黏滞阻尼器高频响应下的自适应时滞补偿设计
2021-02-22 02:39:56王涛,郑欢,王贞
黑龙江科技大学学报 2021年1期
王 涛,郑 欢,王 贞
(1.黑龙江科技大学 建筑工程学院, 哈尔滨 150022; 2.武汉理工大学 土木与建筑学院, 武汉 430070)
0 引 言
为了检验速度相关型工程结构的抗震性能及动力响应,Nakashima等[1]于1992年提出了实时混合实验方法。该方法选取整体结构中的关键部位作为物理子结构,剩余部分作为数值子结构,建立二者边界条件并实现实时通信,输入外部激励后,即可反映整体结构在地震作用下的实时响应,具有良好的经济性和实验精度。实时混合实验在实验过程中要保证计算与加载的实时性,然而计算实时性由于受到数值子结构的复杂程度影响,往往难以保证而产生时间滞后,即时滞[2]。为解决时滞问题,国内外学者提出了众多时滞补偿方法,通常的时滞补偿方法有基于定时滞假定的位移预测方法[3-4]和基于变时滞假定的时滞补偿方法[5-6],其中王贞等[7-8]提出了基于参数识别的自适应时滞补偿方法,并对磁流变阻尼器开展了基于该时滞补偿方法下的实时混合实验,结果表明该方法能有效补偿时滞,然而该实验中磁流变阻尼器位移响应频率较低,这可能会弱化时滞对结构响应的影响,因此,针对高频响应下阻尼试件的实时混合实验,自适应时滞补偿方法的时滞补偿效果尚需进一步验证。
笔者针对高速列车车厢开展实时混合实验,其中物理子结构为高速列车车厢一节黏滞阻尼器,剩余部分为数值子结构,分别开展了无时滞补偿的实时混合实验(Real-time hybrid test,RTHT)和基于常速度假定时滞补偿(Constant velocity delay compensation,CVDC)方法和基于模型更新的自适应时滞补偿(Adaptive time delay compensation,ADC)方法的实时混合实验,以验证ADC方法针对黏滞阻尼器在高频响应下的时滞补偿效果。
1 自适应时滞补偿方法原理
在实时混合实验当中,通过求解运动方程,能够得到物理子结构的期望位移De,然而由于存在时滞,在物理子结构加载后得到的实测位移Dm与De可能存在较大偏差,通过进行时滞补偿,能够得到补偿后命令位移Dc,对Dc进行加载后,可减小Dm与De之间的偏差,从而实现时滞补偿。
ADC方法建立伺服加载系统和试件的整体模型,通过设置离散系统模型参数,建立当前步命令位移与历史命令位移、实测位移的关系式,然后利用加窗的最小二乘法对假定的参数进行估计,最后通过假定当前步期望位移与实测位移相等,上步参数取值与本步参数取值相等,即可求解当前步的命令位移,从而达到时滞补偿的效果,该方法原理如图1所示。

图1 自适应时滞补偿混合实验原理Fig. 1 Principle of RTHT with adaptive delay compensation
1.1 离散系统模型
建立伺服加载系统和试件的离散模型,假定作动器命令位移与历史命令位移、实测位移有如下关系:
(1)
式中:Dc、Dm——物理子结构命令位移与实测位移向量;
θc、θm——对应于命令位移与实测位移离散模型参数向量;
p、q——对应于命令位移与实测位移离散模型参数的个数;
i——积分步。
由式(1)可知,通过对加载系统和试件进行离散,可以建立当前步命令位移与前几步命令位移和实测位移之间的数学关系式,若能对假定参数进行参数识别,再将相关位移代入式(1)中,即可实现对当前步命令位移的求解,从而实现时滞的补偿。
1.2 多项式参数识别
对模型进行离散后,若想求解当前步的命令位移,需要对模型参数进行识别。由于在实时混合实验当中,积分步往往较小而数据量较大,因此,采用带遗忘因子的最小二乘法对参数进行识别[9],对于初始误差较大的参数进行时滞补偿效果较差,因此选用加窗的最小二乘法进行参数识别。该算法利用Dc、Dm的历史数据,即可对当前步参数的取值进行估计。
将式(1)改写成矩阵形式


根据最小二乘法可知
式中,Φi——第i步命令位移与实测位移矩阵,Φi=[φiφi-1…φi-L+1];

L——所用数据的组数。

通过上述计算,即可对式(1)中参数进行识别。
1.3 时滞补偿
在经过参数识别的过程得到了离散系统模型参数取值后,只需将式(1)中位移赋值,即可计算当前步命令位移。在完成参数识别后,在第ti+1时刻有
(2)
在相邻积分步中,模型参数在第ti~ti+1内变化不大,因此,可以用上一步估计的模型参数近似当前步
式中,De——期望位移。
同时,每一步都采用期望位移代替实测位移能够提高该方法的鲁棒性,因此上式转化为
(3)
2 实时混合实验
2.1 工程概况
为对ADC方法进行实验验证,拟开展整体结构为高速列车车厢,物理子结构为黏滞阻尼器实时混合实验,实时混合实验原理如图2所示。实验采用的MTS-dSpace实时混合实验加载系统,该系统由进行加载控制和监测数据变化的主机、dSpace1103板卡、MTS液压伺服作动器和物理子结构黏滞阻尼器组成。笔者所用的作动器型号为MTS244.22作动器,最大出力100 kN,活塞动力最大行程为254 mm。车厢剩余部分为数值子结构,建立精细化有限元模型,通过输入轨道不平顺作为外部激励,轨道不平顺如图3所示。

图2 黏滞阻尼器实时混合实验原理Fig 2 Principle of real-time hybrid test of viscous damper
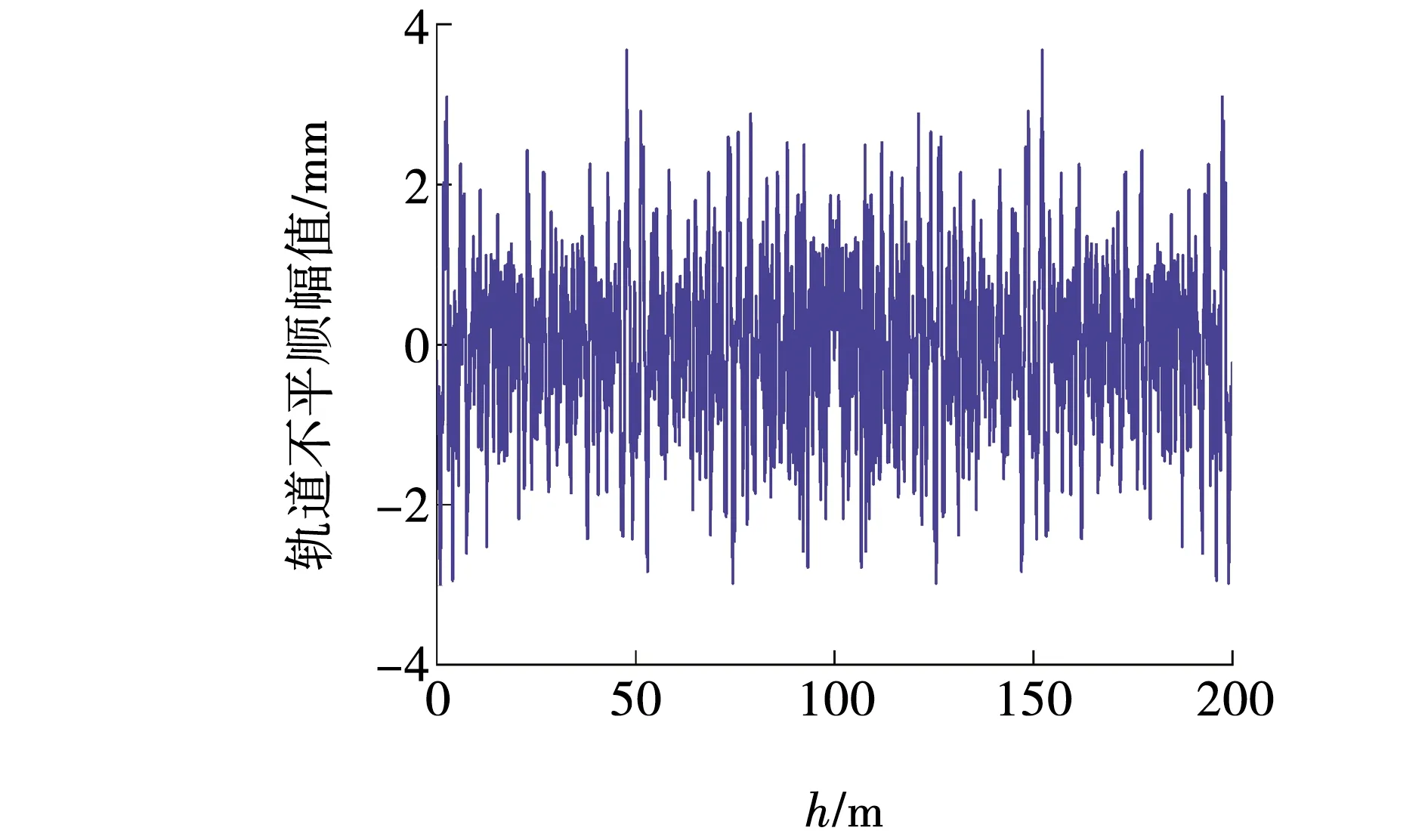
图3 轨道不平顺Fig. 3 Track irregularity
2.2 工况设计
为验证所提方法的有效性,分别开展无时滞补偿实时混合实验(RTHT)和基于CVDC方法和ADC方法的实时混合实验
(4)
式中:Δt——假定时滞;
ve——期望速度。
在实验过程中,利用式(4)计算命令位移,即可对时滞进行补偿。
为对时滞补偿效果进行量化,分别定义三种评价指标:J1为系统跟踪时滞,ms,该指标能够量化系统时滞;J2为期望位移与实测位移的误差归一化均方根,该指标能够反映位移全时程的误差大小;J3为期望位移与实测位移的峰值误差归一化,该指标能反映局部误差峰值大小。
式中:k——时滞最大点对应积分步;
N——积分总步数。
2.3 实验结果分析
通过调整数值子结构参数,设定高速列车行驶速350 km/h,根据前期实验结果,定义常速度假定时滞补偿实时混合实验中Δt=16 ms,同时根据实验前期调试,最终选择三参数ADC方法,即:

三种工况抗蛇行减振器位移时程如图4~6所示。

图4 不进行时滞补偿位移时程Fig. 4 Displacement time history without delay compensation

图5 常速度假定时滞补偿位移时程Fig. 5 Displacement time history with constant velocity delay compensation

图6 自适应时滞补偿位移时程Fig. 6 Displacement time history with adaptive delay compensation
图4为RTHT黏滞阻尼器位移响应,取较为稳定的20 s位移时程,位移幅值约为1.5 mm,频率约9 Hz。图4b为1 s位移时程,RTHT物理子结构的期望位移与命令位移相同,但与实测位移存在较为明显差别,该差别主要是由于数值子结构的计算时效所导致,相位上存在16 ms的时间差距。图5为CVDC方法得到的物理子结构响应,在该方法下,位移幅值为0.6 mm,频率约7 Hz。由于采用时滞补偿,由图5b可以看出,命令位移先于期望位移和实测位移,可见采用CVDC方法时滞得到了一定程度上的补偿。从相位上来看,补偿已经基本满足要求,位移幅值上尚需进一步补偿。图6为ADC方法得到的物理子结构响应,位移反应幅值为0.6 mm,频率约6 Hz。由图6b可以看出,基于ADC方法的实时混合实验中,位移反应相位与幅值几乎完全得到补偿。对比三种工况位移时程可以看出,时滞在一定程度上会放大位移时程的幅值和频率信号,这将影响高速列车行驶的安全性和舒适性。
根据实验结果分析可知,三种工况下J1分别为15.6、2.9和1.0 ms,可见RTHT会产生较大的系统时滞,在进行时滞补偿后,时滞有明显下降,这表明文中两种时滞补偿方法都取得了较为显著的补偿效果,与RTHT相比,采用CVDC方法的实时混合实验中误差指标J1降低了81.4%,而采用ADC方法的实时混合实验中误差指标J1降低了93.4%;与CVDC方法相比,ADC方法J1降低了65.52%。
图7为J2、J3对比结果,三种工况下J2分别为80.74%、19.42%、9.04%,J3分别为62.65%、20.22%、11.78%。

图7 误差指标Fig. 7 Error indicator
由图7可见,RTHT的误差指标J2、J3远高于基于CVDC方法和基于ADC方法的实时混合实验情况。采用时滞补偿后,J2、J3有较为明显的下降,期望位移与实测位移更加接近。与RTHT相比,采用CVDC方法的实时混合实验中误差指标J2、J3分别降低了75.95%和67.73%,而采用ADC方法的实时混合实验中误差指标J1降低了88.80%和81.20%;与CVDC方法相比,ADC方法J2、J3分别降低了53.45%和41.74%,该方法具有更好时滞补偿效果。因此采用ADC方法可以显著降低混合实验时滞影响,提高实时混合实验精度。
3 结 论
(1)当黏滞阻尼器的振动频率较高时,时滞会进一步放大黏滞阻尼器的位移和频率,而常速度假定的时滞补偿方法和自适应时滞补偿方法能有效补偿时滞,降低时滞对位移和频率信号的放大效应。
(2)与基于常速度假定的时滞补偿方法相比,自适应时滞补偿方法的计算时滞误差、归一化位移均方根误差和归一化位移峰值误差分别降低了65.52%、53.45%和41.74%,该方法具有更好时滞补偿效果。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:33:54
科技信息·学术版(2021年18期)2021-10-25 08:16:16
数学物理学报(2020年5期)2020-11-26 06:06:48
工业安全与环保(2020年10期)2020-11-05 05:51:04
四川建筑(2018年4期)2018-09-14 00:16:52
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08 12:15:26
小型内燃机与车辆技术(2015年4期)2015-10-22 07:10:03
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:40
噪声与振动控制(2015年4期)2015-01-01 07:08:24
应用数学与计算数学学报(2014年3期)2014-09-26 12:03:52