基于GIS的短时交通客流智能协调控制系统设计
2021-02-22 10:46:54王伟,李琰
计算机测量与控制 2021年1期
王 伟,李 琰
(1.交通运输部天津水运工程科学研究院,天津 300000;2.石家庄铁道大学 土木工程学院,石家庄 050043)
0 引言
先进的交通网络系统是一个城市发展程度的重要标志之一,随着经济实力与网络技术的迅速发展,人们对于交通规律有了一定的了解,交通客流智能协调控制系统也得到了较大程度的重视[1]。交通客流智能协调控制系统能够辅助交通客流监测装备对路面状况进行实时勘察,稳定现场交通秩序,避免大型事故的发生,对于人类出行安全具有较高的保障[2]。
由于短时交通客流智能协调控制系统对于设计过程中的系统调配要求较高,为此,需加大对交通客流状况数据的收集与分析力度,相关学者对此做出了研究。文献[3]提出基于多智能体的短时交通客流智能协调控制系统设计。引用可变情报板优化交通资源利用效率,通过多智能体仿真模型设计控制系统。该方法具有一定的有效性,但具有较多的系统操作步骤,其准确度的掌握较少,导致其系统操作时长较长。文献[4]提出基于遗传算法的短时交通客流智能协调控制系统设计,利用遗传算法获取小波神经网络阈值,构建交通客流智能协调控制系统。该方法优化了内部系统操作,缩短了操作所需时长,但对于内部数据的处理方式与系统需求吻合度较低,操作中容易遗漏较为关键的操作点,导致其协调控制有效率较低。
针对上述方法问题,提出基于GIS的短时交通客流智能协调控制系统设计。硬件设计中将硬件元件划分为三个模块实行系统操作,较为完美的处理了硬件系统内部结构间的关系,有利于提升系统硬件的设计完整度[5]。在系统软件设计过程中,根据GIS显示数据对交通流状况进行信息采集与分析,完整再现交通网状态,便于提升系统的协调性能,缩减操作时间,提高系统设计效率,获取了较佳的协调控制结果[6]。
1 基于GIS的短时交通客流智能协调控制系统硬件设计
为提升系统操作的有效性,本文分析系统硬件元件内部结构,设置三个硬件模块进行处理,并构建系统硬件设计结构如图1所示。
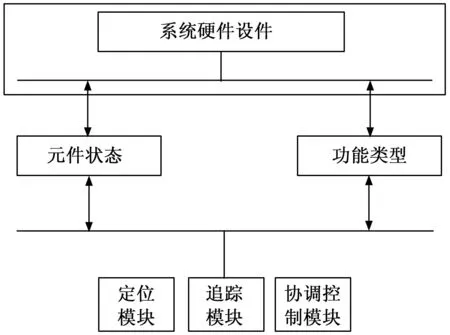
图1 系统硬件设计结构图
1.1 定位模块
GIS作为较为关键的数据查询与分析系统,需不断升级其系统功能,本文首先转化GIS内部系统功能,查询其定位系统状态,并结合SKYLABGPS模块定位交通客流量数据[7]。设置数据定位模块图如图2所示。
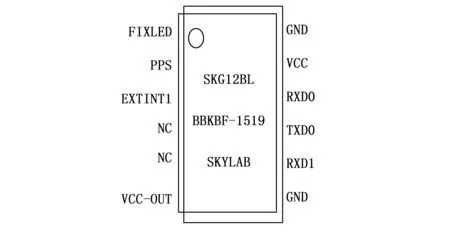
图2 数据定位模块图
SKYLABGPS模块是一款完整的GPS模块,具有高灵敏度、低功耗、小型化的优点,其极高追踪灵敏度大大扩大了定位的覆盖面,在普通GPS接收模块不能定位的地方能够实现完美定位操作。具有高灵敏度、小静态漂移、低功耗及体积轻巧的特点,符合实验研究操作需求,便利实验操作,缩减操作所需时间,集成了RF射频芯片、基带芯片和核心CPU,辅助相关外围电路,组成一个较为完整的集成电路[8]。
内部处理器包含 2 MB 内存,1个 MPI/DP12MBit/s接口,2个DP-Master/Sle 接口,3个以太网PROFINET接口,具备双端换机,根据本文客流量信息,选取其单模块形式执行系统命令,不断追踪数据信息,达到对短时交通客流定位的目的[9]。
1.2 数据追踪模块
由于短时交通客流智能协调控制操作的特殊性,需追踪其车流状况信息,以保证操作具有完整的数据支撑,利用GIS内部管理模式系统固定车流信息,并辅助L76-L GNSS模块实现数据追踪[10]。设置数据追踪图如图3所示。

图3 数据追踪图
在图3中,L76-L GNSS模块具有33个跟踪通道,99个采集通道和210个PRN通道,可完成实况追踪,采用紧凑且统一的外形设计,与Quectel L76模块兼容,提供内置LNA,可在弱信号区域提供更好的性能,便利系统操作[11]。启用多个GNSS系统通常会增加可见卫星的数量,缩短首次追踪的时间并提高追踪数据精度,结合了先进的AGPS,可实现最高性能并完全符合工业操作标准[12]。
允许自身系统使用存储在内部闪存中的星历数据自动计算和预测轨道,因此该模块即使在室内信号电平也可以快速固定位置,且功耗低,可以自适应地调整开/关时间,以根据环境和运动条件实现定位精度和功耗之间的平衡,完善系统操作,达到对短时交通客流智能追踪的目的,完成追踪模块设计[13]。
1.3 协调控制模块
为强化本文系统协调控制力度,一定程度上改造GIS检测的数据,分析数据存储的状态及现时原因,调节操作基础,匹配协调控制器完成数据分析,并设置数据协调控制过程如图4所示。
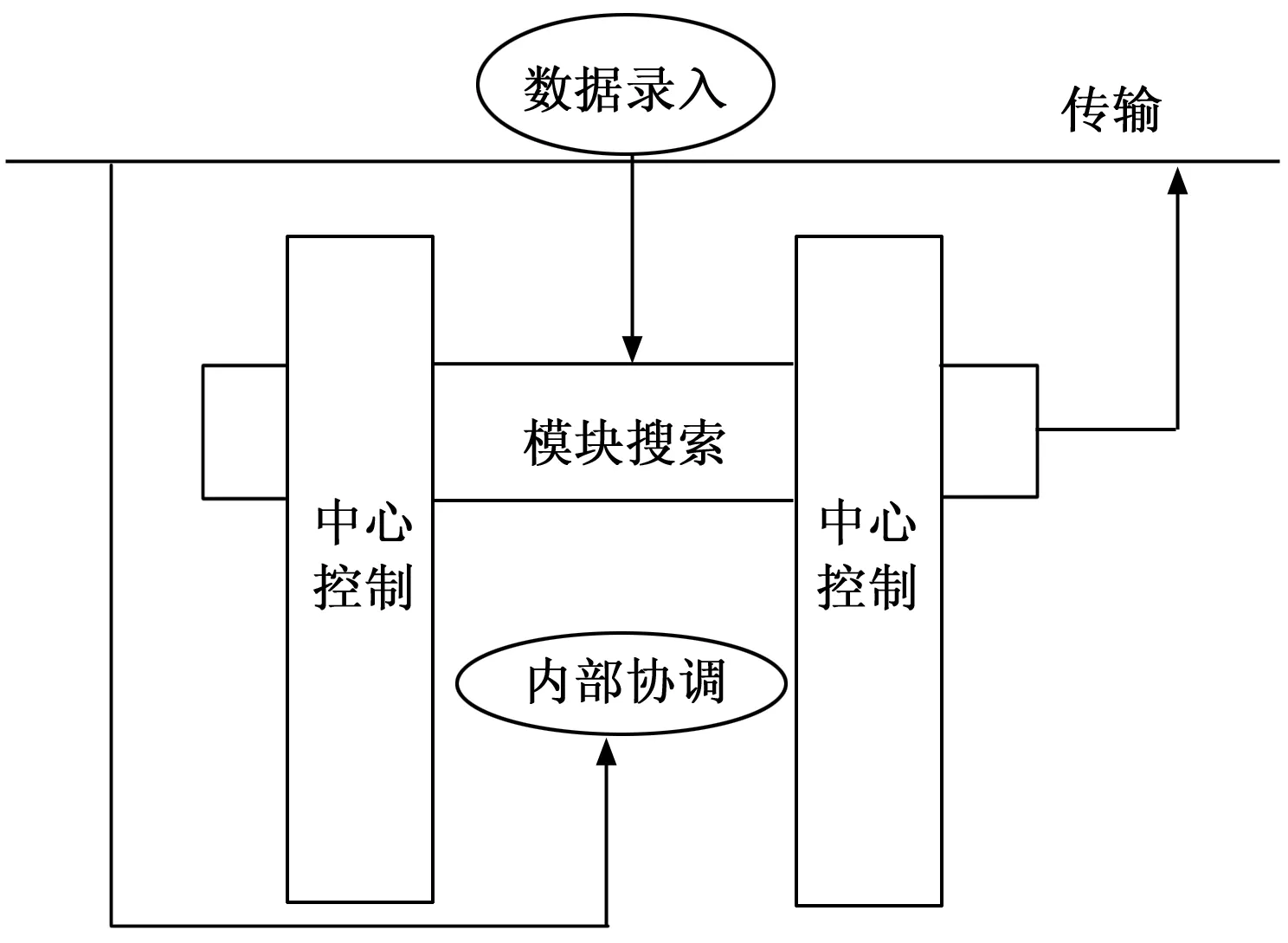
图4 数据协调控制图
在图4中,选取的协调控制器具有20相位控制,56路输出,每路驱动能力为600 W,采用光电转换隔离技术,完整反映交通客流信号信息,减少了不必要的系统操作浪费。机内设置12个时段配时,可选相位方案、黄灯或感应模式,带有以太网连接口,RS232连接口,经过光纤收发器或无线路由器通过光纤、网线、无线网与交通指挥中心联网,实时记录交通客流信息,以便对系统的协调控制操作,完善系统操作,提升系统的协调控制有效率[14]。
1.4 整流器设计
电感与电容不规范电信号组N中的不规范电信号的产生主要是由于脉动电流与脉动电压在被吸收与释放的过程中剧烈波动所产生的,本文可以通过深度学习分析检测结构对经过抽象化的该类不规则电信号的波动形式进行分析,来确定是否是发电厂变频器的电感与电容发生了故障,如果该类不规则电信号的波动幅度超过了636 V,则说明是由于发电厂变频器的电感与电容由于超负载运动被破坏进而造成了发电厂变频器的过压故障,如果该类不规则电信号的波动幅度没有超过636 V,则说明发电厂变频器出现的过压故障不在电感与电容结构当中。逆变器结构图如图5所示。

图5 逆变器结构图
2 基于GIS的短时交通客流智能协调控制系统应用程序设计
为提升系统设计的协调控制有效率,本文针对GIS收集的交通客流路面状况展开精准分析,首先,匹配GIS中的遥感信息点,按照信息点的位置设置控制参数,并集中对参数的存储,完善系统内部结构,设置系统应用程序内部结构完善如图6所示。
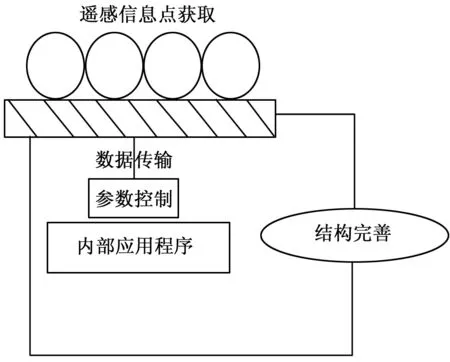
图6 系统应用程序内部结构完善图
整合GIS内部数据库信息,并在其中挑选客流方向数据,设置挑选方程式如下:
(1)
式中,K表示为挑选结果数据,A表示为系统结构参数,S表示为数据库信息,N代表挑选的数据整体数量。在经过上述操作后,调节显示数据模式,并加强对中心系统环节的管理,保证数据的安全存储与管理。在初始状态下,设置单个交叉口监控装置,判定客流均衡数据,并设置判定公式:
J=K·(v-t)
(2)
式中,J表示为判定结果数据,K表示为调节数据,v表示为车辆通过速度,t表示为客流量持续时间参数。由此获取系统所需判定数据,集中对判定数据的记录操作,若单个路口控制数据不足以支撑系统研究需求,则向相邻路口发送请求指令,实现双方协调,直至得到较为满意的协调结果[15]。
逆变器不规范电信号组K中的不规范电信号的产生主要是由于逆变器负载负担过大或者与控制电路配合不当产生的,本文对经过抽象化的该类不规则电信号通过式(3)来进行计算,分析是否是发电厂变频器的逆变器出现了故障进而导致了发电厂变频器的过压故障。
K·dk=∮F·df
(3)
其中:K即为逆变器不规范电信号组K,F与f则为逆变器将直流电源转换为所要求频率的交流电源的具体电信号指令,如果将不规范电信号组K代入上述公式后符合上述关系,则说明逆变器不规范电信号的存在不会对逆变器的工作造成影响,如果不符合上述公式关系,则说明发电厂变频器的过压故障与逆变器结构有着直接的关系,将区域GIS信息上传至主系统中,设置应用程序内部设计操作流程图如图7所示。
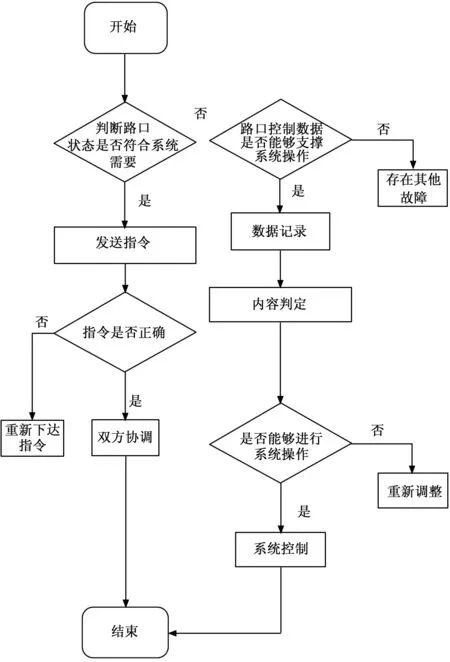
图7 应用程序系统内部设计流程图
在图7中,系统数据得到较好的释放,能够更为集中地实现系统管制处理,加强交叉口间的联系,并固定交叉口监控装置位置,整合各监控方向,并设置较为稳定的数据传输通道,确保数据的安全完整流通。在交通口信号灯发生变化时,向中心系统发送传导指令,控制监控装置的记录程序,当预测交通量超过了预期数值时,调整数值参数,根据通讯的需要调节通讯系统,构建系统与GIS网络间的联系模型,并设置联系方程式:
G=∑J-L
(4)
式中,G表示为联系构建关系参数,J表示为通讯系统要求参数,L表示为GIS网络需求数据。据此实现对系统整体应用程序的设计,完善系统协调控制性能。
3 实验与研究
为精准评估本文基于GIS的短时交通客流智能协调控制系统的协调控制性能,设置相应的实验环境进行性能检验,采用文献[3]设计系统和文献[4]设计系统作为实验对比方法,验证实验效果对比结果。
针对GIS检测的数据庞杂性以及短时交通客流智能协调控制任务执行的困难性,需对其实验环境进行数据筛选,本文实验的操作步骤如下:
1)调节GIS检测数据参数,包括交通道路状况以及人流密集状况数据。
2)对选取的客流数据进行训练预测,由于操作的数据具有多维特点,为此,在实验过程中将数据多维特征去除,保护中心系统操控流程。
3)利用GIS网络对交通量的预测数据进行再预测,同时预处理相关数据,将数据数据数值控制在0至1范围内,以避免产生干扰数据。在网络训练前,对交通客流信息归一化处理,调整归一化数值系统储存位置,并结合流量监测系统时刻监测数据变化,及时作出变化反应。
在此实验中,根据两个不同的实验参数进行实验对比,进一步提高整体对比效果,并设置相应的实验参数表如表1所示。

表1 实验参数
以Udacity自动驾驶数据(https://www.udacity.com/self-driving-car)作为实验数据,在表1实验条件下,采用不同方法对交通客流量进行智能协调控制,记录控制时长及控制效果,得到协调控制有效率对比图如图8所示。
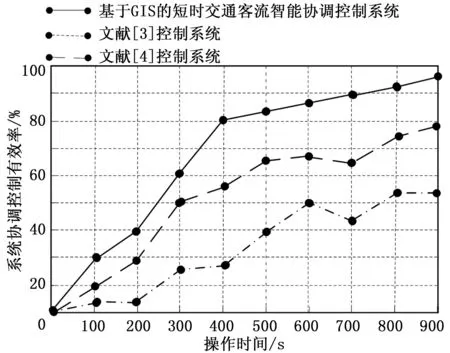
图8 系统协调控制有效率对比图
分析图8可以看出,文献[3]控制系统的控制有效率平均值为60%,文献[4]控制系统的控制有效率平均值为42%,而所提基于基于GIS的短时交通客流智能协调控制系统的控制有效率平均值为83%,由此可见,所提方法的控制有效率较高,对交通客流的控制效果好。
在此基础上测试客流量为60辆汽车时不同方法的操作时长,得到系统操作时长对比图如图9所示。

图9 系统操作时长对比图
根据以上图示可以分析出,文献[3]控制系统设计具备较高的系统协调控制有效率,但系统操作时长较长为44 s,文献[4]控制系统操作时长为27 s,而本文基于GIS的短时交通客流智能协调控制系统操作时长均短于其他两种系统,为20 s。本文系统设计集中于提升系统的调配性能,完整再现GIS检测模式下客流信息状况,对于数据的集中处理效果较好,促使协调控制有效率较高,操作时长较短。
综上所述,基于GIS的短时交通客流智能协调控制系统能够更好地调整客流智能协调控制系统信息调配状况,收集较为精准的数据信息,具备较高的协调控制有效率,研究价值较优。
4 结束语
本文在传统短时交通客流智能协调控制系统设计的基础上提出了一种新式基于GIS的短时交通客流智能协调控制系统设计,实验表明,该系统对交通客流量的协调控制效果较好,且控制耗时较短,具有一定的有效性。
猜你喜欢
环球时报(2022-12-12)2022-12-12 17:14:03
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
科技传播(2019年24期)2019-06-15 09:29:28
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
自动化学报(2017年4期)2017-06-15 20:28:55
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:37
中央民族大学学报(自然科学版)(2015年2期)2015-06-09 08:45:20
电网与清洁能源(2015年2期)2015-02-28 16:03:08
电测与仪表(2014年22期)2014-04-04 11:55:06
汽车电器(2014年8期)2014-02-28 12:14:29