置,从而有效提升CNN 的泛化能力.本文研究发现,DCN 通过学习偏移量改变感受野范围的特性.在此场景下,能更好地模拟空间相关性,从而提取出更为准确的特征信息.
本文使用DCN 对地图区域间的需求进行空间特征提取时,借鉴Yao 等人[22]论文中所使用的局部分解方法,仅将要预测的区域以及其周围信息输入到模型中.在不同的时间片中,本文将每个区域及其周围邻域的乘车需 求数量视为具有一个通道的s×s图像集合(图像中,城市边界缺失部分用0 补齐),其中,尺寸s控制空间粒度.对于区域i的不同时间片t,都可以得到二维张量图像,进而将输入到DCN 模型中进行卷积.对于中一个像素x0的卷积操作可表示为

其中,R={(-1,-1),(-1,0),…,(0,0),…,(1,0),(1,1)}表示卷积核为3×3 的感受野网格,网格中心点坐标(0,0)映射到要做卷积操作的像素点x0.W(·)表示获取卷积核中对应位置的卷积权重,d(·)表示获取张量图像中对应像素点的值.DCN 与CNN 的主要差别就在于Δrn,即为上文所提到的偏移量,通过对像素点周围部分图像卷积所得.具体形式为二通道矩阵,分别对应横纵坐标偏移量.
对单一像素点的卷积过程如图4 所示.
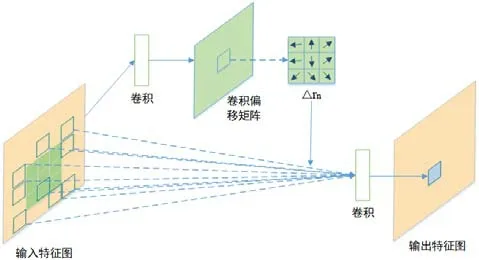
Fig.4 Deformable convolution process schematic图4 可变形卷积过程示意图
本文将区域i不同时间片t的乘车需求特征图馈送到K个卷积层,第k层卷积表达式如下:

2.2.2 时间特征:LSTM 模型
本文使用LSTM 来捕获乘车需求时序相关性,该模块的基本表达式为

2.3 POI需求关联模型
本文通过研究发现,空间上不相近的两块区域在乘车需求上也可能存在相似关系.例如:大型商场所在的区域在周末可能具有较高的乘车需求,而居民区所在的区域在工作日的清晨将迎来乘车需求高峰等.因为前面所提到的局部DCN 模型仅提取目标像素点邻近区域的空间相似性,所以本文从POI 以及历史需求两个方面来提取较远区域间的相似关系.这样即可与局部DCN 模型相互补充,使模型预测结果更加准确.
因为在地图中每块区域皆可互通,所以本文将目标地图按区域划分后转换成一张无向完全图,具体定义为G=(V,E,W).V为节点集合,对应城市地图中的所划分的区域集合L;E为图中点与点之间边的集合;W为每条边上的权重,即表示两个区域之间的相似程度.W的表达式为

其中,Dm与Pij分别为区域间的POI 差异化指数与需求差异化指数,将在接下来的部分着重讲解求解方法.δ(·)为min-max 标准化方法,为了避免因两个差异化指数数值上差距过大从而对结果造成影响;α则是为了权衡两种差异化指数对权重大小的影响,本文通过多次实验得出,当α取值在0.4 与0.6 之间时,模型准确性最高,所以本文将其最优区间平均数0.5 作为α的最终取值.
2.3.1 区域POI 差异化指数
现实生活中,POI 对其所在的区域乘车需求影响非常大,所以本文提取不同区域间的POI 相似性,并将其嵌入到模型中.本模块着重考虑地铁站、公交车站、旅游景点、大型商场、医院、学校以及居民区这七类不易变更的POI,使用线性神经网络模型[30]提取不同种类POI 对乘车需求的影响权重.其中,线性神经网络的输入为各个区域不同种类POI 的数量以及当前区域各个时间片乘车需求数量的总和,训练得出的不同种类POI 对乘车需求的影响权重即为所求.表达式如下:


2.3.2 区域需求差异化指数
经本文研究发现:在捕捉两个区域的相似关系时,不仅要从POI 功能的角度出发,还应该考虑两个区域需求序列的相似性.本模块以周为单位对各个模块每个时间片的乘车需求数量取平均值,得出各区域一天的需求序列.进而对不同区域间的需求序列使用动态时间规整算法(DTW)[31]求出区域需求差异化指数,其计算公式如下:

其中,Si,Sj代表两个不同区域的平均需求序列,DTW(·)为动态时间规整算法,Dm即为所求区域需求差异化指数.
得到区域POI 差异化指数Pij及区域需求差异化指数Dm后,即可使用公式(5)完成无向完全图中,边权重W的计算.在获取完整的图信息后,本文使用Node2vec 图嵌入方法[32]将区域节点i转化为多维向量gi.为使嵌入的多维向量gi能与整个网络架构进行协同训练,本模块将区域节点i的特征向量馈送到全连接层,其公式定义为

其中,Wpd与bpd都为可学习的参数,即为整个POI 需求关联模型的输出.
2.4 模型整合
为了使前面两小节的模型相关联,本小节将可变形卷积时空模型输出的特征向量与POI 需求关联模型输出的特征向量相连接,进而得到向量.此时,已经包含区域i的时空以及POI 等特征,最后将其馈送到全连接网络以获取区域i的最终需求预测值.最终预测函数如下:

其中,Wf与bf都为可学习的参数.因为真实的需求值经过标准化处理,所以σ(·)为Sigmoid函数使最终输出的 区间为[0,1],目的为使整个模型更快收敛.模型使用的损失函数定义为

其中,γ为超参数.上述损失函数实际由均方误差和平均绝对百分误差两部分组成.因为均方误差易受极端值影响,为了避免训练被大值样本支配,所以引入平均绝对百分误差.
3 实验与结果分析
3.1 数据集处理
本文使用快车平台真实的订单轨迹数据CD2Data 与XA2Data 来验证模型的有效性,数据集来自滴滴出行“盖亚”数据开放计划.
• CD2Date:数据为2016 年10 月和11 月成都市二环部分区域快车平台订单数据;
• XA2Date:数据为2016 年10 月和11 月西安市二环部分区域快车平台订单数据.
本文将两个数据集中2016 年10 月8 日至2016 年11 月23 日(共47 天)的数据作为训练集,2016 年11 月24 日至2016 年11 月30 日(共7 天)的数据作为测试集.数据集中,2016 年国庆假期期间的数据因为较平时相比波动过大所以舍弃.处理数据时,本文将两个数据集所对应的区域进行网格化处理,划分成20×20 个小区域.并且仅将早6 点到晚21 点之间的数据作为观测数据,每个时间片的时间跨度设为半小时.进而提取出每块区域每个时间片的需求数量.值得注意的是:因为本文主要分析的问题为乘车需求预测,所以订单的位置以乘客的初始位 置为准.最后将单位需求数据进行标准化处理,进而得到所有区域单个时间片的需求数据集合.DCSN 模型 除了应用到了乘车的轨迹数据,还应用了外部数据以及城市的POI 数据.本文将天气等外部离散数据转化为One-Hot 向量嵌入到模型中;POI 数据则使用百度地图信息检索功能获取,同样将其进行网格划分,进而统计每块区域的POI 种类及数量.
当测试预测结果时,本文使用待预测时间片的前8 个时间片(即前4 小时)来对该区域接下来的乘车需求进行预测.并且在实验过程中,本文过滤掉了区域需求小于5 的样本,这是工业中常用的做法.因为在现实生活的应用程序中,人们并不关心这种低需求场景.
3.2 实验参数设置
本文基于Tensorflow 和Keras 框架实现DCSN 模型.在空间特征提取时,控制输入特征图大小的s取11,即对目标及其周围11×11 的区域进行空间特征提取.在DCN 模型中,本文将卷积层数K设为3,滤波器大小设为3×3,滤波器数量设为64.经过多次对比实验后,本文将LSTM 模型中时间步长h设为8.在DCSN 模型中,除了作为最终预测组件的全连接层,其中的激活函数为Sigmoid函数,其余全连接层中的激活函数皆为ReLU函数.模型的损失函数已在第2.4 节中具体说明,模型使用的优化算法为Adam.
本文使用平均绝对百分比误差(MAPE)和均方误差(RMSE)作为评价指标,其具体计算公式下:

3.3 对比实验结果分析
本小节将DCSN 模型与以下5 种主流及最新的交通流量预测方法进行比较.
• 历史均值法(HA):使用历史流量的平均值来作为下一时间片的预测值.此处,本文同样使用前8 个时间片的历史数据来预测下一时间片的乘车需求数量;
• ARIMA 是一种众所周知的时间序列预测模型,它结合了移动平均和自回归分量来建模时间序列;
• LSTM 在传统RNN 的基础上改进,新增遗忘门等机制,有效解决传统RNN 所存在的梯度爆炸和梯度消失等问题.作为目前解决时间序列预测问题的主流算法之一;
• ST-ResNet[13]:ST-ResNet 是一种基于深度学习的流量预测方法,该方法将不同时间片的城市交通流量绘制成图像,然后使用残差神经网络提取图像特征,进而完成流量预测;
• DMVST-Net[22]:DMVST-Net 是一种基于多视图的深度学习框架,用于出租车需求预测.它由3 个不同的视图组成,分别为时间视图、空间视图和语义视图.
为了对比公平,在实验时,除HA 与ARIMA 外的其他算法都使用公式(11)所定义的损失函数.DCSN 模型与其他5 个主流交通流量预测方法性能对比见表1.
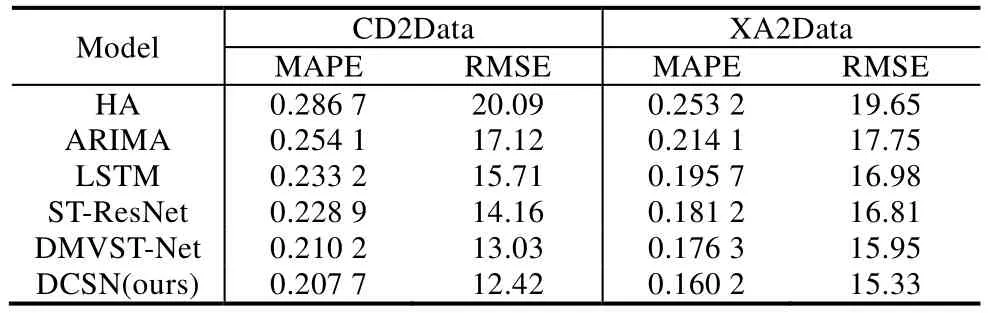
Table 1 Performance comparison of different approaches表1 不同方法性能对比
表1 显示了本文所提出的模型与其他基准算法在数据集CD2Data 与XA2Data 上的性能对比.DCSN 模型在所有方法中实现了最低的MAPE 和最低的RMSE.更具体地说,HA 和ARIMA 等传统方法因为完全依赖于历史需求值并且建模能力有限,所以预测表现不佳.LSTM 与ST-ResNet 在预测时考虑空间特征和时间特征对交通流量的影响,使预测误差较传统方法大大降低,但并未将二者相结合.DMVST-Net 模型使用三层视图将时空特征以及外部特征相融合,取得了非常不错的预测效果.本文所提出的DCSN 模型在DMVST-Net 模型的基础上进行改进,使用DCN 进行空间特征提取,并将POI 对乘车需求的影响因素加入到模型中,使模型的预测性能进一步提升.
DCSN 模型的平均训练时长为47.2s/轮,基准算法中效果最好的DMCVST-Net 模型的平均训练时长为45.4s/轮.因为使用DCN 代替了CNN 并加入了POI 需求关联模型,所以使前者的模型复杂性略高于后者.但整体训练时长差距不大,且DCSN 模型准确性得到显著提升.
3.4 消融实验结果分析
本文为了研究DCSN 模型内部各改进之处对性能的影响,在CD2Data 数据集下分别对其进行消融实验.
• CLN:仅包含时空模型,但将本文的可变形卷积时空模型中的DCN 用传统CNN 替代.即,仅使用CNN和LSTM 的组合对乘车需求进行预测;
• DLN:仅使用本文所提出的可变形卷积时空模型对乘车需求进行预测,不包含POI 需求关联模型;
• CLMN:在CLN 的基础上添加需求关联模块,但公式(5)中α取1,即,仅考虑区域需求差异化指数对模型的影响;
• DLMN:在DLN 的基础上添加需求关联模块,同样,α取1;
• CLPDN:在CLN 模型的基础上加入本文所提出的POI 需求关联模型;
• DCSN:为本文所提出的完整模型.
此外,本文还对DCSN 模型中所使用的损失函数进行消融实验,以找出最优的损失函数.所作对比如下.
• LMSE:仅使用最常用的均方误差(MSE)作为模型的损失函数;
• LMAPE:仅使用MAPE 作为模型的损失函数;
•L:模型最终使用的损失函数,结合了均方误差和平均绝对百分误差,其中,γ取0.01.具体形式已在第2.4节中详细说明.
各方案性能对比如图5 所示.
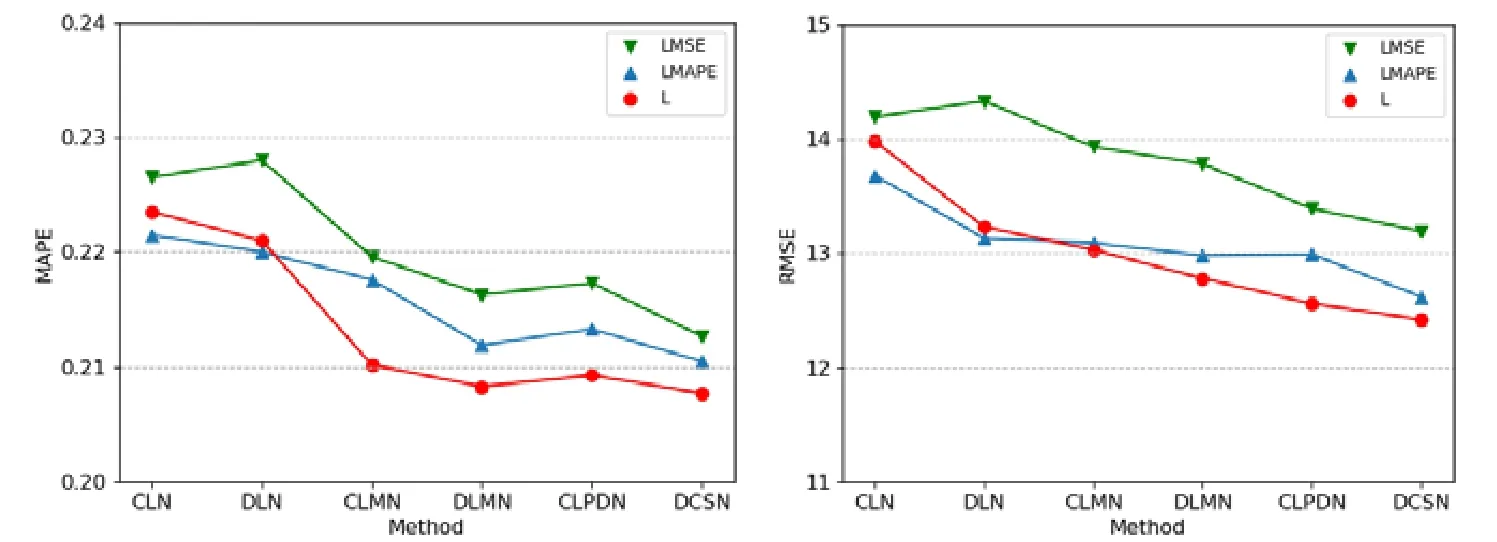
Fig.5 Improved program performance comparison chart图5 改进方案性能对比图
DLN 模型在CLN 模型的基础上将卷积神经网络改进为可变形卷积神经网络,从结果来看,模型整体效果有所提升.所以可以证明:可变形卷积神经网络在此场景下提取空间特征信息,可以取得很好的效果.CLMN 模型与DLMN 模型在DLN 模型与CLN 模型的基础上加入了仅考虑区域需求差异化指数的需求关联模型,使得模型的准确性得到显著提升.最后两个模型则在前两个模型的基础上加入了完整的POI 需求关联模型,从图中可以看出,预测误差大大减小,证明了在POI 需求关联模型中POI 差异化指数的必要性.POI 需求关联模型既将POI对乘车需求的影响因素加入到模型中,又弥补了局部DCN 模型在空间上的距离局限性.同时可以看出,本文所使用的损失函数L效果最好.所以综上所述,当前DCSN 模型效果最佳.
本文还在实验过程中对DCN 模型中输入特征图尺寸s的大小以及滤波器的大小做了调优实验.特征图的尺寸对局部DCN 模型很重要,这决定模型将提取目标区域周围多大范围内的空间特征信息.同样,滤波器的大小本身也是DCN 模型的重要属性,所以在CD2Data 数据集下对其进行调优实验.卷积层数都设为3,具体实验结果如图6 所示.

Fig.6 Tuning experiment results comparison chart图6 调优实验结果对比图
由实验结果可以得出,DCN 模型中输入特征图尺寸s取11 并且滤波器尺寸为3×3 时模型性能最佳,故模型实验最终采用此参数.
本文研究发现,时间步长h是进行时间特征提取的重要参数.为了确定其对模型性能的影响,所以本文在CD2Data 数据集下对h的不同取值进行对比实验.具体实验结果见表2.

Table 2 Performance comparison of different sequence length表2 不同时间步长性能对比
由表2 可以得出,模型误差整体上随时间步长h的增长而下降.由此可以说明时间步长对时间特征提取的重要性.当时间步长为8 时,模型性能最佳.此外,h增加到8 以上时模型性能略有下降.一个潜在的原因是:在考虑更长的时间依赖性时,需要学习更多的参数,进而使训练变得更加困难.
4 总 结
本文在乘车需求预测场景下对传统时空模型进行改进,提出多组件的可变形卷积时空网络DCSN.本模型将传统时空模型中的卷积神经网络改进为可变形卷积神经网络,使对目标区域的空间特征提取效果得到提升.本文还将POI 对乘车需求的影响因素加入到模型中,弥补了局部DCN 模型在空间上的距离局限性,使DCSN 模型效果优于其他已有的乘车需求预测方法.
未来,本文将在两个主要方面对模型进行改进.将更多对乘车需求有显著影响的外部因素进行更合适的建模,并将其嵌入到模型中;本文在进行预测时仅考虑了近4 个小时的历史需求对未来需求的影响,在接下来的研究中,本文将进一步考虑长周期(如日或周)历史数据对未来需求的影响并将其加入到模型中,使预测结果更加准确.
致谢实验数据来自滴滴出行“盖亚”数据开放计划.
猜你喜欢
四川党的建设(2022年8期)2022-04-28
小学生学习指导(低年级)(2020年11期)2020-12-14
疯狂英语·爱英语(2020年3期)2020-06-23
建材发展导向(2019年11期)2019-08-24
作文大王·低年级(2018年10期)2018-12-06
中国交通信息化(2018年7期)2018-09-14
数学小灵通(1-2年级)(2017年9期)2017-10-13
小猕猴智力画刊(2016年5期)2016-05-14
中国交通信息化(2014年11期)2014-06-05
中国交通信息化(2014年8期)2014-06-05
