
动量式光纤气体流速传感器的设计与建模
2021-02-25 11:40钟丽琼王廷均
仪表技术与传感器 2021年1期
胡 浩,钟丽琼,王廷均,浦 创
(贵阳学院机械工程学院,贵州贵阳 550003 )
0 引言
在工业生产、环境监测、气象研究、航空航天、内燃机控制等许多领域均会对气体流速这一重要的参数进行测量,测量气体流速一般会使用流速传感器,而针对气体流速测量的专用传感器种类并不多见,应用中选择余地较小,甚至某些检测场合选择不到适合的传感器,因此,相关学者也在积极研发新型的气体流速传感器,以使其更好的适应社会发展的需求。例如,付敬奇等人研制了一种利用微型旋桨作为敏感元件来测量流场流速的气体流速流向传感器[1];宋彦峥等应用热膜风速计原理,设计了一种测量内燃机进气流速流向的传感器[2];J. Chen等提出了一种基于昆虫风速接受器原理的,用以测量低速气体流速的传感器[3];林定选提出了一种采用MEMS技术,具有双桥结构的硅气体流速传感器[4]。上述文献均在气体流速传感器的开发中有所创新,但迄今为止相关报道并不多见。在此背景下,本文拟把光纤传感技术应用于气体流速传感器的研发中,光纤传感技术作为一种新兴的传感技术,具有许多其他传感技术无法比拟的优点,也被越来越多的应用于现代传感器的研究[5-11]。正因如此,本文提出了一种基于光纤强度调制原理的动量式气体流速传感器,利用流体动力学原理把被测气体的流速转换为参考气体的压差,利用光纤强度调制原理得到压差变化大小,再推导出被测气体流速的大小,从而实现对气体流速的检测。
1 传感器设计
1.1 传感器探头
如图1所示,为动量式光纤气体流速传感器的探头结构,传感器主要由流体耦合部分与压差测量部分组成。流体耦合部分包括流体耦合腔,腔内设计被测流体流道,流体由流入孔流进,在与参考气源发射喷嘴喷射出来的紊流射流作用后,经流体流出孔流出。压差测量部分包括左右端盖、活塞杆、弹簧、活塞、密封圈、缸体、反光片、光纤束、排气孔、过滤网、引流口等结构,该部分利用光纤强度调制原理完成对动量耦合后的气体的压差测量。设计中,活塞能在缸体内自由滑动,活塞滑动带动活塞杆在滑道内左右移动,左右腔内装配的弹簧起到使活塞复位的作用,活塞杆在滑道内的移动使反光片与光纤束的距离发生变化,入射到反光片上的光经反光片反射后耦合进接收光纤的光强度发生变化,通过检测出光强度变化的大小,就能判断出活塞移动的距离。活塞位移的大小又由压差测量部分左右检测腔内气源射流产生的压力差所决定。

图1 传感器探头结构
1.2 工作原理
图2为传感器动量耦合部分的作用原理图。图2(a)为没有被测气流作用,此时参考气源发射喷嘴喷射出来的紊流射流在没有外界气流干扰时,通过压差检测部分的引流口等量进入到压差检测腔内,由于其左右气流压力相等,压差检测部分的活塞不会发生移动,传感器输出光强度就不会发生变化;图2(b)为有被测气流作用,此时被测流体以一定的流速流入检测腔,气源进口处也持续流入恒定的参考射流,二者在检测腔内发生交汇,气源射流会在被测气流的作用下发生一定的偏移。那么,气源射流进入到左右压差检测腔内的压力就会不相等,压差检测部分的活塞在气源压差的作用下发生移动,传感器输出光强度就会随之发生变化。因此,测试出此时气源射流的压力差就能计算出被测流体的流速。

图2 动量耦合原理图
1.3 传感器系统
图3为动量式流体流速传感器的系统图,整个传感器系统由光源、入射光纤、Y型耦合器、传感器探头、接收光纤、光电转换器、信号处理模块等部分组成,光源发出的光信号通过Y型耦合器平均分配给左右检测腔的入射光纤,左右检测腔接收光纤接收到的随压差变化的光强信号,传输到光电转换器转换为电信号,再经信号调理,并做除法运算,得到最终的输出值,通过除法运算能够提高传感器的灵敏度。

图3 传感器系统图
2 数学模型
为了建立传感器的数学模型,首先分析气源射流与被测气流相互作用时,气源射流产生的压差大小与两气流动量的关系。假设气源射流的流速为vs,被测气流的流速为vb,气源射流的动量为Ms,被测气流的动量为Mb,传感器压差检测腔内气源射流产生的压差大小为Δp,那么此时Δp与两气流的动量比有关,可表示为:
(1)
又气流的动量与气流流速的平方成正比,气流动量可分别表示为:
(2)
式中ks、kb分别为比例常数。
(3)
传感器压差检测部分利用了光纤强度调制原理,此时的强度调制模型为[12]:
(4)
式中:x11、x12分别为检测腔两侧反射光的光锥端面半径;θ11、θ12、θ21、θ22分别为检测腔两侧反射光的光锥端面与光纤束接收光纤端面相交的圆心角;r为接收光纤半径。
x11=r+2d1tan(arcsinNA)
x12=r+2d2tan(arcsinNA)

式(3)与式(4)合并有:
(5)
式(5)即为传感器的数学模型,不难看出,当传感器的结构确定以后,传感器的数学模型仅为与两射流速度vs、vb有关的函数,H为无量纲参量。
3 实验结果与分析
依据伯努利方程,为了简化计算,假设压力差Δp与两流体流速的平方之比成近似线性关系。

利用仿真软件对上述传感器的数学模型进行计算,分别分析检测腔结构参数有效截面积S、弹簧刚度k1、光纤束与反光片初始距离d0对输出信号的影响,喷嘴射流流速vs对输出信号的影响,仿真时光纤束相关参数分别取NA=0.35、d0=0.8 mm、r=1 mm。
3.1 检测腔结构参数对输出信号的影响
图3~图5分别为不同结构参数时传感器的输出信号vb—H曲线,即分别对结构参数S、k1、d0取不同数值时,传感器的输出值H与检测量vb之间的变化关系。

图3 有效截面积S变化时的vb-H曲线

图4 弹簧刚度k1变化时的vb-H曲线

图5 初始距离d0变化时的vb-H曲线
图3为传感器检测腔活塞的有效截面积S分别取300 mm2、340 mm2、380 mm2、420 mm2,其余参数相同时的vb-H曲线。从上图中不难看出,不管检测腔活塞的有效截面积S如何变化,传感器的输出值H随着检测量vb的增加而增加。当检测腔活塞的有效截面积S=300 mm2时,传感器的输出值最大约为2.4,其灵敏度为0.7 m-1·s-1;当检测腔活塞的有效截面积S=340 mm2时,传感器的输出值最大约为2.8,其灵敏度为0.9 m-1·s-1;当检测腔活塞的有效截面积S=380 mm2时,传感器的输出值最大约为3.4,其灵敏度为1.2 m-1·s-1;当检测腔活塞的有效截面积S=420 mm2时,传感器的输出值最大约为4.1,其灵敏度为1.55 m-1·s-1。传感器的灵敏度随着活塞的有效截面积S的增大而增大,因为活塞面积越大,在相同的差压作用下,活塞受力就越大,则移动的位移就越大,因此其灵敏度就越高。
图4为传感器检测腔内弹簧的刚度k1分别取0.1 N/mm、0.15 N /mm、0.2 N/mm、0.25 N/mm,其余参数相同时的vb—H曲线。从图中可以看出,不论k1取何值,传感器的输出值H也随着检测量vb的增加而增加。当k1=0.1 N/mm时,传感器的输出值最大约为7.9,其灵敏度为3.45 m-1·s-1;当k1=0.15 N/mm时,传感器的输出值最大约为2.9,其灵敏度为0.95 m-1·s-1;当k1=0.2 N/mm时,传感器的输出值最大约为2.1,其灵敏度为0.55 m-1·s-1;当k1=0.25 N/mm时,传感器的输出值最大约为1.8,其灵敏度为0.4 m-1·s-1。传感器的灵敏度随着弹簧刚度的增大而减小,因为弹簧刚度越大,在相同的差压作用下,弹簧变形量就小,则移动的位移就小,因此其灵敏度就越低。
图5为传感器检测腔内光纤束与反光片的初始距离d0分别取0.8 mm、0.9 mm、1.0 mm、1.1 mm,其余参数相同时的vb-H曲线。从图中可以看出,传感器的输出值H同样随着检测量vb的增加而增加,这一趋势与d0的取值无关。当d0=0.8 mm时,传感器的输出值最大约为3.7,其灵敏度为1.35 m-1·s-1;当d0=0.9 mm时,传感器的输出值最大约为2.7,其灵敏度为0.85 m-1·s-1);当d0=1.0 mm时,传感器的输出值最大约为2.2,其灵敏度为0.6 m-1·s-1;当d0=1.1 mm时,传感器的输出值最大约为1.9,其灵敏度为0.45 m-1·s-1。传感器的灵敏度随着初始距离的增大而减小,因为初始距离越大,接收光强度随着活塞移动的变化就不够明显,因此其灵敏度就越低。
从上述分析可知,为了提高传感器的灵敏度,在设计中应选取较大的活塞有效截面积,但活塞面积也不宜过大,因为过大会造成传感器的尺寸结构过大,加工材料需求过多,经济性与实用性降低;选取较小刚度的弹簧,但弹簧刚度的大小又决定了传感器的检查范围,所以也要根据具体的检测范围选取;选取较小的光纤束与反光片的初始距离,不过这一距离也不能过小,太小会造成反射光无法耦合进入到接收光纤之中,从而无信号输出。
3.2 喷嘴射流流速对输出信号的影响
图6~图9分别为不同的喷嘴射流流速时传感器的输出信号vb-H曲线,曲线反映了喷嘴喷射不同流速流体时,传感器的输出值H与检测量vb之间的变化关系。

图6 vs=4 m/s时vb-H曲线

图8 vs=8 m/s时vb-H曲线
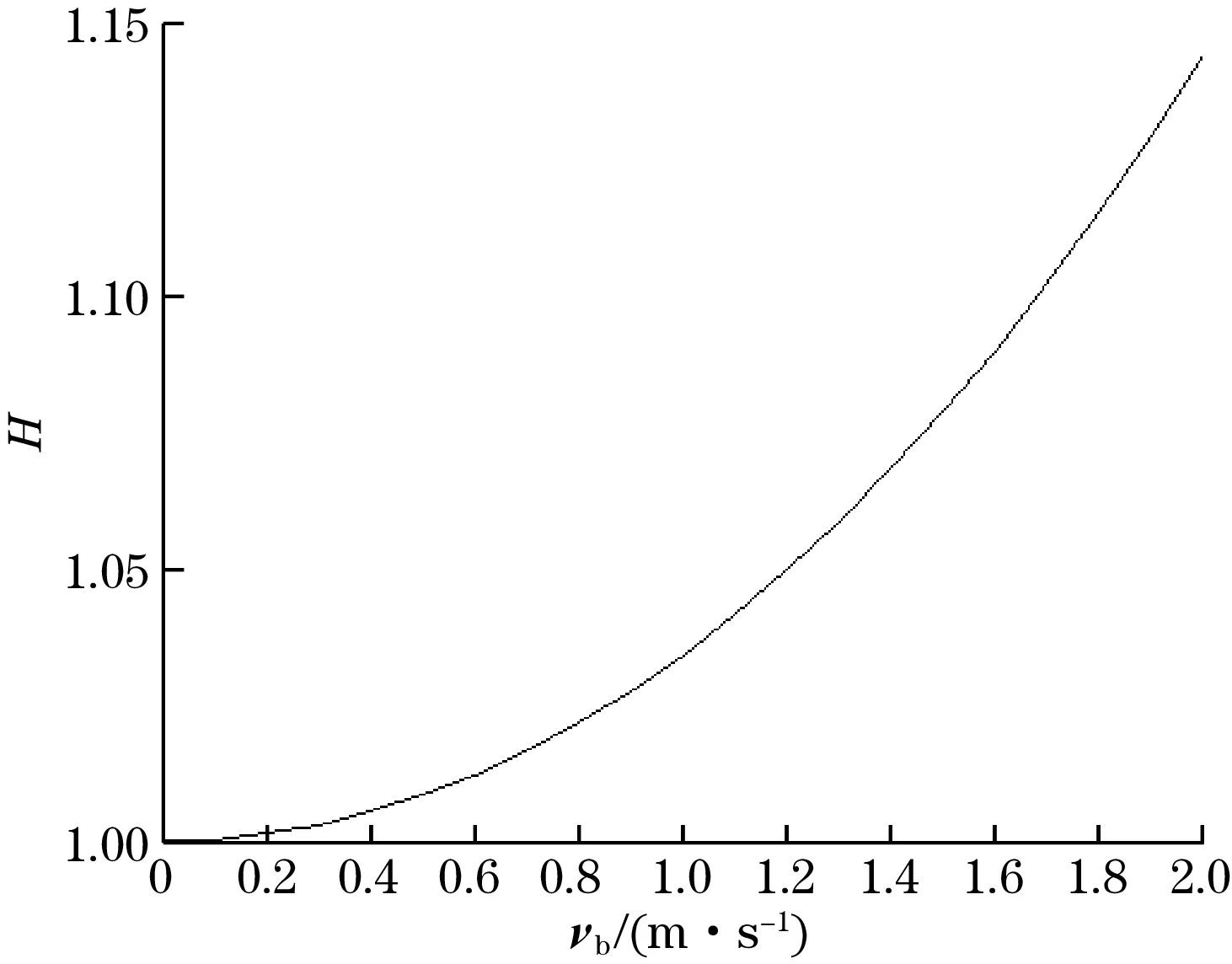
图9 vs=10 m/s时vb-H曲线
从图6~图9不难看出,不论喷嘴射流流速取多大,传感器输出值H均会随着被测流体流速的增加而增大,在一定的检查范围内,vb-H曲线均呈现递增趋势,且随着vb的增大,其曲线的斜率也增大,说明输出值H增大的速度在加快。这是因为随着被测流体流速的增加,被测流体的动量就增大,在喷嘴射流流速稳定时,会使喷嘴射流发生偏移的角度增加,从而导致进入到差压检测腔两侧的流体产生更大的压差,这样,差压检测腔低压侧反光片会靠近光纤束,使其输出光强度减小,而高压侧反光片会远离光纤束,使其输出光强度增大,传感器的最终输出值H即为检测腔高压侧输出光强度信号与低压侧输出光强度信号之比,所以随着vb的增大,输出值H的分子和分母一增一减,其比值会加速增大,最终形成一条快速递增的曲线。从图6可知,当vs=4 m/s时,最小输出值为1,这是因为此时vb=0,喷嘴射流不会发生偏移,检测腔内无压力差,所以输出值H为1。最大输出值约为2.55,其灵敏度约为0.775 m-1s-1;从图7可知,当vs=6 m/s时,最小输出值为1,最大输出值约为1.47,其灵敏度约为0.235 m-1·s-1;从图8可知,当vs=8 m/s时,最小输出值为1,最大输出值约为1.24,其灵敏度约为0.12 m-1·s-1;从图9可知,当vs=10 m/s时,最小输出值为1,最大输出值约为1.14,其灵敏度约为0.07 m-1·s-1。从上述分析可以得出,随着vs的取值增加,传感器在检测相同范围流速时,其灵敏度会降低,这是因为喷嘴射流流速越大,相同流速的被测射流对其产生的影响就越小,使其偏移的程度就会越小,因此输出值变化就小。所以,为了提高传感器的灵敏度,喷嘴射流的预定流速与被测射流的流速相差不宜过大,且vs取vb最大值的2倍较好。
4 结束语
本文设计了一种新型的动量式光纤流速传感器,传感器主要由流体耦合部分与压差测量部分组成,通过测定压差检测部分输出光强度的变化来确定流体耦合部分的被测射流流速大小。并在传感器结构设计的基础上,依据光纤的强度调制原理建立出了传感器的传感模型H,当传感器的结构确定以后,该数学模型仅为与两射流速度vs、vb有关的函数。最后从检测腔结构参数与喷嘴射流流速两方面分别分析了其对输出信号的影响,分析得出在设计中应选取较大的活塞有效截面积;选取较小刚度的弹簧;选取较小的光纤束与反光片的初始距离;喷嘴射流的预定流速与被测射流的流速相差不宜过大,vs取vb最大值的2倍较好。
猜你喜欢
航空兵器(2022年4期)2022-10-11
氮肥与合成气(2022年8期)2022-08-05
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
兵器装备工程学报(2021年10期)2021-11-08
科技视界(2021年15期)2021-07-01
中国科技纵横(2020年15期)2020-12-30
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
汽车维修与保养(2020年11期)2020-06-09
