
基于流向图的不完备信息下导弹故障诊断知识获取
2021-02-22 11:35刘兆政肖明清胡阳光李剑峰王俊东
计算机测量与控制 2021年1期
刘兆政,肖明清,胡阳光,2,李剑峰,王俊东
(1.空军工程大学 航空工程学院,西安 710038; 2.西北工业大学 航天学院,西安 710072;3.中国人民解放军 95920部队,河北 衡水 253801)
0 引言
随着科技的不断发展,机械自动化水平不断提高,机械功能的满足需要提高系统复杂程度才能实现。近些年复杂机械产生的机械故障也导致事故案件的频繁发生,保障工程机械设备的安全稳定运行成为亟待解决的问题[1]。现代机械的使用环境多样,工作状况复杂,机械结构往往呈现出状态信息不完备的形态,导致描述工程机械故障诊断的数据存在不完备的信息。
相关学者对于不完备条件下的机械故障诊断涉及多个方面的研究,张铮提出粗糙集理论,对不完备故障信息进行属性约简,建立智能故障诊断模型,为复杂设备的故障诊断提供了新的方法[2];周頔将对不完备数据进行完备化之后,利用蚁群算法优化神经网络,实现系统故障诊断[3];陈士刚等利用多重支持向量域对高压隔离开关进行不完备故障类别下的故障诊断[4]。不完备下的机械故障诊断方法大多从数据处理分析的角度进行算法优化,缺少故障位置之间的图形化直观展示。
流向图理论是波兰学者Z.P.在2003年的粗糙集理论国际会议上提出的[5],是一种将故障征兆属性值故障类型图形化表达的新方法,并运用于机器学习、模式识别、系统分析等各种专业领域的研究。许志铭等人通过流向图完成对柴油机箱的故障诊断研究[6];黄文涛等人将流向图应用于数据挖掘以及决策规则提取[7];于军等利用流向图进行齿轮箱故障诊断的知识发现[8]。流向图的广泛运用对于不完备信息下的故障诊断,具有较好前景。
传统的导弹故障诊断主要是利用有限的诊断知识并结合领域专家的经验得到诊断的结果,而诊断知识的不完备性给诊断的过程带来极大问题。由于导弹具有“长期贮存,一次使用”的特点,可以获得的故障诊断数据有限,如何充分利用有限的不完备故障诊断知识对故障进行分类和获取,是研究的热点问题。
这些研究方法都是流向图的具体运用,针对故障诊断的具体问题,可以将诊断推理的流程图形化表述,获得准确有效的故障诊断知识,为不完备条件下刻画故障原因和故障征兆之间的关系提供更为清晰的展现。本文首先分析不完备信息系统的定义,并具体说明一个不完备信息系统的主要构成要素;然后根据特征关系对不完备故障诊断信息进行处理,提高导弹故障诊断实例分类的准确率;最后,利用不完备信息流向图对其进行知识获取,计算路径的置信度和覆盖度,得到最终的完整路径,为导弹的故障诊断工作提供有效参考。
1 不完备信息系统
不完备信息系统是对比传统信息系统而言的,传统信息系统通常都是完备的,即一个对象在确定属性下的取值是存在且唯一的,而现实的系统往往会因为各种问题,造成数据的偏差、对数据的定义不准确等情况,进而产生不完备信息系统,例如在齿轮箱系统中,由于零件极易发生各种类型的故障,但故障产生的原因各有不同,因此采集到的齿轮箱故障诊断信息就是存在偏差的不完备信息[9]。
对比传统的完备状态下的信息系统,即一个任意属性值在确定条件下的取值是存在且唯一的,可以得到不完备故障诊断信息系统的定义是指由于信息获取的过程中出现机械故障,或者在信息传递的过程中出现错误的诊断信息,而导致缺失属性值的情况,形成不完备故障诊断信息系统。类比完备信息系统的定义,可以得到对于不完备信息系统的定义如下:
建立完备一个不完备信息系统,一个四元组S={U,AT,V,f}可以描述为信息系统S,其中U是代表对象的有限非空集合,称为论域;AT是代表描述对象的所有属性的有限非空集集合,称为属性集;Va表示属性a的所有可能取值,称为属性a值域;V表示所有属性的可能取值,称为属性值域;定义信息函数f为U×AT到V的一个映射,即对任意的x∈U,a∈AT,f(x,a)∈Va[10]。
例如,在一个典型的导弹导引系统不完备信息故障诊断实例中,为判断系统内陀螺是否完好,取测试点TP1,TP2,TP3测量陀螺频率,得到该系统故障诊断决策表如表1所示。
其中,对象集合U={u1,u2,u3,u4,u5,u6,u7}表示陀螺的7个健康状态,AT={T1,T2,T3}为该系统的三个征兆属性,VT1={VL,L,N,H},VT2={L,N,H},VT3={*,L,N,H},其中VL表示非常低,L表示偏低,N表示正常,H表示偏高,*表示空值。

表1 陀螺不完备故障诊断决策表
设不完备信息系统S={U,AT,V,f},令属性集B⊆AT,对a∈AT和v∈V,(a,v)是一个属性值对;若属性值是已知的,则满足a(x)=v的所有实例x∈U组成的集合为属性值对(a,v)的属性值对块[11],记为[(a,v)]。
定义未知属性值为以下两种,第一种称为缺失属性值,用符号“?”表示,用于定义在陀螺频率测量过程中丢失的信息,且该种类属性值不可比较、不可以用已知属性值替代;第二种称为未知属性值,用符号“*”表示,用于定义未知信息,但可以用已知属性值替代的未知属性值。则缺失属性值的属性对块为[(a,?)]=U,未知属性值的属性对块为所有包含a的属性对块的交集。
设不完备信息系统S={U,AT,V,f},令属性集B⊆AT,对于∀x∈U,则实例x在属性集B下的特征集KB(x)为所有属性值对块的交集:
(1)
特征关系R(B)定义如下[12]:
R(B)={(x,y)∈U×U|y∈KB(x)}
(2)
采用特征关系处理两种未知属性值,是根据其优于容差关系和非对称相似关系的性能,可以将两种不同属性类别的不完备故障统一处理[13]。
2 不完备故障诊断流向图
定义不完备条件下的故障诊断信息系统流向图为有向、非循环图IG=(N,M,D,B,φ),N为节点的集合;M为征兆属性节点集合,M={m1,m2,…,mm},征兆属性m1的值域是指系统在征兆属性m1条件下所有的状态集合;D为决策属性节点集合,D={d};决策属性d的值域是指系统所有状态的决策属性集合;B⊆N×N为有向分支集合,φ定义为流量,任意一个属性节点x的输入和输出分别由I(x)和O(x)[14]。
定义不完备故障诊断流向图IG=(N,M,D,B,φ)的任意一个征兆属性节点,定义输入流量为:
(3)
输出流量定义为:
(4)
任意一个决策属性节点的输入流量定义为:
(5)
从征兆属性节点mi(x)到决策属性节点dj的有向路径定义为mi(x),…,dj,其完整路径可以表示为[mi(x),…,dj]。
通过不完备流向图可以将决策表中的每个实例都用完整的路径表示出来,为了进一步定量分析不完备流向图中每一条路径的可靠程度,引入置信度和覆盖度的概念,定义如下。
定义不完备流向图中的置信度为:
(6)
其中:instance{[m1(x),…,mi(x),dj]}为路径中表示已知属性节点的实例个数,instance{[m1(x),…,mi(x)]}为只满足路径条件中表示已知属性节点的实例个数。
定义不完备流向图中的覆盖度为:
(7)
其中:instance{[m1(x),…,mi(x),dj]}为路径中表示已知属性节点的实例个数,instance{[dj]}为只满足路径流向决策部分属性节点的实例个数[15]。
在不完备流向图中置信度表示路径的可靠程度,置信度越大依照该路径做出的故障诊断决策的可靠性越高;覆盖度表示此路径在流过其决策属性节点的路径中所占的比重。
3 实例分析
3.1 导弹不完备故障信息原因分析
导弹不完备故障诊断信息指的是在导弹测试过程中,某些数据或者一些事例存在不完整、丢失或者遗漏的未知属性值,进而影响导弹的故障诊断准确性。在现有的导弹故障诊断技术中,以往的历史数据起到重要作用。很多原因可能造成导弹故障诊断信息的不完备,而且造成的未知属性缺失也都有不同的特点,例如未知属性的来源可能是因为设备的失灵、损坏,也可能是由于数据在传输的过程中受到干扰,出现通信上的临时中断导致信息没有被有效采集。综合上述观点可以将导弹故障诊断信息不完备的原因分为以下三点:
1)导弹关键部件发生故障。在导弹故障诊断过程中,由于设备工作环境影响,工况复杂,其需要进行故障检测关键部件发生故障,造成采集的数据集中的一些关键数据及其某些征兆属性缺失,引发故障诊断信息不完备。
2)故障征兆属性值获取困难。由于导弹具有长期贮存,一次使用的特点,短时间内很难获取足够的故障诊断信息。而且测试、挂飞训练等通电时间较短,也导致诊断信息的测试周期或者性能可能没有满足测量设备,故障征兆属性的信息获取较为困难,也可能造成信息不完备。
3)数据归一化的影响。为了提取数据中的有效信息,一般需要对数据进行归一化处理,得到抽象层级的故障征兆属性值,但是由于在归一化进程中会引入一些错误或者矛盾数据,所以也会造成诊断信息不完备。
上述三个方面的原因造成了导弹故障信息的不完备,同时增加了导弹故障诊断的难度。
3.2 建立不完备故障诊断流向图
导弹系统中由于各个子系统、各个部件之间连接性比较强,考虑到导弹产生故障往往是在某一层级的子系统或者某个更小的单元,因此在确定导弹故障诊断知识的时候,要对关键部件的子系统进行分别建立故障诊断知识获取框架,得到最终整体的故障诊断知识获取结果,用于提高导弹故障诊断准确率。
陀螺是导弹导引系统的一个关键部件,主要由陀螺转子、万向支架和电机等组成,利用其定轴性保持导引头正常工作,利用进动性实现对于目标的跟踪,对于导弹能否有效发挥战斗力,击毁目标具有重要作用。在对陀螺进行故障诊断的过程中,通过测量陀螺频率可以有效计算陀螺耗电量,当导弹陀螺耗电量过大时,可能会导致在制导过程中无法持续跟踪目标。以导弹导引系统的陀螺为例,不完备条件下获取其故障诊断知识步骤如下。
首先,利用采集到的故障诊断信息提取故障特征,建立不完备陀螺不完备故障诊断系统诊断表;然后,基于特征关系对信息进行处理,提高故障分类的准确率;最后,绘制不完备故障诊断流向图,生成完整故障诊断路径,最终达到故障诊断知识表达和获取的目的。具体流程如图1所示。
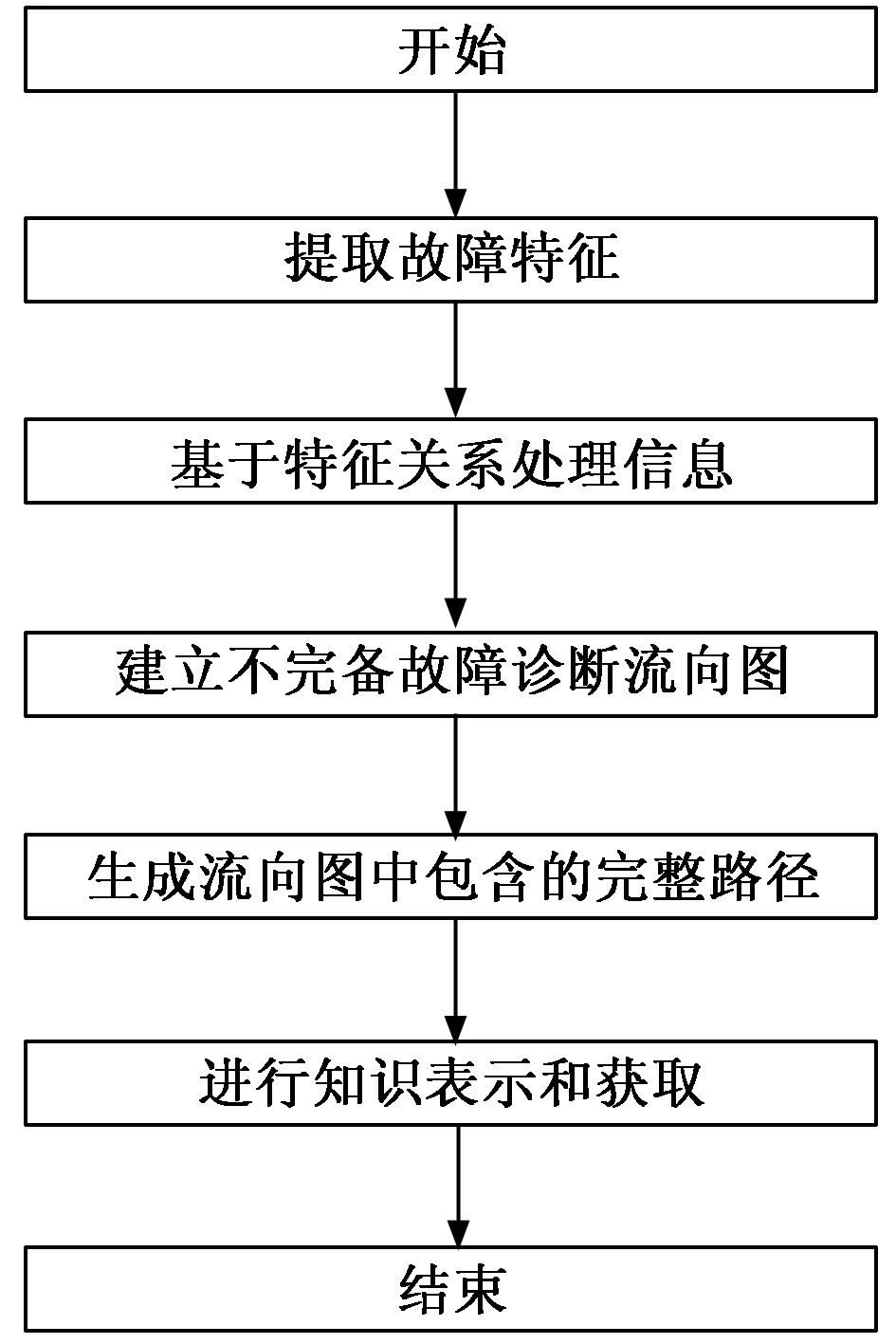
图1 知识获取流程
3.3 故障诊断知识获取实例
对其进行故障诊断知识获取研究分析。表2是由9个故障诊断实例构成的集合,即U={u1,u2,u3,u4,u5,u6,u7,u8,u9},其中U1={u1,u2,u3,u4,u5,u6,u7}为发生故障实例集,U2={u8,u9}为未发生故障的实例集。AT={t1,t2,t3}为征兆属性集,选取测试点TP1,TP2,TP3测量导弹该子系统的陀螺频率偏移量的大小,对数据进行离散化,k为在同一测试点相同实例的个数。出于对于数据的保密要求,本文对测试节点数据值采用偏离正常数据值得程度来表示,即偏小,正常,偏大。若偏小,则t(x)=1;若正常,则t(x)=2;若偏大,则t(x)=3。决策属性为d,其值域表示为{Y,N},其中决策属性值Y表示陀螺发生故障,决策属性值N表示陀螺工作状态良好。
利用特征关系对表2进行处理,根据属性值对块的定义,获得导弹陀螺仪不完备故障诊断信息系统中所有属性值对块如下[(a,v)]:
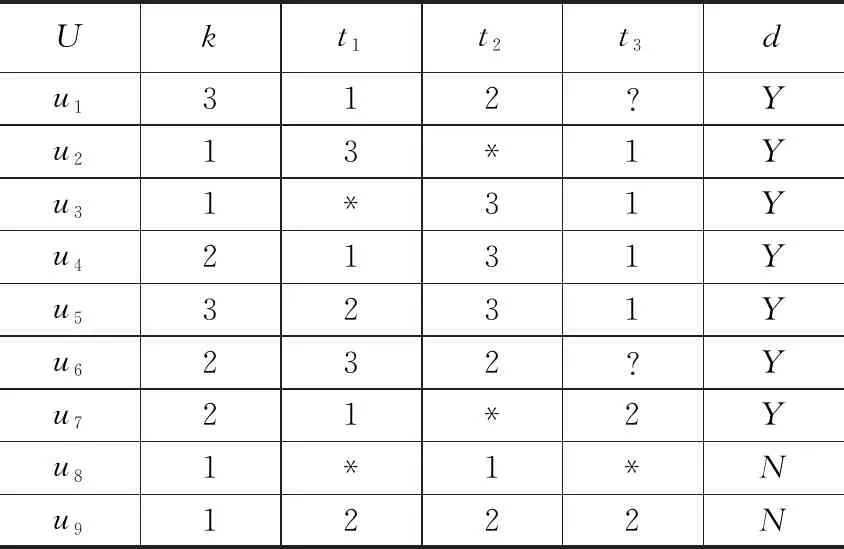
表2 陀螺不完备故障诊断决策表
[(t1,1)]={u1,u3,u4,u7,u8},[(t1,2)]={u3,u5,u8,u9},
[(t1,3)]={u2,u3,u6,u8},[(t2,1)]={u2,u7,u8},
[(t2,2)]={u1,u2,u6,u7,u9},[(t2,3)]={u2,u3,u4,u5,u7},
[(t3,1)]={u2,u3,u4,u5,u8},[(t3,2)]={u7,u8,u9}。
根据特征集的定义,计算该陀螺仪不完备故障诊断信息系统中各实例的特征集如下:
KC(u1)=[(t1,1)]∩[(t2,2)]∩U={u1,u7},同理可得:
KC(u2)={u2},KC(u3)={u3},
KC(u4)={u3,u4},KC(u5)={u3,u5},
KC(u6)={u2,u6},KC(u7)={u7},
KC(u8)={u8},KC(u9)={u9}。
由1节中对特征关系定义可知,该不完备诊断信息系统中各实例的特征关系如下:
R(C)={(u1,u1),(u1,u7),(u2,u2),(u3,u3),(u3,u4),(u4,u4),
(u5,u5),(u6,u6),(u6,u7),(u7,u7),(u8,u8),(u9,u9)}
经特征关系处理后,可以对实例进行有效分类,例如实例u1和实例u7属于同一特征集,且具有相同的决策属性值,因此,针对这种不完备的数据集,就可以通过相同的特征集对其进行判断,提高对于不完备故障诊断知识的处理能力,利用有限的故障知识获得对于实际工作的参考范例,同时提高故障诊断知识的分类准确率。
针对上述故障诊断决策表进行图形化表示,利用不完备故障诊断流向图,将故障征兆属性值和故障决策属性值之间的关系,具体清晰地表示出来。首先根据三个测试点的陀螺频率测量结果,确定出每个测试点实际的征兆属性,决策属性值表示是否发生故障,不完备属性值用“*”和“?”来表示。然后根据不完备故障诊断决策表中的情况,从左至右连接各个节点,形成有向分支,通过流向图中的有向分支可以清晰地掌握故障诊断的流程和数据之间的相互影响。最后,计算节点流量和有向分支流向,出于简化图形的目的,图中仅表示出节点、有向分支和节点流量,有向分支流量未在图中标出。建立不完备故障诊断流向图,如图2所示。
上述实例是以16个典型的故障样本进行分析,则根据2节对于不完备诊断流向图处理的相关理论,可以完整表述出故障诊断知识的路径。计算路径的置信度和覆盖度,部分完整路径及其相关指标如表3所示。
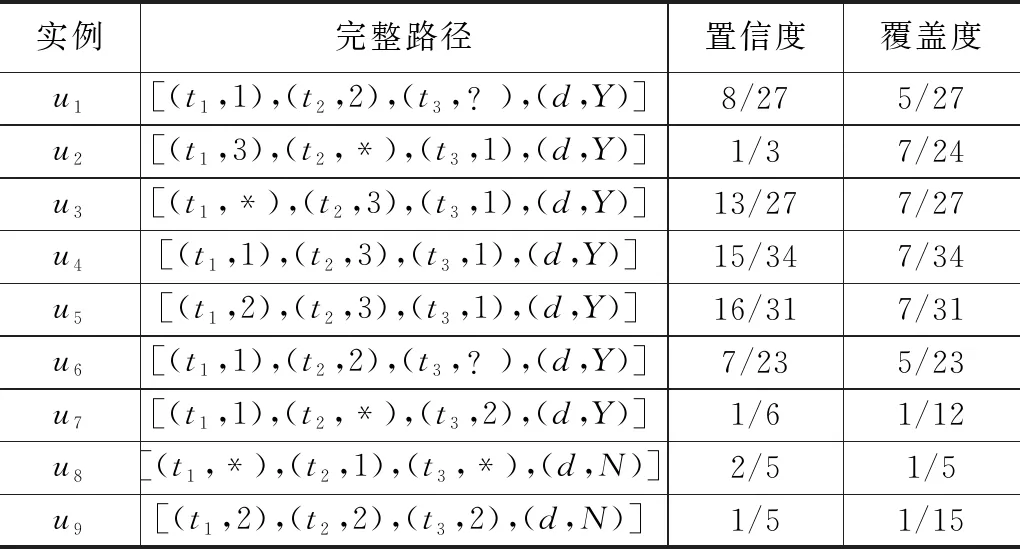
表3 不完备故障诊断流向图中包含的完整路径
通过上述路径计算结果可知,该方法可以定量描述故障诊断路径的可靠程度,在不完备故障诊断知识的获取和利用上取到了较好效果。
4 结束语
本文提出了不完备信息条件下导弹故障诊断知识的获取方法。通过导弹导引系统陀螺故障实例验证了该知识获取方法的可行性和有效性,通过特征关系处理,对故障诊断实例进行分类。结果表明,该方法可以准确表示故障诊断路径,并描述其可靠程度,通过不完备流向图的方法,充分利用和处理不完备信息,将其具体化、图像化,并在实际的导弹故障诊断过程中,较好地提高了不完备故障数据处理和利用效率。同时,在下一步工作中将对缺失故障数据的类别,进一步细化和处理,以扩大该方法的实际使用范围,更好地在工程实践中发挥作用。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年3期)2016-09-27
故事作文·高年级(2016年6期)2016-06-21
高中生学习·高三版(2014年3期)2014-04-29
高中生学习·高三版(2014年3期)2014-04-29
鸭绿江(2013年11期)2013-03-11
早期教育(美术教育)(2010年4期)2010-04-13
