
多工况下车辆非线性悬架滑模控制器设计
2021-02-20 15:59于志委苟中华何奇
内燃机与配件 2021年2期
于志委 苟中华 何奇







摘要:本文的目标是设计一种基于观测器的高阶滑模控制器(HOSMC)。为了模拟路面激励,建立多工况路面状态下不同速度的路面激励模型,之后建立二自由度非线性悬架模型,并考虑了控制力执行机构的动力学特性。该控制器被分解为两个回路—内环和外环。在内环中,设计高阶滑模控制器来跟踪混合参考模型的期望状态;在外环中,设计并应用了模糊控制器,根据滑模表面的到达情况来调节开关控制增益用来减少滑模控制力的振动影响。仿真结果表明:该系统可以极准确地反馈所施加的力,即使在不确定性的情况下;此外,所提出的控制器能有效地改善悬架的性能。
关键词:多工况行驶;非线性悬架;MATLAB/simulink;HOSMC
中图分类号: U461.4 文献标识码:A 文章编号:1674-957X(2021)02-0012-03
0 引言
通常车辆悬架系统是由盘簧、减震器、导向机构和一系列机械结构组成的。则主动悬架系统不仅能提高悬架性能,还能实现对车辆更好的控制。在过去几十年的研究中,针对车辆主动悬架系统许多学者提出一系列主动控制策略,例如线性二次调节、控制控制和自适应控制。Vu等通过求解基于线性二次型调节器的线性最优控制问题。Shukla等采用和最优控制器消除不同道路输入下的车辆振动。Na等提出自适应估计和控制方法,保证悬架响应的暂态和稳态。滑模控制因其结构简单、控制效果好而在车辆动力学系统中得到了广泛的应用。由于传统的滑模控制器(SMC)很难应用于参数未知的复杂系统,许多研究集中在不确定系统的控制算法组合上,如一阶滑模控制、分数阶滑模控制、滑模变结构控制[1]。
针对具有非线性动力学特性的主动悬架系统,本文提出了基于低阶滑模控制的高阶控制,并将控制系统分成两个回路构建。针对执行器模型固有的非线性和不确定性,采用一种新的自适应模糊控制执行器的外环,以保持执行器力跟踪期望力轨迹。针对内环,设计一种基于低阶滑模控制的高阶滑模控制器;考虑到车悬架模型的非线性,采用无迹卡尔曼滤波(UKF)为外环控制器提供必要的状态变量信息,以减少参考模型和实际模型的状态跟踪误差,在适当的控制力作用下,使系统达到期望的状态。
1 多工况路面激励模型
在空间域内,路面粗糙度可以看作是一个平稳的信号,确定路面粗糙度扰动的PSD值如下:
为了研究车身对路面振动的反应,首先对道路激励进行建模,利用白噪声滤波方法建立单轮道路的时域模型。当汽车以匀速u行驶时,单轮路面激励的时域模型可以表示为:
为了更能准确描述路面模型,本文的路面输入模型利用clock模块进行不同的路面激励和速度变化的仿真,路面输入的Simulink模型如图1和图2。
2 非线性悬架动力学模型的建立
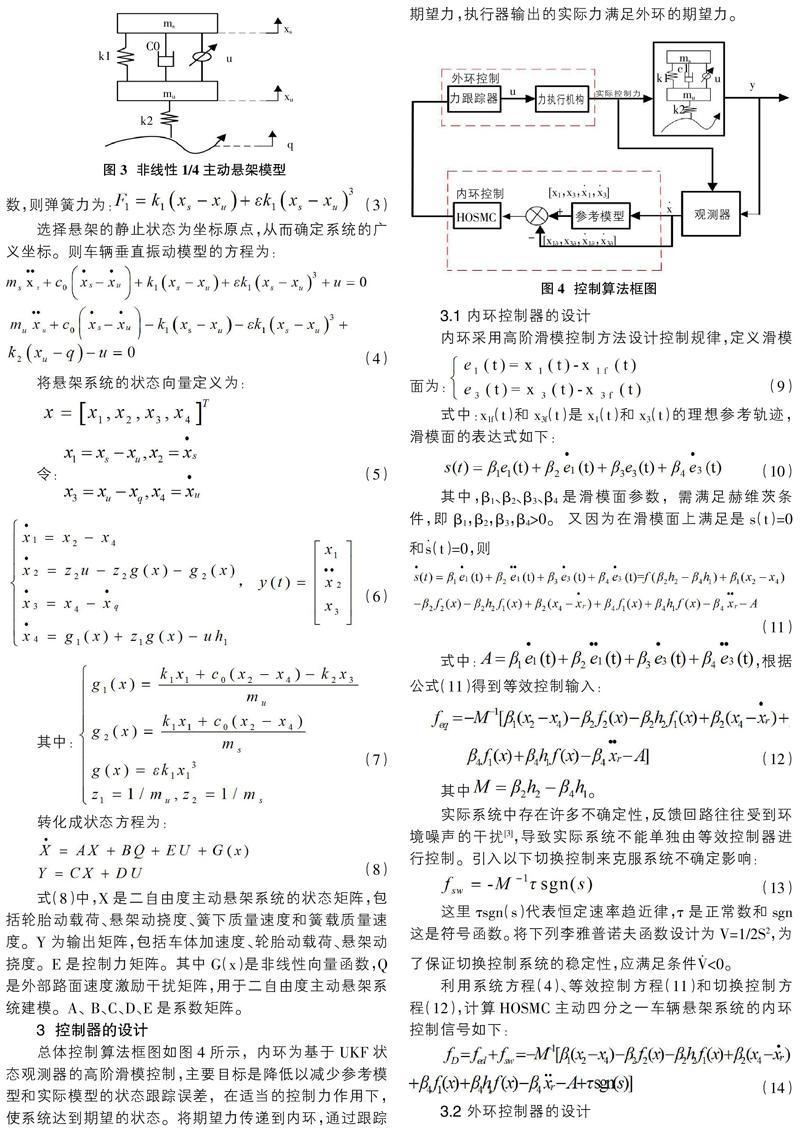
建立如图3所示的二自由度汽车垂向振动模型。ms车身质量,mu车轮质量,k1悬架系统弹簧常数,k2为车轮轮胎弹簧常数,c0为悬架系统阻尼常数,q为路面不平度激励,xu为车轮垂直位移,xs为车身垂直位移,u为执行器力。
悬架弹簧为非线性刚度弹簧,令?着为非线性弹簧系数,则弹簧力为:
选择悬架的静止状态为坐标原点,从而确定系统的广义坐标。则车辆垂直振动模型的方程为:
将悬架系统的状态向量定义为:
转化成状态方程为:
式(8)中,X是二自由度主动悬架系统的状态矩阵,包括轮胎动载荷、悬架动挠度、簧下质量速度和簧载质量速度。Y为输出矩阵,包括车体加速度、轮胎动载荷、悬架动挠度。E是控制力矩阵。其中G(x)是非线性向量函数,Q是外部路面速度激励干扰矩阵,用于二自由度主动悬架系统建模。A、 B、C、D、E是系数矩阵。
3 控制器的设计
总体控制算法框图如图4所示,内环为基于UKF状态观测器的高阶滑模控制,主要目标是降低以减少参考模型和实际模型的状态跟踪误差,在适当的控制力作用下,使系统达到期望的状态。将期望力传递到内环,通过跟踪期望力,执行器输出的实际力满足外环的期望力。
3.1 内环控制器的设计
内环采用高阶滑模控制方法设计控制规律,定义滑模面为:
式中:x1f(t)和x3f(t)是x1(t)和x3(t)的理想参考轨迹,滑模面的表达式如下:
其中,?茁1、?茁2、?茁3、?茁4是滑模面参数,需满足赫维茨条件,即?茁1,?茁2,?茁3,?茁4>0。 又因为在滑模面上满足是s(t)=0和■(t)=0,则
实际系统中存在许多不确定性,反馈回路往往受到环境噪声的干扰[3],导致实际系统不能单独由等效控制器进行控制。引入以下切换控制来克服系统不确定影响:
利用系统方程(4)、等效控制方程(11)和切換控制方程(12),计算HOSMC主动四分之一车辆悬架系统的内环控制信号如下:
3.2 外环控制器的设计
模糊控制器的解是面积重力法。在模糊控制输出的情况下,切换控制增益的控制调整规则选择为:
其中G为增益系数的调整因子,满足G>0。
4 仿真与结果分析
为了更好比较高阶滑模控制的鲁棒性,在此基础上引用状态观测器控制。在MATLAB/simulink中建立主动悬架结构模型,连接不同路面不平度,并和被动悬架、一阶滑模控制相对比。得到仿真结果如图5至图7所示。
从图5可以看出,无论是现有的HOSMC控制还是SMC控制,都能明显减小车身垂直振动加速度,且HOSMC控制减小幅度更大;从图6可以看出,相对被动悬架,两种主动悬架的动载荷均有所减少,但减少幅度并不大;从图7可以看出,相对被动悬架,两种主动悬架的动扰度均大幅降低,且HOSMC控制振幅更小。
为更精确直观地反映两种主动悬架和被动悬架在各工况路面上的各性能指標,在MATLAB中通过计算得到了各指标的均方根值。
从表1可知HOSMC控制悬架相对现有SMC悬架身垂直加速度减小了20.06%,轮胎动载荷减少2.35%,悬架动扰度则降低了10.98%。
5 结论
本文设计了一种基于抗扰动的模糊滑模控制边界层的控制器,并构造了观测器成功地估计了悬架状态。用模糊逻辑控制调节滑模控制器的滑模面。所有模型的建立都是为了保持高度非线性的系统稳定。在某种程度上,李亚普诺夫稳定性得到了保证。一个扩展的状态观测器来估计未知干扰和参数,假设的外部干扰几乎被完全隔离。实验结果表明,该方法能够很好地跟踪动态输入信号,能够抑制输出扰动和参数变化,抖振几乎为零。
参考文献:
[1]秦武,上官文斌,吕辉.非线性二自由度主动悬架滑模控制方法的研究[J].机械工程学报,2020,56(01).
[2]高坤明,秦志昌,郭宗和,马驰骋,马迎坤.基于多目标遗传算法的主动悬架滑模控制器设计[J].三峡大学学报(自然科学版),2020,42(03):106-112.
[3]Van-Nam Giap,Shyh-Chour Huang. Euuectiveness ou uuzzy sliding mode control boundary layer based on uncertainty and disturbance compensator on suspension active magnetic bearing system[J]. Measurement and Control,2020,53(5-6).
