基于协同充电技术的直流充电桩控制方法研究
2021-02-24 06:25
浙江电力 2021年1期
(国网浙江省电力有限公司杭州供电公司,杭州 310009)
0 引言
近年来,国家提出要大力发展节能和新能源汽车,并先后出台多项措施鼓励新能源汽车及其产业的发展[1-2]。随着我国电动汽车销售量的逐年剧增,直流充电桩和快充技术发展迅猛。直流充电逐步取代交流充电等其他充电方式将会是一种必然的趋势,但依然无法彻底解决充电难题。目前,一方面充电桩数量缺口巨大,另一方面现有充电设施利用率低、闲置率高、充电模式不合理造成大量电池的寿命缩短。对现有的直流充电桩控制策略进行改进和完善,使直流充电桩与用户和电池信息共享、协同控制充电,是推动电动汽车产业发展的关键之一。目前国内充电桩的设计大多是按照一个充电桩一个充电枪的模式,当一桩一枪的充电系统在面对多台电动汽车时,采用传统充电方式的电动汽车需要较长的充电时间,严重影响用户体验,这样就需要配备多台充电桩,但会增加充电设备投入,占用更多场地和更高的设备维护成本,一桩多充能有效解决同时对多辆电动车充电的难题,也是目前研究的热点之一。电动车充电系统普遍采用均充[3]或轮充方式对电池完成充电作业,或者采用以集中控制与分层控制为核心的控制方式对汽车充电进行优化[4]。但在现有的硬件结构条件下,一部分方法在不增加系统硬件构成复杂度的情况下,不能根据系统实际状态和多样的实时需求,自主柔性配置充电模块完成充电作业,往往会造成充电机系统充电方式不灵活,功率模块总体利用率低下;另一部分方法表面上能够得到比较合理的控制结果,但过于依赖网络通信,在现有的网络带宽下,很难实现。目前现有的电动汽车与车桩之间的信息交流相对较少,导致用户需求、电动汽车电池、车桩三者关系无法实时匹配。总之,充电系统未充分考虑电池的荷电状态与用户需求,导致电动汽车充电效率低下,电动汽车电池的使用寿命缩短。
文献[5]提出了面向多种情景的相关控制策略与车桩充电管理方法,根据在不同时间段内的充电速率,分场景充电方法大致分为:分时租赁的充电模式,旅行充电模式,假日出游充电模式控制策略,保姆车充电模式,自动充电模式控制策略。但这种方法还未应用于实际,往往没有关注到用户的实时充电需求,只能在固定的时间段内设置对应的充电倍率,倍率调节是固定级别的,缺乏灵活性,同时没有实现信息的交互,导致用户可能提前或者延后离开充电桩,进一步影响电池的使用寿命。
文献[6]提出了基于典型充电曲线的控制策略。在电动汽车整个充电过程中,实时采集并且返还汽车的BMS 数据,与汽车的实际充电数据相对比,结合功率模块实现充电参数的实时微调,使得充电电流与电压保持在一个合适的状态,这样既能满足用户的实时需求,又能实现车与车桩之间的动态信息交互。但该方法局限于已有的典型充电曲线,不能根据充电电动汽车的实时加入退出进行全局性充电管理,此外,未充分考虑用户需求。
为了解决上述问题,本文从现有的控制策略出发,完善相关的柔性分配模型与控制策略,导出对应的模糊控制算法,以实现一桩多充系统中车-桩-用户的信息共享和协同充电[7]。本文的主要内容如下:
(1)对现有的直流充电桩控制策略进行改进和完善,使得汽车充电桩与用户和电池之间完成信息对接,最终实现协同控制。在满足用户需求的同时,能够保证整个充电过程对电池进行一定的保护,延长电动汽车的使用寿命。
(2)采用基于规则的模糊控制算法,将处于充电状态的每辆电动车的电池SOC 和每位用户期望充电时间作为控制器的输入,实时调节电动汽车的充电电流大小与充电模式。
1 协同充电的总体设计
本文提出了基于电动汽车-充电桩-用户之间信息共享的电动车模块化协同充电方法,其核心是围绕“人”“车”“桩”三者的交互关系进行充电管理。从“人”的角度就是最大化满足用户充电需求;从“车”的角度就是在满足充电用户需求的情况下延长电动汽车电池的使用寿命,做到“双管齐下”;从“桩”的角度就是在满足前两者的先决条件下,合理分配充电资源,保证整个车桩系统乃至电力系统的稳定持久运行,持续获得较高的经济效益。直流充电桩协同充电的系统关系如图1所示。建立用户-桩-电池-功率模块-充电枪的信息交互体系,实现多源对象的协同运行,才能达到充电系统的性能最优化。
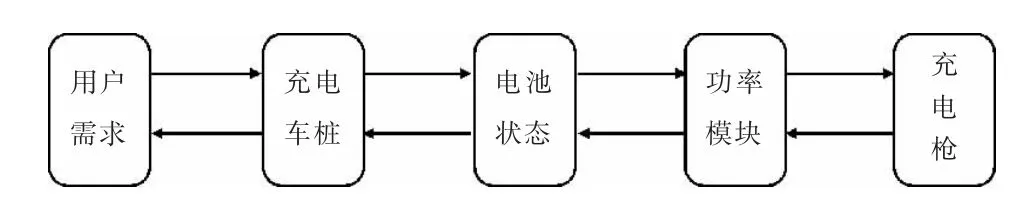
图1 系统总体关系
2 协同充电技术
2.1 影响因素
2.1.1 用户充电需求
从理论上来说,用户对于电动汽车的充电时间应该是固定的,即连接至充电车桩,设定完充电时间,按照规定的时间完成电动汽车充电,用户驾车驶离。但实际上,充电桩对于汽车的充电可能会根据实际情况加以调整,当多辆汽车接入充电桩时,可能由于总的充电功率模块的相关限制,急需充电的用户无法及时完成充电。因此通过相关算法调节满足每辆汽车用户的充电需求也是一个重要环节。
2.1.2 电池的实时荷电状态
电池的SOC 指的是电池的荷电状态,通常用来体现电池的剩余容量。数学意义上将其定义为电池剩余容量与电池总容量之比,一般用百分数表示。取值范围为0%~100%,若SOC=0%则表示电池放电完全,若SOC=100%时则表示电池完全充满。
如图2 所示,电池的实际充电特性大致可以分为三个阶段:“预充阶段”“恒流充电阶段”“恒压充电阶段”。简而言之电池的SOC 数值并不是简单的线性上升或者下降的过程[8],因此得根据电池的实时荷电状态改变充电枪的充电电压和电流大小,并且实时返还电池的SOC 值。充电初始阶段动力电池需求为大电流恒流充电;随着动力电池端电压的不断升高,充电需求电流慢慢减小,直至充电结束阶段进入小电流的恒压充电模式。针对电池的不同充电阶段采用相应的充电策略,动态调整充电电流,在缓解电池极化效应的同时控制电池温升,有助于提高锂电池的充电效率和电池应用寿命。此外,在充电后期,即恒压模式开始之后,充电电流越来越小直至充电完成,当充电电流小到一定的时候,如果计算剩余功率,可能会有空闲模块,将其投入新的充电终端可节省充电时间和充电资源。当充电需求下降到可以减少功率模块的数量就可以满足时,将功率模块切出。

图2 电动汽车电池充电特性
2.1.3 充电桩的实时充电功率
充电桩的实时充电功率还与目标车辆的实时充电状态(汽车电池的SOC)挂钩,主要包括:当电池状态无法满足需求时,实时调节充电功率;当电池的电压无法满足需求时,实时调节充电功率;当电池的电流无法满足需求时,实时调节充电功率;当电池的SOC 值无法满足需求时,实时调节充电功率。实现与用户实时充电需求相同步的设计需求。
2.2 协同充电控制策略
本文提出的协同充电控制策略如图3 所示,通过控制算法形成用户-电池-充电桩的信息交互网络,完成充电系统的优化,主要功能模块如下。
2.2.1 用户需求
由图3 可知,用户根据自身电动汽车的电池情况以及电动汽车预估的停留时间,向直流充电车桩输入自身的需求以及预期充电时间Tep。
2.2.2 数据读取
根据对应的用户需求,直流充电车桩通过电池的BMS 系统读取待充电车辆的实时电池数据,主要包括电池的电压Vbat与电池的实时SOC。用户的预期充电时间Tep与电池的实时SOC 可作为模糊控制的两个输入量。
2.2.3 模糊控制
利用模糊控制,根据一定的算法推演初步得出需要充电汽车的有效充电时间TC 与实时充电速率Ce。
2.2.4 电池SOC 与电压管理
对模糊控制结果的对应参数进行微调,使得电池的实时SOC 数值始终保持在[SOClow,SOChigh]范围之内[9],同理使得电池的实时电压始终保持在[Vbat_min,Vbat_max]范围之内,从而延长电池的使用寿命。同时根据用户的实时充电需求和电池的实时SOC 值调整直流充电桩的充电功率。一旦SOC到达临界边界值(SOClow,SOChigh),汽车电池的电压达到欠压/过压标定阈值(Vbat_min,Vbat_max)时,触发器启动,模糊控制器重新计算对应的Ce,TC数值,从而做到实时更新充电功率。
电压控制主要通过两步实现,如图4 所示。

图3 电动汽车的协同充电控制策略
(1)SOC 调节其对应的控制器得到对应的实时功率变化率dPbat_SOC,满足关系式:

其中,δSOC由电池的SOC 阈值(即SOClow,SOChigh)确定,同时满足如下关系式:
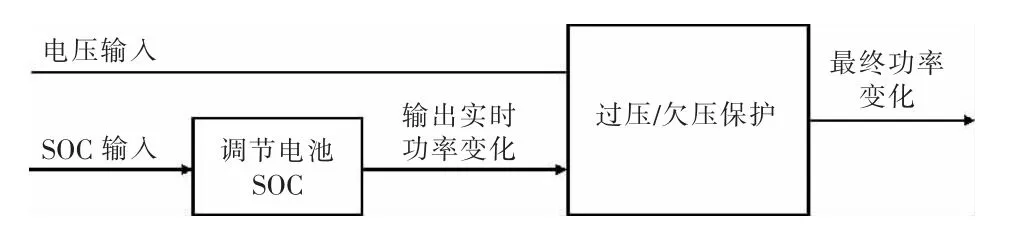
图4 电压控制

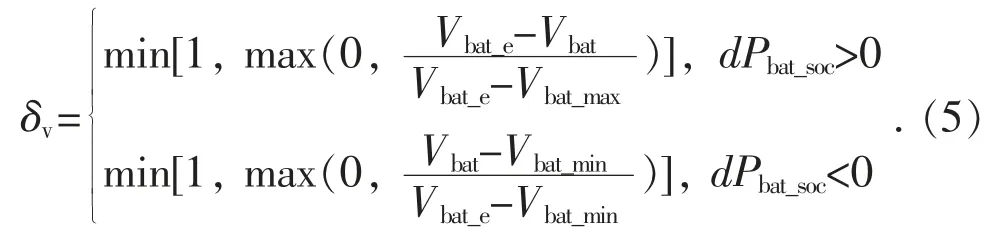
(2)根据前向通道的实时数据,实时调节电池的欠压以及过压保护控制器的功率变化率,其变化条件满足如下关系式:

其中,δv由电池的SOC 阈值SOClow和SOChigh,及电池所标定的额定输出电压Vbat_e决定:
2.2.5 数据调整
再次利用从BMS 读取的电池电压Vbat与电池实时SOC,将其作为电压管理和电池实时SOC的两个控制输入变量,通过对应模块,计算得出在电池允许的电压以及SOC 阀值范围内所需要的输出功率的实时变化量dPbat,再将其输入到下一模块,在充电速率转换器的协助下,得出实时的充电速率变化率dCe,进行参数微调,与之前的通过模糊控制所得到的充电速率Ce相加,从而得到电动汽车最终需要的实时充电速率Ce_Final。
整个充电过程的流程如图5 所示,主要包含:实时获取待充电车辆的电池状态;实时判断电池状态是否满足先决条件;根据车辆状态实时改变充电速率与充电时间;通过微调充电参数来实时确定直流充电桩的充电功率。
直流充电车桩的模块主要由4 个单元组成:
(1)数据请求单元:从用户根据自身的充电需求出发,确定充电车辆的型号以及预估所需要的充电时间。
(2)数据采集单元:主要用于获取目标充电车辆的实时SOC 值以及车辆的电池状态。
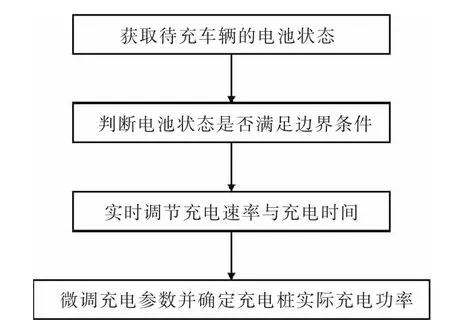
图5 直流充电桩的协同充电控制策略
(3)信息加工单元:主要结合了模糊控制算法,实时计算并且确定待充电车辆的充电时间以及充电速率和电池的SOC 值,做到理论意义上的协同控制。
(4)智能控制单元:将上述三个单元数据综合计算分析,基于模糊算法最终确定待充汽车的有效充电时间与有效充电速率,从而保证在最短的时间内完成快速充电,满足用户的实时需求,并且对电池起到一定的保护作用,从而延长电池的使用寿命,在一定程度上增大了电动汽车的行驶里程,保证了用户和充电桩的经济效益最大化。
3 算例分析
3.1 模糊控制器的设计
由于模糊控制具有鲁棒性强、简单、便于应用的特点[10-11],本文提出的基于模糊控制算法的充电协同控制不需要建立被控对象的精确数学模型,使得控制机理和策略便于接受与理解,适用于多台电动车同时充电时直流充电桩的能量管理系统。
本文基于MATLAB 的模糊控制逻辑工具箱对多台电动车直流充电桩协同充电技术进行算例分析,模糊控制模型采用双输入双输出模式,其中两个输入分别为电池实时SOC 与用户预期停留时间Tep,两个输出分别为电池实际充电时间Tp与充电桩的实时充电速率Ce,考虑到仿真的直观性与明确性,本文选取三角形函数作为最终的隶属函数[12]。
对于输入量电池SOC,设计三个模糊集,分别为“小”“中”“大”[13]。其中,“小”的对应横坐标为[0 0.15 0.3];“中”的对应横坐标为[0.2 0.5 0.8];“大”的对应横坐标为[0.7 0.85 1.0]。将另一个输入量用户的预期停留时间分为三个模糊集,分别为“短”“中”“长”。其中,“短”的对应横坐标为[0 1.5 3.0];“中”的对应横坐标为[2.0 4.0 6.0];“长”的对应横坐标为[5.0 6.5 8.0]。
对于输出量,将充电桩实际充电时间分为五个模糊集,分别为“短”“中短”“中”“中长”“长”。以小时为单位,“短”的对应横坐标为[0 1.0 2.0];“中短”的对应横坐标为[1.5 2.5 3.5];“中”的对应横坐标为[3.0 4.0 5.0];“中长”的对应横坐标为[4.5 5.5 6.5];“长”的对应横坐标为[6.0 7.0 8.0]。将充电桩实时充电速率分为五个模糊集,分别为“低”“中低”“中”“中高”“高”。其中,“低”的对应横坐标为[0 0.125 0.25];“中低”的对应横坐标为[0.2 0.325 0.45];“中”的对应横坐标为[0.4 0.525 0.65];“中高”的对应横坐标为[0.6 0.725 0.85];“高”的对应横坐标为[0.75 0.875 1.0]。
本文采用经验归纳法,建立模糊规则,设计标准为:电池SOC 越低,用户停留时间越短,实际充电速率越高,实际充电速率越短。以此为核心进行归纳推理,得出基于实际的9 条控制规则:
(1)如果电池SOC 大,用户期待停留时间长,则实际充电时间长,实际充电速率低。
(2)如果电池SOC 大,用户期待停留时间中,则实际充电时间中,实际充电速率中低。
(3)如果电池SOC 大,用户期待停留时间短,则实际充电时间短,实际充电速率中。
(4)如果电池SOC 中,用户期待停留时间长,则实际充电时间中长,实际充电速率中。
(5)如果电池SOC 中,用户期待停留时间中,则实际充电时间中,实际充电速率中高。
(6)如果电池SOC 中,用户期待停留时间短,则实际充电时间短,实际充电速率中高。
(7)如果电池SOC 小,用户期待停留时间长,则实际充电时间长,实际充电速率中。
(8)如果电池SOC 小,用户期待停留时间中,则实际充电时间中短,实际充电速率中。
(9)如果电池SOC 小,用户期待停留时间短,则实际充电时间短,实际充电速率高。
3.2 模拟仿真结果
为了验证基于模糊算法的协同充电控制策略有效性,本文从理论层面进行分析,假定接入充电桩的均为同一款汽车,电池容量保持一致。暂定所有目标用户的需求都是将汽车充满电(SOC值均为1)。从目前的研究情况得知绝大部分用户只有当电池的SOC 低于50%(即SOC<0.5)才会对电动汽车进行充电操作,本文选取了5 组不同电动车的双输入数据进行了如下场景的仿真:
共有5 辆电动车同时充电,接入充电桩时的电池SOC 分别为0.1,0.2,0.3,0.4 和0.5,用户预期的充电时间分别为5,2,2,2.5 和8 h。仿真结果如图6 和7 所示,分别表示电池实时SOC与用户预期停留时间Tep在规定范围内的电池实际充电时间Tp与充电桩的实时充电速率Ce最终结果。

图6 双输入单输出电池实际充电时间Tp 的仿真结果

图7 双输入单输出充电桩实时充电速率Ce 的仿真结果
根据仿真结果,综合电池电压控制的微调控制单元,可得模糊算法优化后的实际充电时间。
传统的“轮流充电”和“均流充电”场景设定为:一个充电桩(或充电堆)配备多个充电枪,电动车按照先后次序轮流占用充电枪,一旦有电动车接入充电枪,整个充电桩(或充电堆)会将剩余电量平均分配给每个有车充电枪。
将每辆电动汽车的电池容量统一规定为60 Ah,单个功率模块的最大功率为12 kW,结合理论计算公式,分别计算出不同车辆的按照传统“轮流充电”以及“均流充电”的方法所需要的实际充电时间:

其中,N 表示功率模块的个数。
采用传统模式和模糊算法优化控制的充电数据结果如表1 所示,两种充电方式下的实际充电时间对比如图8 所示。

表1 传统充电模式和模糊算法优化充电数据结果

图8 传统充电模式与模糊算法协同控制实际充电时间对比
由图8 可知,引入模糊控制算法后的充电模式相较于传统“轮充”以及“均充”的方法,每一辆车的实际充电时间都有一定量的缩短,所以借助模糊控制这一工具,能够更好地实现电动汽车的快速充电,并且更大化地满足用户需求,实现充电功率的合理分配与电力资源的有效运用。
4 结语
本文提出的基于模糊控制算法的直流充电桩协同充电方法,根据用户目标充电时间以及电池荷电状态和电池电压确定有效的充电时间和充电速率。通过与充电桩的信息共享,获得每辆电动车BMS 发出的充电需求,对直流充电桩现存的能量进行实时合理分配,解决了现有充电桩技术不能根据电池状态和实时需求,自主柔性配置充电模块的问题。此外,能够保证充电过程中对电池的保护,提高电池寿命,减少环境污染,带来巨大的经济效益。
猜你喜欢
初中生学习指导·中考版(2022年3期)2022-03-25
初中生学习指导·提升版(2021年7期)2021-08-24
汽车维修与保养(2021年8期)2021-02-16
新课程·上旬(2020年36期)2020-12-29
中学生数理化·七年级数学人教版(2020年4期)2020-08-10
动漫星空(兴趣百科)(2019年3期)2019-03-07
海外星云(2016年17期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22