
基于STM32的摆盘覆土机激光导航控制系统的研究
2021-02-18 00:46:37杨楠霍艳忠逯文博伽伦李磊
科技研究·理论版 2021年14期
关键词:激光雷达
杨楠 霍艳忠 逯文博 伽伦 李磊
摘要:我国十二五发展规划中特别明确指出精准设施基础农业与现代精准农业的结合重要性,发展精准农业的关键是准直行走技术,采用激光导航技术,控制器上采用了增量式PID反馈调节方式对行走方向进行调节,从而使农机按照既定路径行走。针对自动化农机的应用需求,提出了一种应用于摆盘覆土机自主行走的激光导航控制系统。该系统利用激光发射与接收将控制信号传递给控制器。在以摆盘覆土机为研究对象进行了测试,完成了自主行走及导航自动化。该激光导航系统对于复雜地形的自动行走适用性强,信息采集快速准确,可靠性高。
关键词:激光导航;激光雷达;路径跟踪;综合定位;STM32
0引言
目前已经有些小型电动农机基本上不能自动准直行走,行走过程需要人为的控制行走方向,控制精度低,人力成本高,针对上诉问题对系统进行了改进,利用激光照射距离远,发散角小等特点,为摆盘机准直行走提供引导信号,设计一套激光导航的自动控制系统。依据动作要求,设计接收器自动找正装置快速找正定位,感应的激光的接收器将激光信号传递给控制器,控制器通过计算与逻辑判断,控制转向执行机构实现准直行走功能。采用增量式PID控制,有效提高系统准直行走精度。
1.激光导航控制系统的工作原理
1.1. 机器运行测距的方法
常见的激光测距方法主要有脉冲法,相位法,三角法[1]等,激光三角测量法原理和结构简单,对硬件的要求低,而测量范围和测量精度可满足大部分应用场景需求,应用效果的性价比极高[1],因此得到了更普遍的应用,
三角测距中激光雷达会与待测量目标之间形成一个三角形,利用该三角形的几何关系即可实现对目标距离的估计,A点为激光发射点,B点为激光接收点。P点为待测量的目标。α角为激光发射角,AB为激光发射点与接收点之间的距离。均可通过图3所示激光测距模块确定,β为已知量。A点发射的激光,击中P点后,反射到B点,可以测量β角的大小,可唯一确定出该三角形,并求出d的距离[2],
另外由于接收点B的激光接收面大小有限,所以该方法一般只能对近距离目标测量,常为几米。
1.2. 自动导航路径的路径跟踪方法
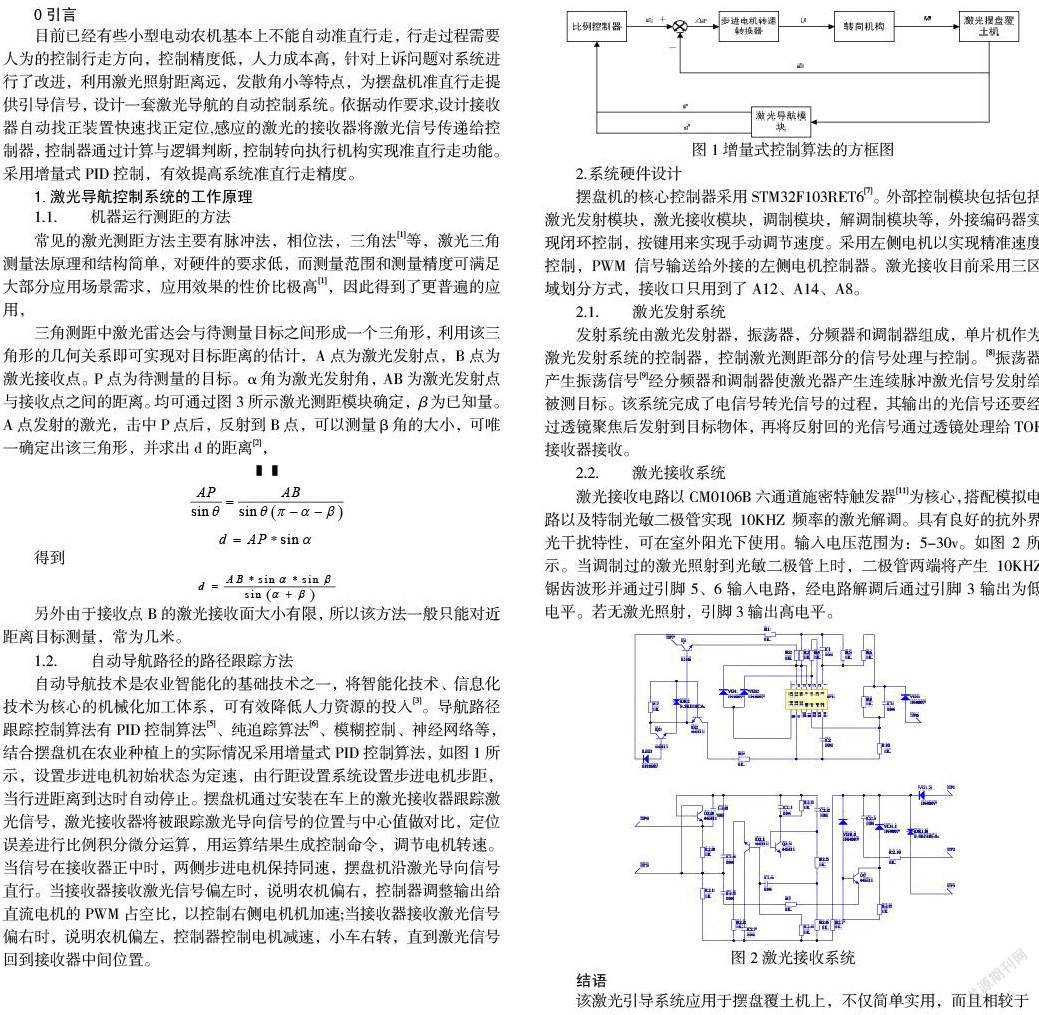
自动导航技术是农业智能化的基础技术之一,将智能化技术、信息化技术为核心的机械化加工体系,可有效降低人力资源的投入[3]。导航路径跟踪控制算法有PID控制算法[5]、纯追踪算法[6]、模糊控制、神经网络等,结合摆盘机在农业种植上的实际情况采用增量式PID控制算法,如图1所示,设置步进电机初始状态为定速,由行距设置系统设置步进电机步距,当行进距离到达时自动停止。摆盘机通过安装在车上的激光接收器跟踪激光信号,激光接收器将被跟踪激光导向信号的位置与中心值做对比,定位误差进行比例积分微分运算,用运算结果生成控制命令,调节电机转速。当信号在接收器正中时,两侧步进电机保持同速,摆盘机沿激光导向信号直行。当接收器接收激光信号偏左时,说明农机偏右,控制器调整输出给直流电机的PWM占空比,以控制右侧电机机加速;当接收器接收激光信号偏右时,说明农机偏左,控制器控制电机减速,小车右转,直到激光信号回到接收器中间位置。
2. 系统硬件设计
摆盘机的核心控制器采用STM32F103RET6[7]。外部控制模块包括包括激光发射模块,激光接收模块,调制模块,解调制模块等,外接编码器实现闭环控制,按键用来实现手动调节速度。采用左侧电机以实现精准速度控制,PWM信号输送给外接的左侧电机控制器。激光接收目前采用三区域划分方式,接收口只用到了A12、A14、A8。
2.1. 激光发射系统
发射系统由激光发射器,振荡器,分频器和调制器组成,单片机作为激光发射系统的控制器,控制激光测距部分的信号处理与控制。[8]振荡器产生振荡信号[9]经分频器和调制器使激光器产生连续脉冲激光信号发射给被测目标。该系统完成了电信号转光信号的过程,其输出的光信号还要经过透镜聚焦后发射到目标物体,再将反射回的光信号通过透镜处理给TOF接收器接收。
2.2. 激光接收系统
激光接收电路以CM0106B六通道施密特触发器[11]为核心,搭配模拟电路以及特制光敏二极管实现10KHZ频率的激光解调。具有良好的抗外界光干扰特性,可在室外阳光下使用。输入电压范围为:5-30v。如图2所示。当调制过的激光照射到光敏二极管上时,二极管两端将产生10KHZ锯齿波形并通过引脚5、6输入电路,经电路解调后通过引脚3输出为低电平。若无激光照射,引脚3输出高电平。
结语
该激光引导系统应用于摆盘覆土机上,不仅简单实用,而且相较于GPS系统来说成本低,商业化难度小易于扩展市场。具有广阔的应用前景。摆盘机自动控制系统的研发可保证长期的、重复的、不受时间限制的连续工作,提高劳动的生产效率;降低人力成本;摆盘覆土机自动导航技术将传感器技术、检测技术、人工智能技术、通信技术、精密及系统集成等集成于一身,其作业质量比驾驶员人工操作农业机械作业质量高,可保证相同的作业行距以及间距,摆盘更整齐,覆土更均匀。
参考文献
[1]孙有春,庞亚军,白振旭,等.激光三角测量法应用技术[J].激光杂志,2021,42(04):1-8.
[2]王晓嘉,高隽,王磊.激光三角法综述[J].仪器仪表学报,2004(S2):601-604.
[3]唐黎标.农业机械化自动导航技术研究[J].农机科技推广,2020(12):18-19.
[4]魏爽,李世超,张漫,等.基于GNSS的农机自动导航路径搜索及转向控制[J].农业工程学报,2017,33(S1):70-77.
[5]张智刚,罗淆文,赵祚喜,等.基于Kalman滤波和纯追踪模型的农业机械导航控制[J].农业机械学报,2009,40(S1):6-12.
[6]周江.STM32单片机原理及硬件电路设计研究[J].数字技术与应用,2015(11):1.
[7]周宇,张国平,徐洪波,等.激光测距发射电路的设计[J].电子设计工程,2017,25(03):145-148.
[8]王志强.用于半导体激光器的脉冲信号发生器的设计与实现[D].吉林大学,2012.
[9]周江.TTL、CMOS及施密特触发器[J].大众科技,2016,18(09):40-42.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国交通信息化(2021年8期)2021-11-02 05:26:02
汽车观察(2021年8期)2021-09-01 10:12:41
空间科学学报(2020年6期)2020-07-21 05:36:50
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
