
船舶交流电网绝缘监测及故障定位系统开发
2021-02-10 11:26陈松涛王之民
江苏船舶 2021年6期
陈松涛,王之民
(镇江赛尔尼柯自动化有限公司,江苏 镇江 212000)
0 引言
随着船舶工业的不断发展,智能船舶、智能机舱等先进理念不断在船舶领域应用,同时也对现代船舶电气系统提出更高的要求。由于船舶常在高盐高湿环境下工作,船舶电力系统绝缘层故障发生率较高,因此为了船舶的安全运行,研究一种能够实时监测船舶电网绝缘状态并及时进行故障定位的系统十分必要。
陈姗姗[1]研究了基于DSP的在线监测系统装置;周方俊等[2]提出了中点接地直流供电网的高压直流电网绝缘三电压法的2种改进方法,并用PSCAD/EMTDC软件对结果进行了仿真;许明华[3]提出了船舶三相三线绝缘监控系统的自动查找电网绝缘故障的方法;王勇[4]提出了DSP+ARM的硬件设计方案。
以上方法虽在某种程度上解决了绝缘监测系统的问题,但仍存在受泄漏电容的影响较大、测量范围较窄和故障定位不易查找等缺点。为此,本文设计一种绝缘监测装置,向船舶电网电缆导体上注入某一特定频率的交流电压,利用软硬件滤波算法等技术测量出等效接地点相应频率响应电流,计算出电网绝缘等效阻抗即系统的等效绝缘电阻和系统对地泄漏电容等,并通过安装在不同回路的环形互感器检测获取与绝缘监测装置注入信号成正比的信号,最终通过综合分析比较可实现对故障回路的快速自动定位。
1 交流电网绝缘检测及故障定位系统组成
在传统船舶电力系统中,普遍使用中性点不接地方式来减小电力系统接地短路时的过载电流,使系统三相电力保持平衡,从而保证系统的安全,并保持系统供电的稳定性与持续性。但是,一旦出现了电力系统绝缘层短路故障,定位只能通过人工对系统负载电缆进行排除,这样大大增加了短路排除时间,又有很大的安全隐患。同时,随着船舶体积增大,电力系统供电容量也迅速扩大,电路越加复杂,就更加增加了排查故障的时间,因此中性点不接地已经越来越不能满足现代船舶的安全要求。
现代常用的船舶绝缘监测技术主要有4种:直流叠加绝缘监测法、S注入监测法、双频信号监测法和零序电流监测法[5]。本文对注入信号智能监测船舶电网系统绝缘状态和基于截取信号的船舶电网系统智能故障定位方法进行研究。
图1为船舶电网系统智能绝缘监测及故障定位系统,包括单片机控制器、LCD液晶显示单元、采集单元、信号注入单元、通讯单元、报警单元、按键单元、电源单元。各单元均与单片机控制器相连接,由单片机控制信号注入单元向被监测电网系统注入低频信号,经过采集单元进行采集处理分析,再通过通讯单元进行传输,由采集单元利用高精度漏电流互感器与采集电路进行信号采集与变换,同时进行放大及滤波算法处理分析,从而判断出被监测电网系统各支路对地绝缘状态,最后由报警指示单元进行报警指示。
通讯单元包括CAN通讯总线、RS485通讯。单片机控制器与绝缘监测通讯单元之间通过CAN通讯总线进行通讯连接,单片机控制器与上位机或上级模块通讯单元之间通过RS485通讯进行通讯连接。RS485通讯总线最长可以达到1 200 m,CAN通讯总线距离达200 m。为适应远距离传输要求,还可以在通讯单元设置多个CAN通讯总线。多个CAN通讯总线之间通过中继器进行转接以提升通讯距离。
单片机控制器同时设置1个信号注入单元、8个采集单元。1个信号注入单元连接在被监测船舶电网系统的任意两相总线与接地点之间,8个采集单元分别连接至被监控船舶电网系统8条支路的每个高精度漏电流互感器。被监控船舶电网系统支路的高精度漏电流互感器为开口式高精度漏电流互感器,分辨率为0.01 mA。注入线路包含了信号注入端口与信号采集端口,RN1、RL1分别为注入线路的限压电阻,L-S、N-S分别为2路信号采集端口,RN6、RL6分别为信号采集端的采样电阻。
2 智能绝缘状态系统
2.1 绝缘监测系统结构
绝缘监测系统向被监测电网的任意两相相线上分别注入0.25 Hz或0.15 Hz的低频交流信号,与电网故障等效接地点形成通路回路;通过采集流过回路的电压信号,运算放大处理后输送至单片机控制器进行软件算法处理,最终计算出电网对地绝缘状态,包括绝缘电阻值与泄漏电容值;利用测量电容值设定预警和报警阈值进行预警/报警,经由通讯单元连接至故障定位装置通讯单元、上位机或上级模块通讯单元。
2.2 绝缘监测系统工作流程
流过回路的电流信号经过采样电阻转换为电压信号。该电压采样信号经过双路一级电压跟随电路,其特性是电压放大倍数恒小于且接近于1,使得输出电压与输入电压是相同的,具有输入阻抗高、输出阻抗低的特点,从而起到缓冲、隔离、提高带载能力的作用。将电压跟随电路输出信号通过2级运算放大电路把微弱信号放大,将2路放大信号进行叠加处理送给单片机控制器,由单片机控制器进行软件算法编程,最终计算出电网对地绝缘状态,包括绝缘电阻值与泄漏电容值。
设注入信号频率为f时,母线的对地电压为Uf。当没有发生绝缘故障时流过线路的注入频率交流电流为In,其表达式为[6]
(1)

支路i发生接地短路故障或对地绝缘降低时,相当于在线路对地电容旁边并联了一个短路电阻R,其故障漏电流为Ii,其向量表达式为
(2)

通过比较式(1)、式(2)可发现,故障后电量的幅值将大于正常的电流。比较各线路的漏电流幅值,能够准确判断出故障线路,实现绝缘故障支路的故障定位。
在进行线路绝缘监测时,需要在线测量计算对地电阻R。注入单一频率信号时,可通过式(2)直接计算电阻R,且不受对地电容的影响。推导出故障线路的阻抗表达式为
(3)

将式(3)用实部、虚部形式表征可得:
(4)
(5)
求解式(4)、式(5),可得到此绝缘支路的对地电阻大小,从而实现注入单频信号f下对发生绝缘故障的支进行路在线电阻监测。
绝缘监测系统工作流程见图2。
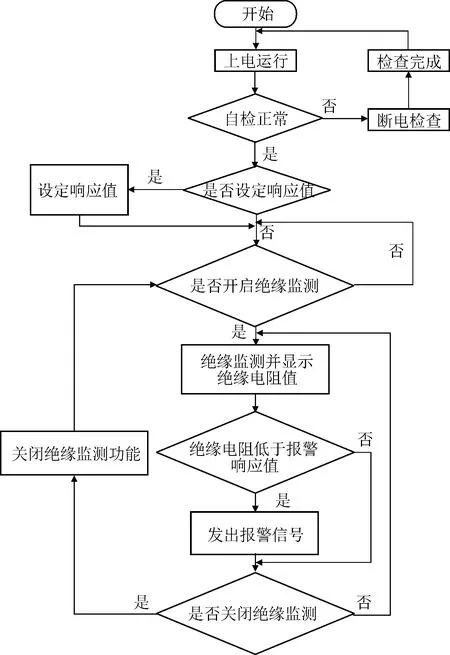
图2 绝缘监测系统工作流程图
当电网工频电源和注入低频信号源同时作用时,故障线路上流过的电流为工频电流和低频电流两者的叠加,叠加电流I为
I=Igsin(2πfgt+αg)+Ifsin(2πft+αf)
(6)
式中:Ig为发生接地故障时,故障支路上流过的工频电流;If为注入低频信号后,故障支路上流过的工频电流;fg为工频频率;t为时间;αg为低频信号注入时工频电流的初始相位角;αf为低频信号注入时低频电流的初始相位角。
通过式(6)可发现,漏电电流是周期函数,通过傅里叶级数计算,可以得到漏电流幅值。
3 智能故障定位系统
基于截取信号的船舶电网系统智能故障定位系统电路示意图见图3。图中,R1、R2为限压电阻,由2路开关切换配合控制截取电网峰值波形作为定位信号。该信号在故障支路绝缘电阻Rf上流过,产生微弱漏电流Id,由高精度漏电流互感器提取微弱信号,接入采集电路处理,最终由单片机控制器进行分析从而判断故障支路。采集单元输入端连接在被监控船舶电网系统支路的高精度漏电流互感器上,输出端连接至单片机控制器,实现微弱定位信号的采集处理,并由单片机控制器进行分析,作出是否为故障支路的判断。

L1、L2、L3—电网三相电源端;R1、R2—限压电阻;Rf—绝缘电阻;Id—微弱漏电源。
3.1 故障定位系统组成
由采集单元利用高精度漏电流互感器与采集电路进行信号采集与变换并进行放大及滤波算法处理分析,从而判断出被监测电网系统各支路对地绝缘状态并由报警指示单元进行报警指示,实现实时检测、准确识别故障支路,提升船舶电网及设备的工作安全连续性与可靠性;每一个智能故障定位装置可实现对8路负载支路在第一次发生故障时自动准确识别定位并及时进行检修。
CTA与GND为第1支路的高精度漏电流互感器接线端口,将微弱电流信号接入采集电路。采用基于针对微弱信号处理的TLC2652AI高精度放大器及低失调高开环增益的OP07运算放大器的组合电路,实现微弱定位信号的采集。调理信号送至单片机控制器ADC-IN0端口,并由软件算法处理进行分析,作出是否为故障支路的判断,其余7个支路依次进行轮询处理。
3.2 故障定位系统工作过程
船舶电网系统智能故障定位装置,由信号注入单元向被监测电网系统与地之间注入高幅值低有效值的定位电压信号,与电网故障等效接地点形成通路回路。该电压信号取自电网系统本身,可避免增加额外注入装置并提升抗干扰能力。由采集单元利用高精度漏电流互感器与采集电路进行信号采集与变换并进行放大及滤波算法处理分析,从而判断出被监测电网系统各支路对地绝缘状态并由报警指示单元进行报警指示。其作用是将报警信息传输给绝缘监测装置、触摸屏或上位机系统。每一个智能故障定位装置可实现对各路负载支路在第一次发生故障时自动准确识别定位并及时进行检修。
故障定位子系统工作流程图见图4。
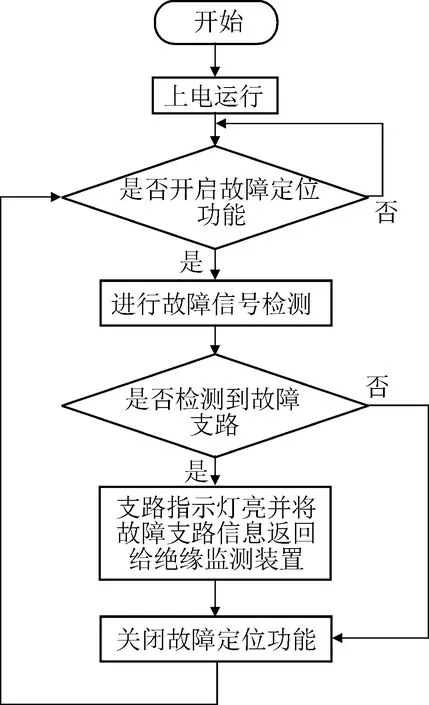
图4 故障定位流程图
容错算法采用Hausdorff算法测量比较波形距离,计算公式为
H(A,B)=max(h(A,B),h(B,A))
(7)
h(A,B)=maxmin||a-b||
(8)
h(B,A)=maxmin||b-a||
(9)
式中:A、B为2个有限点集;H(A,B)为A、B点集之间的Hausdorff距离;h(A,B)为点集A到点集B的有向Hausdorff距离;h(B,A) 为点集B到点集A的有向Hausdorff距离;a、b为相邻2个测量支路高精度漏电流互感器的波形幅值经过多次采样得到的系列值。
计算出n个最小值的最大值即单向Hausdorff距离h(A,B)和h(B,A)。确定相邻两测量支路匹配度系数Hs[Hs=(1-H)],即判断相邻两支路波形幅值的差异性,设定阈值。如果超出阈值则舍弃此次测量,否则认可,从而排除错误信号。
4 结论
(1)利用通信单元和单片机连接绝缘监测及故障定位系统与上位机,使得数据快速传输。
(2)通过单片机计算注入法监测系统的绝缘电阻值与泄漏电容值,体现系统智能化功能。
(3)采用Hausdorff容错算法,设定阈值对故障定位系统进行优化,提高故障定位精度。
在实际应用中,系统排除了泄漏电容的影响,提高了测量范围,减轻了故障排除的劳动力且节约时间,体积小、重量轻,安装灵活,维护方便,运行可靠。
猜你喜欢
科技视界(2022年22期)2022-11-10
汽车实用技术(2022年7期)2022-04-20
发明与创新·中学生(2020年3期)2020-04-13
电机与控制学报(2018年9期)2018-05-14
新课程·中旬(2017年7期)2017-08-13
科技与创新(2017年7期)2017-05-13
发明与创新·中学生(2017年4期)2017-03-31
科技与创新(2016年16期)2016-09-23
哈尔滨理工大学学报(2016年2期)2016-09-12
中学生数理化·高二版(2016年5期)2016-05-14
