SDMSA双磁致伸缩线性位移传感器标定实验研究
2021-02-23 11:52:00宋懋征刘晓敏
吉林化工学院学报 2021年1期
宋懋征,刘晓敏
(北华大学 机械工程学院,吉林 吉林 132021)
磁致伸缩位移传感器是利用磁致伸缩原理研发出的高精度位移传感器,在使用中采用非接触的测量方法.在日常实际生产中具有使用寿命长,环境适应能力性强的特点;在测量精度方面具有高精度、高稳定性、高可靠性和高重复性的技术特点.该位移传感器安装简单且方便,广泛运用于高温高压、易燃易爆的场所,并在冶金工业、港口设备、建筑行业和水利等高要求的工业场合,是高精度位移控制的首选[1-3].
随着电子科技的发展,位移传感器在石油、化工、机械、水利等行业得到广泛的应用.近年来有较多的学者对位移传感器理论、数学模型及实验等方面做了诸多的讲究工作[4-5].河北工业大学张露予等人采用在不同螺旋磁场作用下探究磁致伸缩位移传感器螺旋磁场与输出电压的关系[6].国网电力科学研究院提出了通过改进位移传感器的结构优化设计来提高位移传感器的测量精度,在硬件电路设计及其实现方法上进行了一系列的改进,实现了高压充电、时间测量及滤波的功能[7].
河北工业大学结合磁致伸缩位移传感器的原理,从双磁环产生的偏置磁场与双磁环间距的关系出发,对传感器在测量误区内的信号进行了综合分析,并通过实验进行了实践检测[8].上海理工大学李庆山基于FPGA器件设计了数字移相脉冲计数方式对时间的准确测量,建立了数字相移时间的数学模型[9].
1 实验结构与原理
1.1 磁致伸缩线性位移传感器结构
磁致伸缩线性位移传感器的外形结构及尺寸如图1所示,该传感器主要由头部传感器、硬件电路系统、探测杆、闭口活动磁环等组成,其中硬件电路系统和检测线圈位于传感器头部.

图1 磁致伸缩位移传感器外形及外形结构尺寸
1.2 磁致伸缩线性位移传感器工作原理
双磁致伸缩位移传感器结构示意图如图2所示,主要由驱动电路、波导丝、闭口磁环、检测装置和阻尼装置等装置组成.

图2 双磁环磁致伸缩位移传感器结构示意图
磁致伸缩位移传感器,是利用磁致伸缩原理并通过测杆产生的激励磁场与闭口磁环产生的偏置磁场相交产生一个应变脉冲信号的变化来准确测量位置量的.由于磁致伸缩的原理,随后波导管内会产生一个相应的应变机械脉冲信号,通过传感器头部的芯片计算,将脉冲产生的方波转换为电压、电流以及ModBus/SSI等多种输出方式.
当位移传感器正式工作时,脉冲驱动电路产生脉冲信号,随电路进入检测线圈、闭口磁环处,脉冲电流瞬间产生周向磁场与闭口磁环产生的轴向磁场相叠加,形成了螺旋磁场.根据魏德曼效应,两磁场叠加处会使波导丝产生扭转形变,两个闭口磁环同时工作形成两个扭转应力波并以速度v分别向磁环两端传播,当检测线圈检测到扭转波信号,线圈两端会产生电压信号,通过收集两闭口磁环传输间的t1、t2,脉冲发出时间与两个扭转波被检测到的时间之间的时间差,环形永磁体与检测线圏之间的距离为S,波的传播具有相对独立性,上述产生的扭转波产生后会在传播中相遇,但是不会相互影响,检测线圈可以检测到独立电压信号,完成检测任务.而测杆两端的阻尼装置,可以有效地减少反射波的干扰.实验原理图见图3.
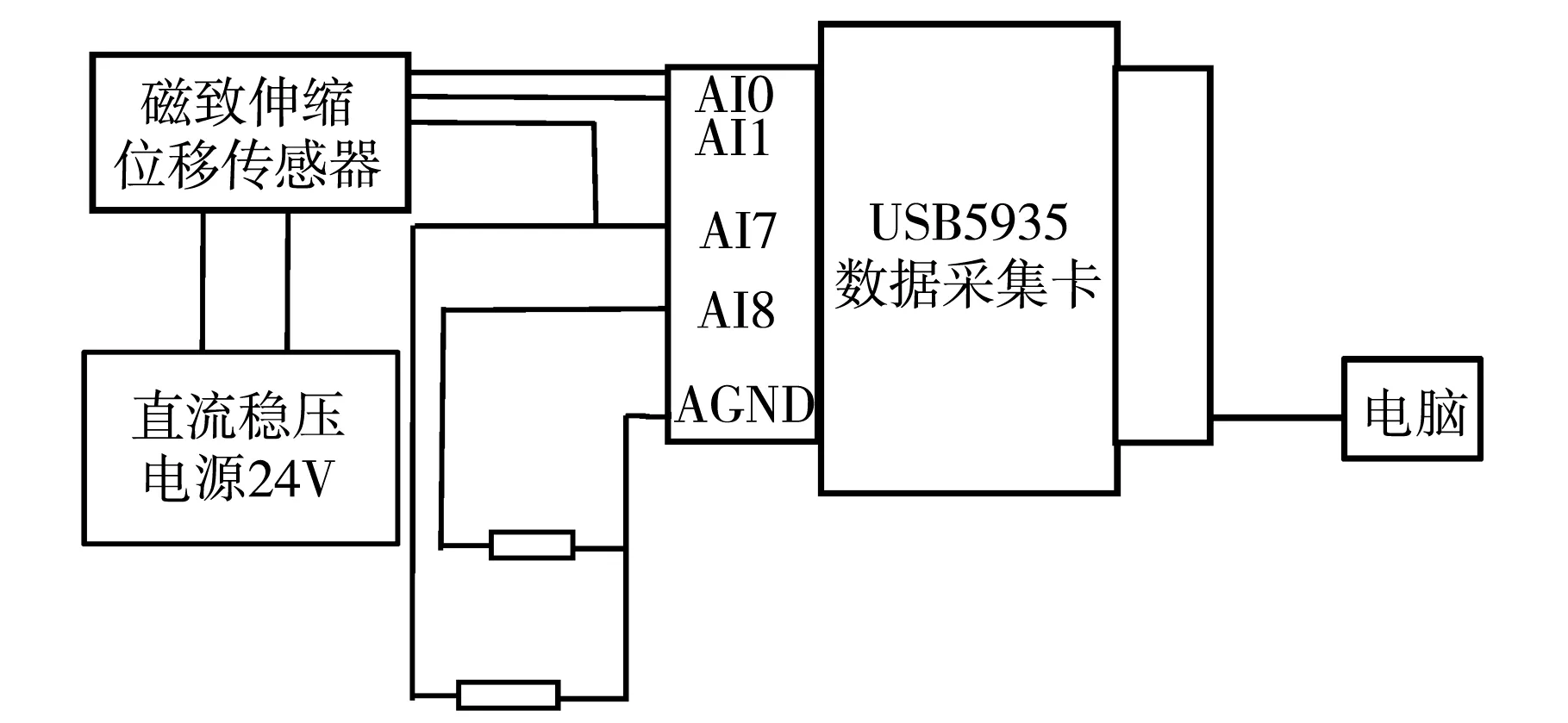
图3 实验原理
双磁环磁致伸缩位移传感器的输出电压与线圈匝数、磁环间距、偏置磁场、激励磁场等因素有关.但当确认了磁致伸缩传感器与磁环的实验参数后,输出的电压主要与两磁环的间距有关.并通过在磁致伸缩位移传感器的测杆上移动两闭口磁环,并对比经数据采集卡反馈出的输出电压,来研究磁致伸缩位移传感器两磁环的位移量与输出电压的特性关系.探究位移量S与电压差值ΔV之间的关系.
两磁环之间的电压差值为:
ΔV=e2-e1.
(1)
2 标定方法
为验证磁致伸缩线性位移传感器SDMSA位置量与电压信号的特性关系,利用不同位移量对应不同电压值的特性.室温条件下,在磁致伸缩位移传感器的测杆上固定某一个磁环,实验中闭口磁环要与测杆无接触,需用到磁环固定环来固定闭口磁环,见图4中(a)所示.均匀移动另一个磁环,由于两磁环不同磁场对波导管产生的圆周磁场的影响,波导管产生两个应变机械波脉冲信号,经过控制模块输出两磁环对应的电压值,经过计算两磁环之间对应的电压值.进而得出SDMSA位移传感器位置量与电压信号的特性关系.
实验测试系统如图4(c)所示,将直径为12 mm,有效长度为1 000 mm的磁致伸缩测杆用测杆支架固定在60×60的非导磁铝制工作台,将闭口磁环套在该位移传感器的测杆上,并在位移传感器首、末端测杆死区用测杆支架固定.实验中使用的电压为直流稳压电源,为后续信号的调理电路提供稳定的工作电压.
实验方法模型如图4(b)所示,固定右端磁环,活动左端磁环.分别测两磁块等间距30 mm、40 mm、50 mm、60 mm、90 mm、100 mm、150 mm对应的电压值,通过USB5935数据采集器反馈到电脑端.

(a)闭口磁环安装

(b)30 mm模型演示

(c)磁致伸缩位移传感器实验平台图4 磁致伸缩位移传感器实验平台与实验方法演示模型
本实验用到的实验器材有SDSMA位移传感器、闭口磁环、USB数据采集卡、电脑、无磁性铝制工作台、测杆支架、色环电阻、导线等.实验器材具体参数见表1、表2.
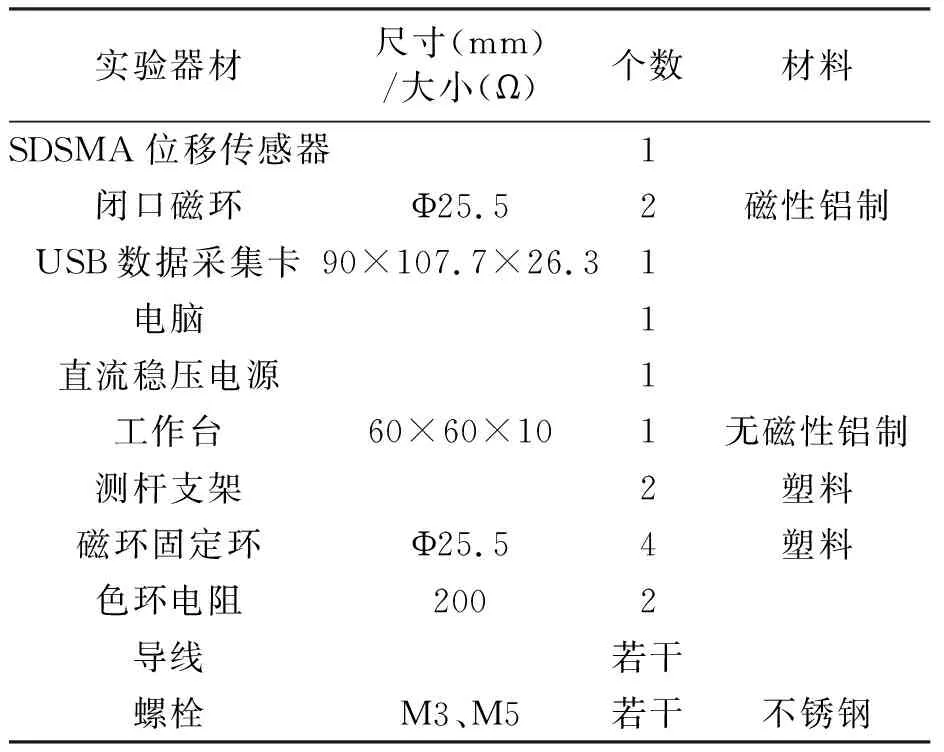
表1 实验设备基本参数

表2 SDSMA位移传感器基本参数
3 实验结果及误差分析
3.1 实验结果分析
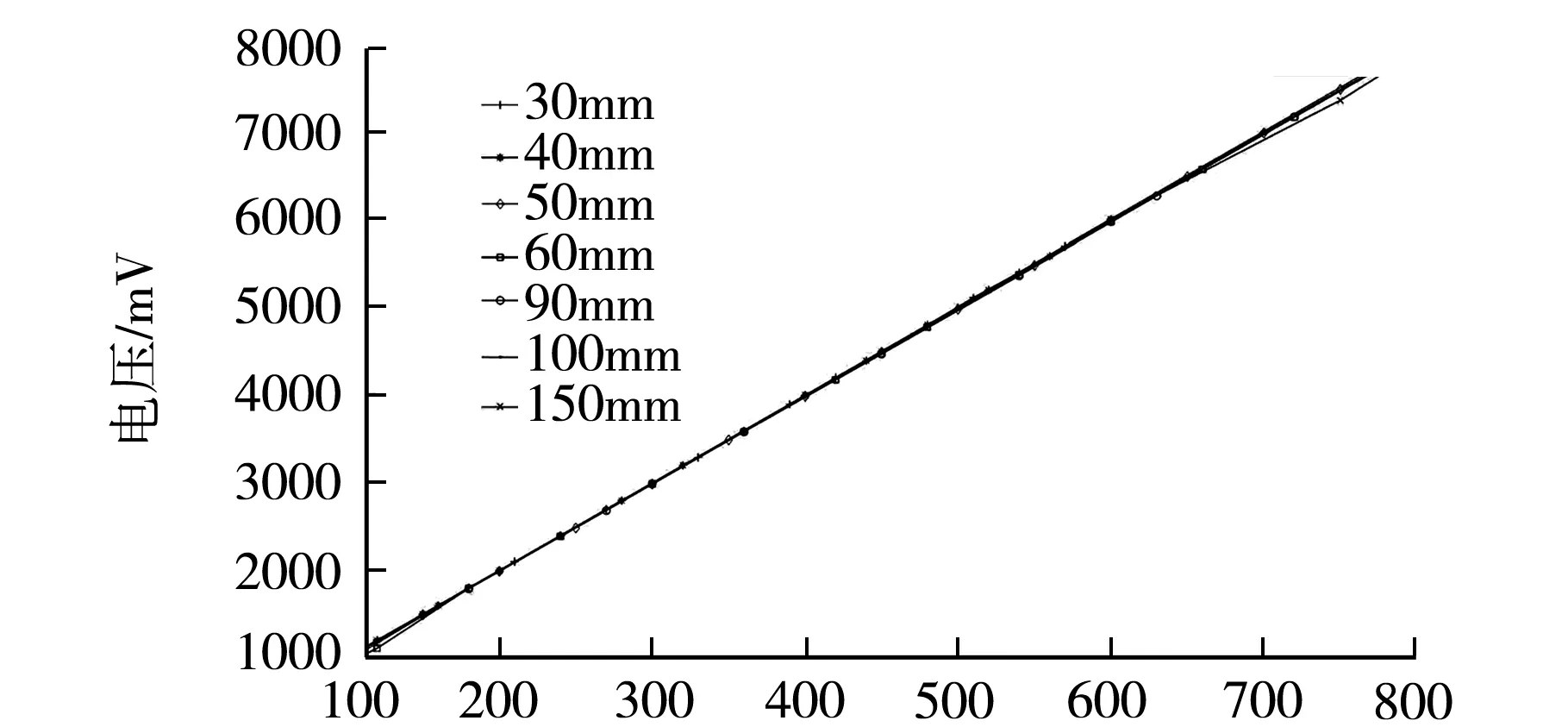
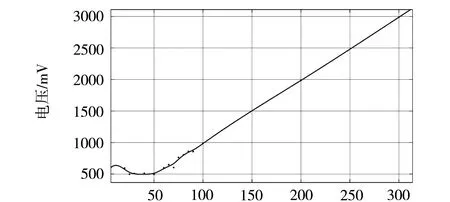
在室温条件下,传感器正常工作,两磁环移动相同位移量并采集记录数据,数据由USB5935数据采集卡读取输出电压,为保证实验数据的可靠性,在显示输出感应电压中采集3组实验数据并取得电压平均值.得出不同位移量的条件下传感器的输出感应电压峰值V的关系,如图5(c)所示.
如图5(b)可见,在100~10 000 mm之间位移量X与输出电压峰值V呈很好的线性关系,得到位移量与输出电压标定方程S为:
S=kΔV±A(Δv≥1000mV),
(2)
其中:k=0.1,S为位移量,Δv为两磁环间电压值差值,A为常数误差.
但在0~100 mm之间曲线的关系,如图5(a),受两磁环自身轴向偏置磁场的相互影响与外部条件的影响,曲线没有明显规律,结果误差较大.

Δ位移/mm(a)实验数据0~100 mm
Δ位移/mm(b)实验数据100~1 000 mm

Δ位移/mm(c)总体实验数据0~1 000 mm及标定曲线S图5 实验数据
3.2 误差分析
对(2)中的误差A进行数据分析,在(2)式中,100 mm≤S≤10 000 mm,在图6中,可见误差值基本稳定在一数值之间.但在0~100 mm之间误差较大,没有任何规律.现对100~1 000 mm之间对误差进行分析,从(b)图可以看出,误差值维持在0%~0.9%之间.
位移量与输出电压标定方程S为:
(3)
Δ位移/mm(a)位移传感器0~1 000 mm总体误差

Δ位移/mm(b)位移传感器100~1 000 mm部分误差图6 双磁环磁致伸缩位移传感器误差分析
其中:S为位移量,Δv为两磁环间电压值差值,A=(0%~0.9%)ΔV.
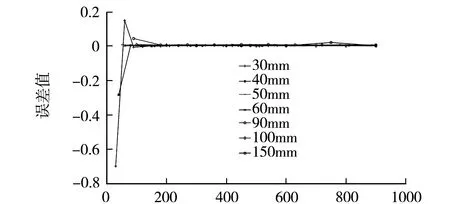
从图7可以看出,在两闭口磁环间距较大时,两磁环间偏置磁场影响较小甚至不相互影响,位移量与输出电压呈线性关系,当磁环间间隙过小,两磁环的偏置磁场相互影响,导致输出电压的不准确性和不稳定性,位移量与输出电压没有确定关系.
Δ位移/mm图7 磁致伸缩位移传感器两磁环测量误区数据
从实验结果可以看出,偏置磁场的变化严重影响输出电压的变化.双磁环磁致伸缩位移传感器测杆上两个磁环,在0~100 mm之间,主要的原因是磁环剩磁的存在,两磁环在一定距离内,磁环的剩余磁场强度与另一个磁环的中心磁场强度叠加形成的新的偏置磁场,会导致输出电压的不稳定变化,从而使传感器失效,形成测量盲区.
在100~1 000 mm之间,实验数据可能受线圈温度、环境温度、测量误差等因素,导致数据有所偏差.
现对误差进行综合分析,当两磁环间距小于25 mm时,两磁环相互排斥且磁致伸缩位移传感器检测不到磁环位置,位移传感器检测失效.所以现针对位移传感器的测量误区进行数据采集,测量结果如图7所示.
从图7中曲线的趋势可以看出,当两磁环间距≥100 mm时,两闭口磁环位移量与传感器的输出电压呈很好的线性关系,但在0-1 000 mm之间,两磁环的偏置磁场相互影响,两磁环相互排斥,曲线呈不规律曲线.所以在使用该型号的磁致伸缩位移传感器时,应尽量避开0~1 000 mm的测量误区,避免实验数据的不真实和不可靠性.
综上数据分析,通过实验数据推出传感器位移量与输出电压标定方程S能很好地满足实验数据,并通过误差的计算与分析,得出较为准确地误差值.试验结果表明,在测量误区外,传感器位移量与输出电压的线性关系较好.
4 结 论
本文中建立了磁致伸缩位移传感器双磁环间距与输出电压的关系特性模型,控制其线圈匝数、偏置磁场、激励磁场相同的条件下,改变两磁环的间距,得到位移量与输出电压的拟合曲线,推出的标定方程可以准确的描述该传感器在不同位移下的输出电压关系特性;其后又进一步对双磁环的测量误区进行了数据收集,结果表明,在0~100 mm之间,双磁环由于自身产生的偏置磁场相互影响,对实验数据的影响较大,而在100~1 000 mm之间,位移量与输出电压呈线性相关.本文采用的实验方法与采集的数据,为以后磁致伸缩位移传感器的使用提供了宝贵的经验.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:32
电力自动化设备(2022年6期)2022-06-15 07:19:30
中国信息化(2022年5期)2022-06-13 11:12:49
防爆电机(2022年1期)2022-02-16 01:14:00
青海电力(2021年2期)2021-07-21 03:18:32
商品与质量(2021年29期)2021-07-19 12:52:20
VOGUE服饰与美容(2018年11期)2018-05-14 17:25:32
电机与控制应用(2017年5期)2017-06-05 14:19:11
现代应用物理(2016年4期)2017-01-19 09:22:46
北京航空航天大学学报(2016年6期)2016-11-16 01:50:49