隧道悬挂式轨道灭火机器人远程控制和监测系统的研发
2021-02-17 07:15:42侯天阳舒启林
成组技术与生产现代化 2021年4期
侯天阳,舒启林
(沈阳理工大学 机械工程学院,辽宁 沈阳 110159)
随着我国经济建设的飞速发展,隧道交通已经变得越来越重要,而针对隧道消防安全问题,目前的研究仍存在不足[1]。周庆等研究发现,在很多封闭环境,消防人员很难接近火源,若不能及时扑灭火源,大量浓烟在隧道内积聚,将严重危及灭火人员和周围居民的生命与财产安全,因此第一时间发现火情是控制和消灭火灾的最佳时机[2]。鲍明松等设计的消防侦查灭火机器人虽然可以进入火灾现场,但应用场景为隧道内时,该履带式灭火机器人的效率低下,不能满足时效性的要求[3]。在隧道监测与控制方面,曹晓钰等基于STM32主芯片设计了隧道内实时监控系统,但该设计仅用于监视,并未真正实现控制功能[4]。
本文以隧道悬挂式轨道灭火机器人为载体,以隧道内灭火为应用场景,基于物联网[5-6],将软件与硬件结合起来,对隧道悬挂式轨道灭火机器人远程控制和环境监测系统的核心技术进行研究,使用悬挂式轨道灭火机器人进行远程灭火并对环境温湿度进行实时监测,以提高火灾监测救援的效率。
1 隧道消防远程控制和监测系统的设计
1.1 隧道悬挂式轨道灭火机器人
利用物联网远程控制悬挂式轨道灭火机器人,可以实现实时灭火,提高隧道的安全性。其中:悬挂式轨道灭火机器人(图1)悬挂在隧道上部的滑轨内;滑轨固定在隧道的顶部两侧。悬挂式轨道灭火器人所处环境一旦出现火情,报警系统会立即启动,并将监测数据传向客户端;客户端可以根据隧道的长度控制悬挂式轨道灭火机器人沿着滑动轨道快速移动;灭火机器人通过控制器调整火灾控制执行器的侧喷嘴位置和姿势,进行灭火,从而保证隧道灭火的及时、顺利进行。隧道悬挂式轨道灭火机器人在隧道内的悬挂位置如图2所示。
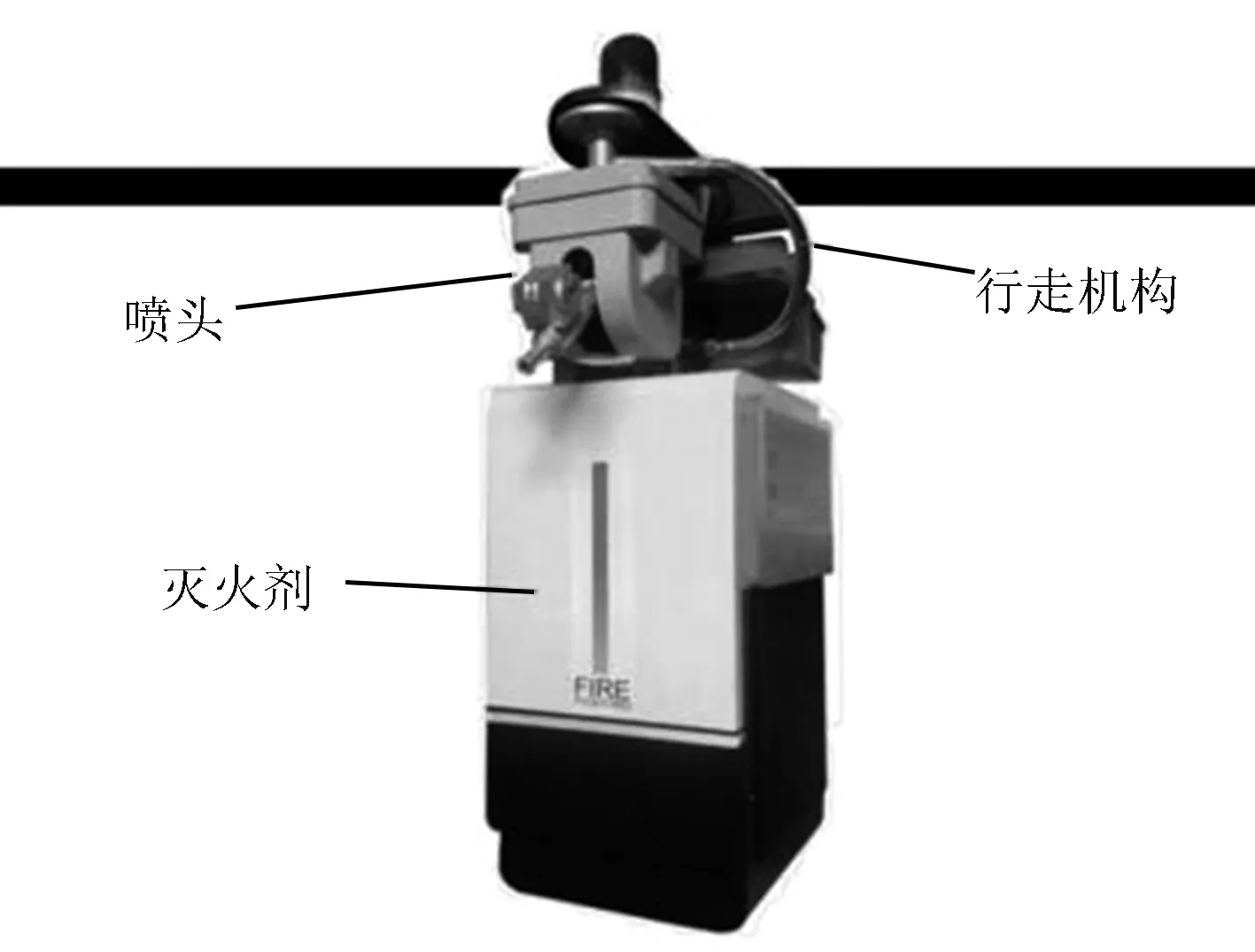
图1 悬挂式轨道灭火机器人
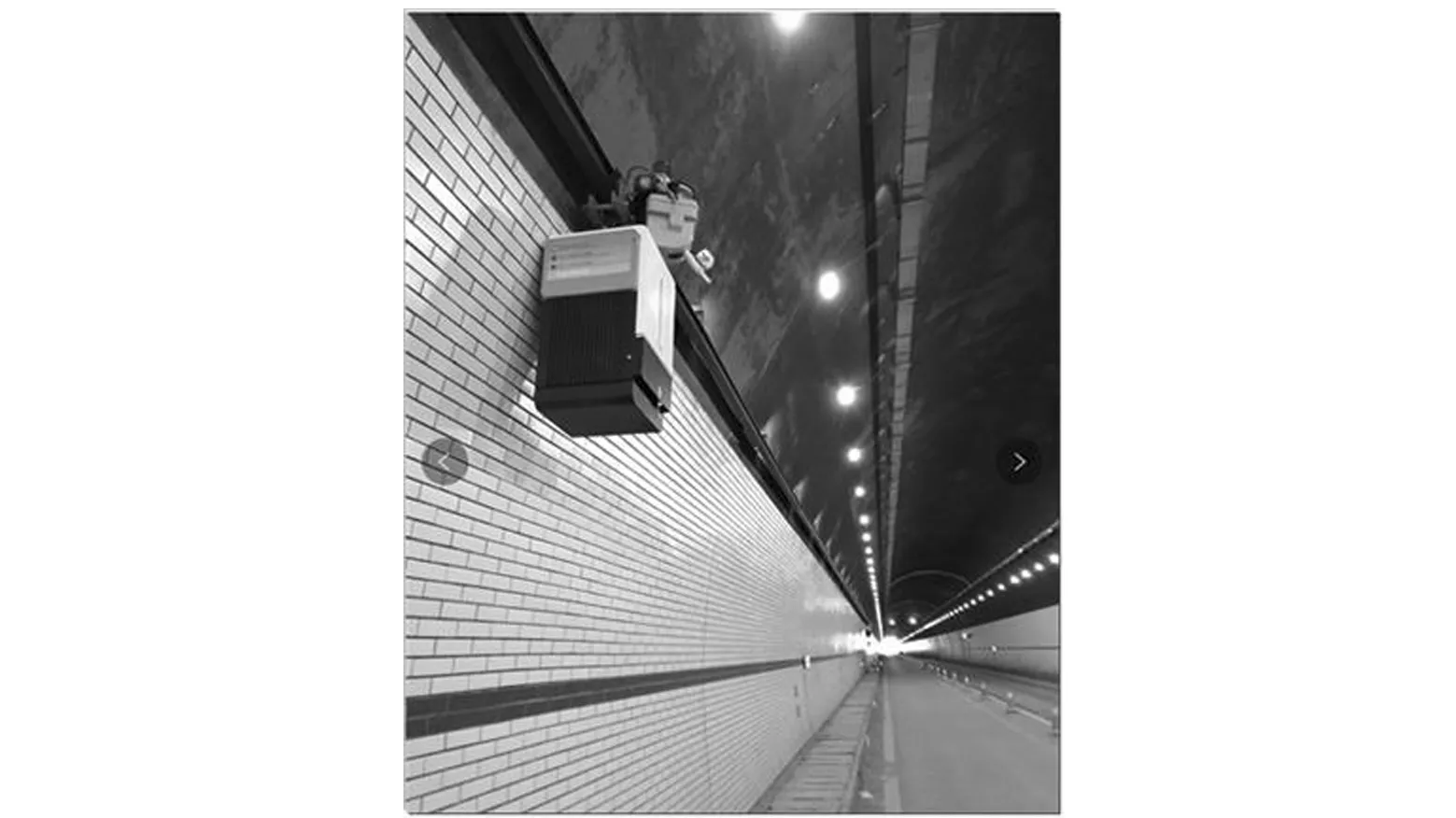
图2 机器人在隧道内的悬挂位置
1.2 隧道消防远程控制和监测系统
隧道消防远程控制和监测系统基于物联网,对灭火机器人进行控制并进行环境监测。相应的物联网框架由以下四部分组成:控制系统、监测系统、服务器云平台系统、个人电脑(Personal Computer,PC)端或手机端。物联网体系架构描述的是物联网各部分的关联关系,它是技术实施和系统实现的前提和基础。对隧道现场的环境监测过程可以描述为以隧道环境监测数据为主线的物联网基本架构(图3),即“物联感知层-数据传输层-分析处理层-应用服务层”。

图3 以隧道环境监测数据为主线的物联网基本架构
(1) 物联感知层:在隧道环境中,根据隧道内温度的变化实时感知火源情况。通过物联网接收隧道现场传感器、监控摄像头等感知设备反馈的数据,实现对整体环境监测要素的互联互感与数据采集,以确保对隧道环境多源信息的实时获取。
(2) 数据传输层:将隧道内环境数据、设备运行参数等上传到服务器,实现对隧道现场监测数据的稳定传输与运用。
(3) 分析处理层:针对信号强度低、存在遮挡与覆盖的隧道特殊环境,分析处理层能实时进行数据校验和平滑,及时跟踪数据的变化,并能在数据超出设定范围时中断对原始数据的采集。
(4) 应用服务层:利用监控设备提供隧道的实时全息数字化展示、可视化管理、环境实时监控等服务,在多种可视化终端上实现对隧道环境现场透明化、实时化和准确的管理与控制。
2 隧道消防远程控制和监测系统的运行
在隧道消防远程控制和监测系统中,用户客户端指电脑或手机浏览器;服务器包括隧道内的服务器和云端服务器;隧道客户端为灭火机器人及其搭载的温湿度传感器、摄像头等硬件设备。客户端-服务器-客户端结构如图4所示。
图4 客户端-服务器-客户端结构
现场设备之间的通信通过访问终端服务器的云平台来实现。灭火机器人搭载的温湿度传感器和摄像头用于检测及收集实时数据,并将数据通过服务器实时反馈给PC或手机客户端浏览器,从而达到在客户端上展示视频信息、发送控制命令以及进行远程操作的目的。
在监测过程中,现场检测系统通过所搭载温湿度传感器、摄像头等硬件设备,将现场数据实时传输给STM32F103开发板;开发板通过搭建的物联网框架将数据传输给用户客户端,并能通过网页端显示数据。数据传输层通过以太网传输数据,能够确保数据的安全性、完整性和准确性。
隧道消防远程控制和监测系统通过客户端来远程控制灭火机器人的运动。现场有多种设备,数据量庞大,应采取设定初值的方式进行数据采集,即所检测的温湿度数据达到一定限值时,系统应启用中断程序,自动发送一段已设置的指令,用以提醒操作人员手动操控隧道悬挂式轨道灭火机器人。当操作人员按下操作按钮时,客户端和服务器能够进行网络通信。客户端和服务器是通过写入Socket(它是一种底层链接)字节流进行通信的[7]。在操作人员按下操作按钮时,系统会利用所配备的设备将Socket指令发送到本地路由器,对本地路由器进行配置,并通过485总线传输用于控制机器人的行动指令,从而实现远程控制灭火机器人的移动和灭火动作。
本文整体系统的设计以Wifi模块作为通信模块。该模块的主要功能是将传感设备、控制设备和监测设备接入互联网[8]。采用AT(Attention)指令对Wifi模块进行的初始化实验证明,Wifi模块能够对数据进行双向传输。本文将网络调试助手的服务端用搭建的服务器取代,利用客户端浏览器发送相应的控制指令,并通过服务器向Wifi模块发送数据;通过Keil5将控制指令转化成控制电机驱动的程序,实现对电机的驱动,进而实现PC端或手机端对悬挂式轨道灭火机器人的远程控制。基于物联网搭建的灭火机器人控制系统的结构如图5所示。
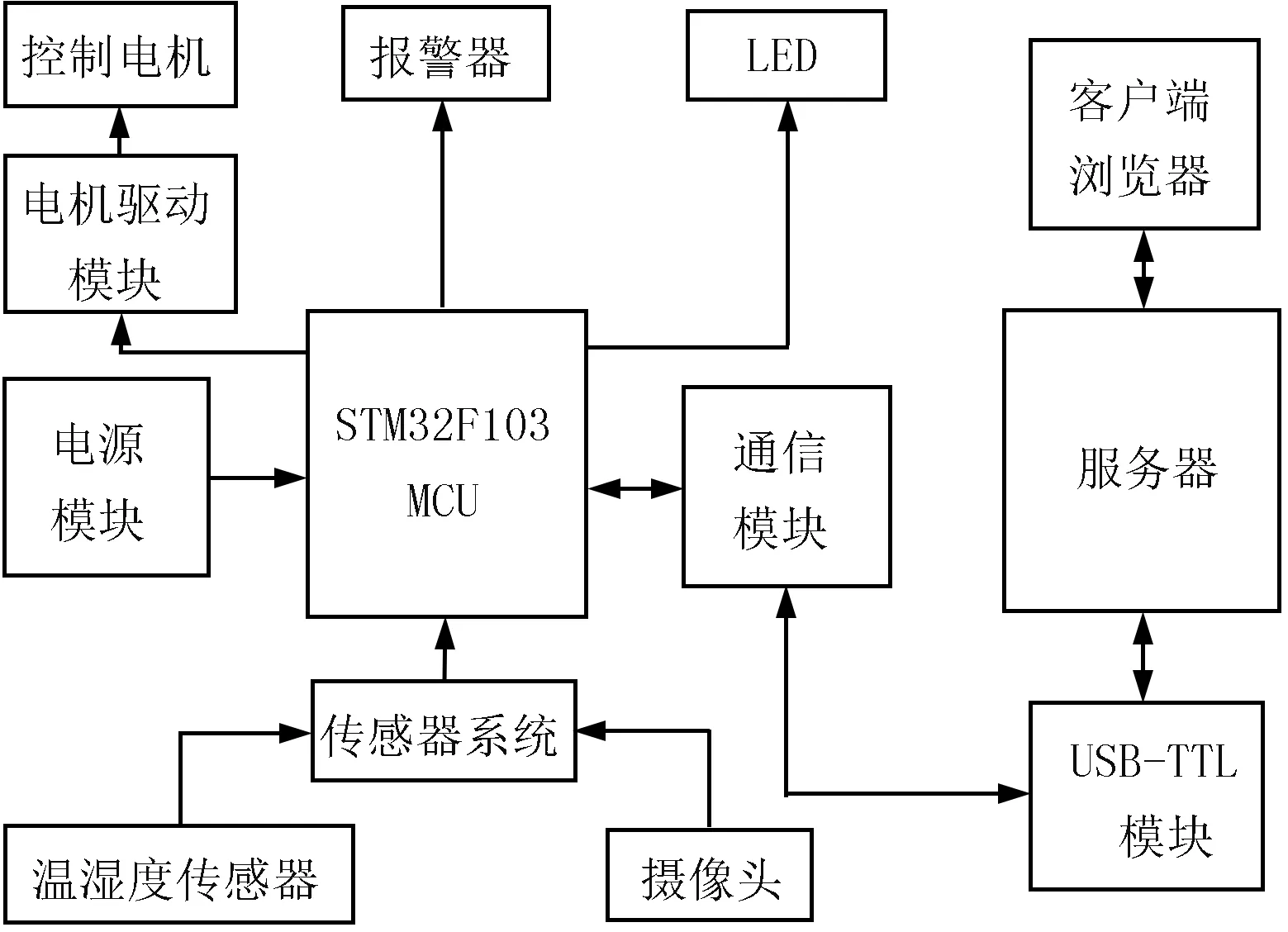
图5 灭火机器人控制系统的结构
物联网运行过程如图6所示。物联网设备的互联和通信非常重要。物联网系统需以无线通信方式收集和传输环境温湿度信息,而隧道失火情况不可预测,在预先分配各种火灾探测传感器的情况下,应对物联网通信路由进行优化,使物联网系统能有效、及时地接收网络数据。

图6 物联网运行过程
3 隧道悬挂式轨道灭火机器人的通信
3.1 通信实现
本文利用Java软件的Socket长链接技术实现客户端-服务器-客户端结构的通信,首先利用IDEA软件,以Tomcat打开Application Servers的方式启动服务器;然后输入浏览器的地址,显示远程调试助手界面;最后打开由上位机设置的串口调试助手,使串口调试助手通过上位机将参数设置成客户端模式。
完成基本的软件及硬件配置后,点击链接服务器按钮,通信系统通过Tomcat将以.jsp文件提交的信息传输给客户端,指定窗口显示“服务器启动、开始链接服务器、客户端向服务器发起链接、服务端收到客户端链接”。这说明客户端浏览器与搭建的服务器链接成功。此时,浏览器界面跳转到链接成功界面(该界面上有6个控制按钮和一个刷新界面按钮)。
3.2 通信实验
(1) 用网络调试助手设置好IP地址和端口号(与Java软件中设置的内容相同)。隧道环境监测需要将隧道环境数据传递到用户客户端,在通信实验时,可采用网络调试助手将一段数字如“1234”传输到服务器,若服务器的运行串口显示出客户端收到服务器返回的“1234”,则说明服务器返回成功。在数据传输到服务器后,服务器利用Socket长链接功能再将数据传递到Web的JSP(Java Server Pages)动态页面上[9],点击“0”刷新数据,数据“1234”就呈现在界面上,表明客户端与浏览器链接的模拟实验取得成功。
(2) 点击任意按钮,如点击“1”按键,并预设按键数据为“001”。客户端浏览器将数据传递给搭建的服务器,服务器界面显示“服务器:001”。在客户端收到服务器的返回数据“001”后,服务器通过以太网模块将数据传输到串口调试助手中。此时,客户端浏览器、搭建的服务器和串口调试助手会形成一个完整的系统。这证明软件与硬件STM32F103开发板的链接成功。实验中多次点击不同按钮,相应数据全部发送成功。
(3) 为说明JSP的典型应用,本文建立了JSP的运行环境(只需安装支持JSP的Web服务器或应用服务器即可),并以JSWDK12作为Web服务器。该服务器本身能支持JSP,不需另加JSP引擎。远程操控助手界面如图7所示。

图7 远程操控助手界面
(4) 在用Socket长链接功能在手机端或PC端实现服务器的启动以及远程控制时,本文首先利用JSP和HTML(Hyper Text Markup Language)编写制作网页界面,然后通过点击客户端按钮进行数据的无线传输,完成远程控制。相应的客户端控制界面如图8所示。利用手机端或PC端可以给Wifi模块发送相关的控制指令。实验中,设置的指令“1”为打开应急灯;“2”为关闭应急灯;“3”为打开报警器;“4”为关闭报警器;“5”为步进电机正转,灭火机器人向左移动;“6”为步进电机反转,灭火机器人向右移动;“7”为灭火机器人停止移动。至此,手机端或PC端利用物联网无线控制硬件的系统功能已基本实现。
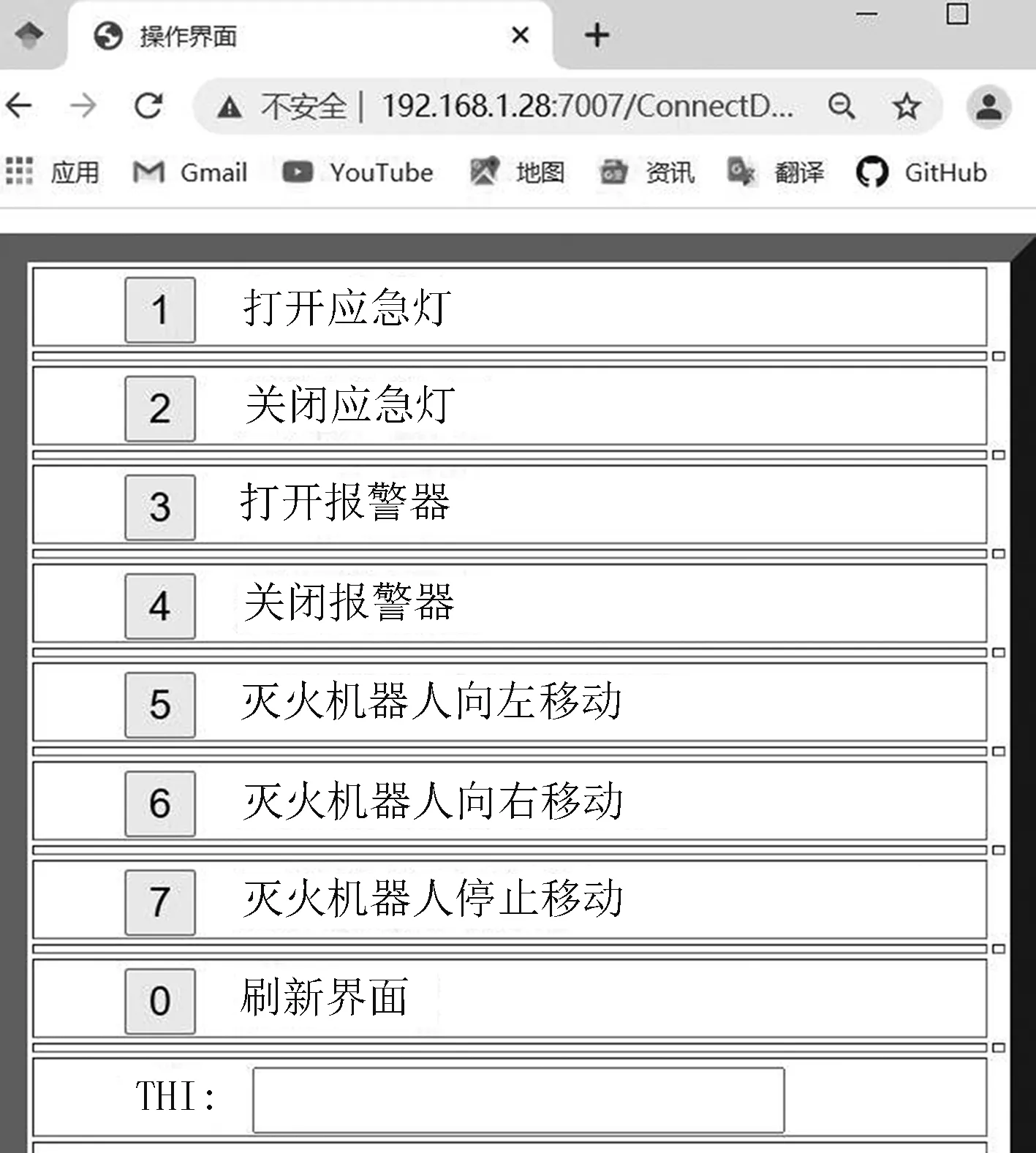
图8 客户端的控制界面
(5) 通过Java语言搭建服务器,利用Web和HTML制作系统的前端网页,并以Wifi模块实现数据和指令的无线传输。客户端以表单形式将数据和指令发送到服务器,服务器接收数据和指令并通过网络转串口形式将之传输到STM32F103开发板,开发板根据接收的信息向应急灯、报警器和步进电机发送控制指令,实现数据从客户端浏览器到服务器再到开发板的正向传输。在温湿度传感器将采集的数据通过Wifi模块发送到服务器后,服务器能根据相应的指令,把这些数据反馈到客户端浏览器,实现基于物联网对灭火机器人的控制。
(6) 为了测试所设计隧道悬挂式轨道灭火机器人远程控制和监测系统的性能,本文首先启动系统的服务器,进入登录界面;然后输入账号、密码和选定区域的名称;再点击链接服务器按钮;最后,服务器会收到相应的消息,指定窗口中显示服务器已收到客户端链接内容,数据接收成功。这说明系统通过手机端或PC端无线控制硬件的功能已经实现。
(7) 在验证系统对隧道内环境温湿度的监测功能时,首先链接服务器,然后打开隧道悬挂式轨道灭火机器人远程控制和监测系统的监测界面,界面中THI(温湿度指数)位置会显示现场测试数据(温度:8 ℃,湿度:60%)。若对现场温湿度数据进行持续观察,并尝试改变现场的温湿度,则温度和湿度数据会及时地被返给服务器,同时,服务器能成功地通过指定界面实时接收并显示现场数据(图9)。
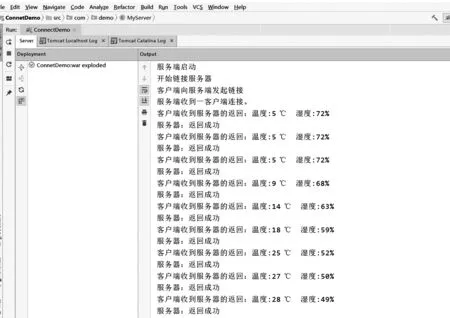
图9 服务器通过指定界面接收并显示的现场返回温湿度数据
4 结束语
本文设计的隧道悬挂式轨道灭火机器人远程控制和监测系统,不仅实现了对灭火机器人运行状态的多参数实时监测,而且实现了利用客户端对机器人的远程控制。本文方法融合了机器人技术、物联网和计算机软件开发技术,通过实验证明了所设计系统在隧道灭火中的实用性。
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
英语文摘(2021年11期)2021-12-31 03:25:18
装备制造技术(2021年5期)2021-08-14 01:45:00
漳州职业技术学院学报(2019年1期)2019-11-16 08:46:00
学生天地(2018年19期)2018-09-07 07:06:30
电子制作(2018年11期)2018-08-04 03:26:02
传媒评论(2018年4期)2018-06-27 08:20:24
传媒评论(2018年4期)2018-06-27 08:20:16
电子测试(2018年10期)2018-06-26 05:53:34
西安工程大学学报(2016年6期)2017-01-15 14:08:35