
气垫式调压室控制阈值整定方法研究
2021-02-04 06:16欧传奇,刘德有,,周领
人民长江 2021年1期
欧 传 奇,刘 德 有,,周 领
(1.国际小水电中心,浙江 杭州 310002; 2.河海大学 水利水电学院,江苏 南京 210098)
1 研究背景
气垫式调压室多采用“等P0·V0值”模式控制(P0,V0分别为稳定运行时室内气体绝对压力、气体体积)。在恒温闭气条件下,该模式可自适应工况转换,而无需进行补气、排气。不过受工程地质、防渗、施工条件等限制,气室漏气不可避免[1-3],室内温度也不可能完全遵循等温过程[1,4]。为控制好室内水位及气压,确保电站安全运行,需在其运行控制系统中设置补气、排气、报警、紧急停机等操作的系列参数控制阈值,即气垫式调压室控制阈值,简称:气室控制阈值。鉴于大体积高压气体的存在,准确整定气室控制阈值尤为重要,据悉挪威Kvilldal电站12.5万m3气垫式调压室的爆炸力相当于约200 t TNT炸药[5],一旦失事则后果不堪设想。
关于气室控制阈值整定,国外(以挪威为主)因相关工程地质条件好,漏气量小(普遍在100 Nm3/h以内),一般仅需按设定水位进行补气、排气,故对此并未重视,其控制参数选取单一,阈值整定较为粗糙[6],可借鉴的经验不多。我国自然地质条件与挪威差异较大,从实际应用来看,漏气较为普遍(自一里1 800~2 400 Nm3/h,小天都900~1 200 Nm3/h)[7],在改善渗漏条件的同时,研究合理的运行控制模式及补气、排气阈值整定方法对促进我国气垫式调压室的发展具有重要意义。在这方面,刘德有等[8]针对我国第一座气垫式调压室,给出了最大、最小P0·V0值取值工况和简单的运行控制建议。因该调压室为地面全钢包式,漏气量很小,室内压力也低,不具有代表性。薛志刚等[9]给出了“等P0·V0值”模式稳态气室常数的取值方法及范围建议,但并未涉及更多的补气、排气控制阈值整定内容。刘九等[10]较为完整地给出了野三河工程的相关阈值和参数测量方法,但并未给出各项阈值确定的依据,而且针对的是等面积体型,未提及对其他体型的适用性。本文基于通用的体型关系式,通过分析相关控制阈值的动静态变化范围及其叠加识别方法,给出适合各类体型控制阈值确定的一般方法与原则。
2 “等P0·V0值”模式与控制参数选择
2.1 “等P0·V0值”模式特征及参数优选
采用这种模式,需要确定合理的“P0·V0值”,即气室的初始充气量,习惯称之为气室控制常数,记作CT0。对于“等面积”体型,常将其除以断面面积后的“P0·L0”值作为气室控制常数(L0为室内气垫按相应断面折算后的高度)。
CT0值与取值工况的选择无关,为方便设计计算,习惯选为“上库发电最高水位、全厂停机工况”,并称此为气室设计静态工况。给定该工况室内水位,可按式(1)求得CT0值:
(1)
式中:Ls0为设计静态工况室内水深,m;Zb为调压室底板高程,m;P0为设计静态工况室内气体绝对压力,m;Zumax为发电最高库水位,m;ha为当地大气压,m;V0为设计静态工况室内气体体积,与相应室内水深具有线性或近似线性关系,m3;k1,k2为由气垫式调压室体型确定的体积系数,等面积体型k1为调压室断面面积,k2为调压室总折算高度;非等面积体型,可由波动范围内两组数据点确定。
当已知CT0值及相应室内水深Ls0后,任意稳定工况i的室内水位、气体绝对压力及气体体积等初始参数均可由式(2)确定。
(2)
式中:b,c,k3为计算系数。
为了确保气垫式调压室的长期安全可靠运行,尽可能地减少补气操作,CT0取“满足最小安全水深要求并预留一定安全裕度的较大值”[9]。
2.2 运行控制参数选择
采用“等P0·V0值”模式,各参数相互关联,只要控制CT0值在合理范围内就能保证电站安全稳定运行,因此CT0是重要的控制对象。由于CT0是通过测量气室压力P和水气差压(测量出室内水深进而计算出气体体积V)经计算间接获取的,仅与稳态值相匹配,大波动过渡过程中的动态值将发生改变。为此需选取PV值作为控制参数,记CT=P·V,称CT为气室控制参数,并取室内水位Z(或水深Ls)、气体压力P作为辅助控制参数,以策安全。
3 CT值变化范围研究
允许CT0在一定范围内变化,有助于减少运行费用和简化控制程序。允许变化范围由CT值稳态变化范围与CT值动态变化范围共同决定。其中,稳态变化由气体漏损等因素引起,其设计值为CT0;动态变化由水力瞬变引起,动态变化过程以稳态值为初值,围绕其上下波动最终稳定至漏气后的新的稳态值。
3.1 稳态CT值的变化范围
气垫式调压室深埋地下,室内温度基本不受季节变化影响(实测约在2 ℃以内[1]),对主要参数控制值影响有限,因此引起稳态CT值变化的主要因素是气体漏损。根据工程设计控制要求,正常情况下室内气体漏损极其缓慢,则CT值稳态变化可视为符合等温规律的若干CT0值的叠加,可参照式(1)求得。
CT0=k1(k3-Ls0)(k2-Ls0)
(3)
稳态CT值是静态工况室内水深Ls0的二次函数,其最大水深偏离对称轴约0.5P0,在水位可能波动范围内,两者实际近似成线性关系。
稳态CT值允许变化范围需经水力过渡过程计算和稳定分析确定。研究表明[4,9]:随着漏气量的增加,设计工况静态工况水深逐渐增加,稳态CT值降低,使得气垫式调压室稳定气体体积安全系数降低、而室内最大气压及蜗壳进口最大内水压力增大。因此,CT0值下界由稳定条件和压力参数控制要求(气室最大压力及蜗壳进口最大内水压力等)决定;反之,随着设计工况静态工况水深逐渐减小,稳态CT值增加,气垫式调压室最小安全水深逐渐降低,CT0的上界由最小安全水深要求决定。由此根据式(4)可以确定稳态CT值的变化范围(见图1)。
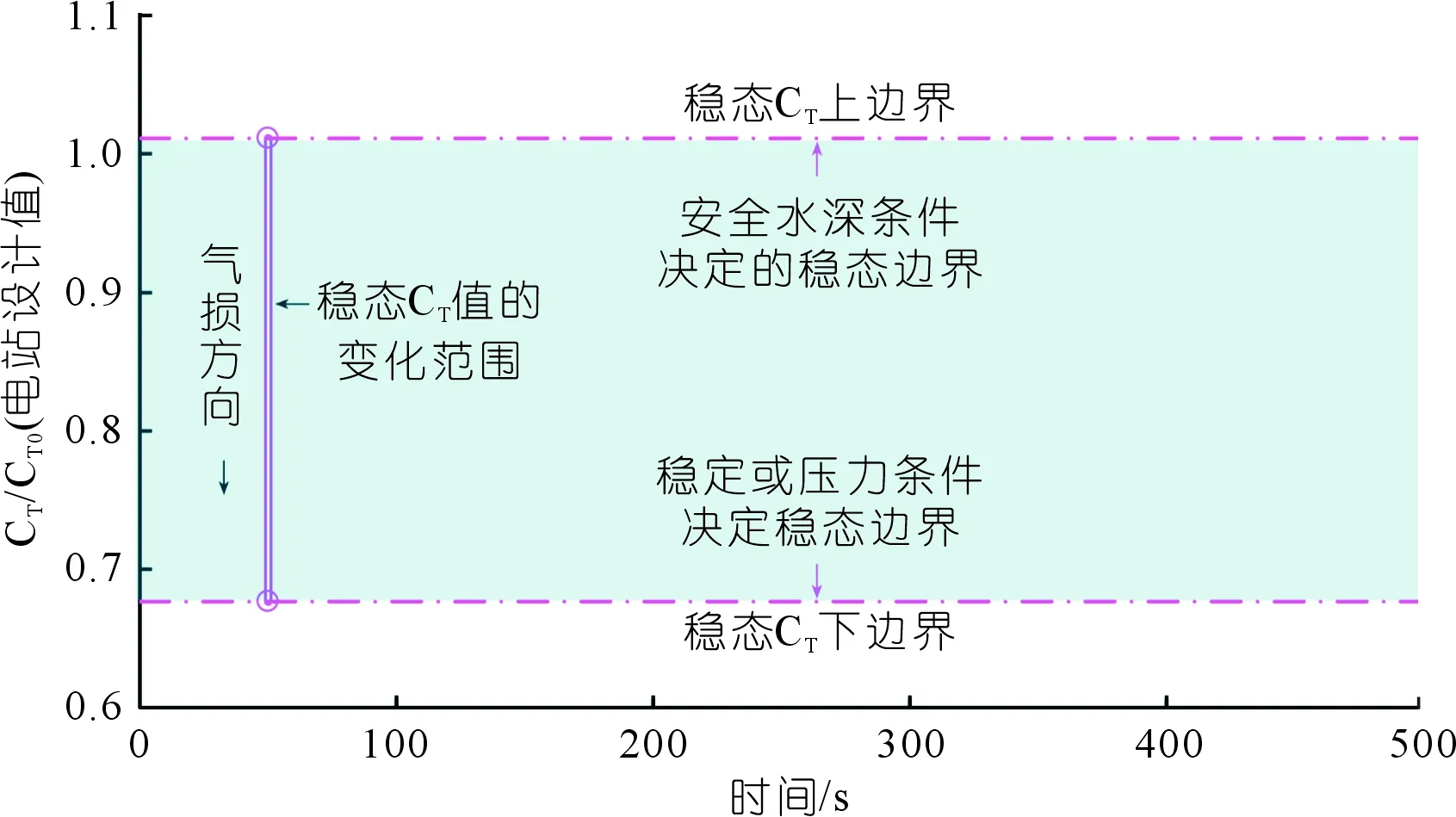
图1 稳态CT值变化范围示意Fig.1 Change range of steady-state CT value
3.2 动态CT值及其动态变化
快速的水力瞬变过程致使室内气体传热不充分的温度变化,是引起动态CT值变化的主要原因。CT值的动态变化以稳态CT值为初值,对应稳态CT值范围内的每个CT值均有一组最大动态波动曲线,由此叠加成一个更大的变化区间(见图2)。动态变化下限由以稳态变化下限为初值的最大波动曲线的最小值决定(其最大值决定对稳态变化下限的扰动范围),动态变化上限由以稳态变化上限为初值的最大波动曲线的最大值决定(其最小值决定对稳态变化上限的扰动范围)。相对稳态值的增加范围可由下式进行估算:
(6)
式中:m为气体多变指数。
受高压气垫限制,体积变化率不会太大,取±0.25估算,气体多变指数按最不利情况取m=1.4,则CT动态变幅约为稳态的10%,既不可忽略也不太大,且随着气体漏损波幅逐渐减小(见图2)。

图2 动态CT值变化范围示意Fig.2 Dynamic CT value range
3.3 CT变化范围分区及补排气要求
由稳态、动态变化范围的上下限可将允许的CT变化范围分为7个区域(见图3)。其中,稳态变化下限(对应室内最大初始水深)由稳定条件及压力控制要求共同决定;稳态变化上限(对应室内最小初始水深)由最小安全水深控制要求决定;动态变化下限由以稳态变化下限为初值的最大波动曲线的最小值决定,动态变化上限由以稳态变化上限为初值的最大波动曲线的最大值决定。显而易见:
(1)区域1为安全不控区域。即当CT在区域1内时,不论CT值为稳态值还是动态值,均能满足设计要求,无须进行补排气动作。
(2) 区域6和区域7为不安全严控区域。即当CT在该区域内时,无论CT值为稳态值还是动态值,均表明危险已发生,是绝不允许的。
(3) 区域2和区域4为动态值不允许控制区域。当CT在该区域内时,存在动态参数干扰的可能,若CT值为稳态值是安全的,若为动态值则是危险的,位于区域2时需考虑排气,位于区域4时则需考虑补气。

图3 CT值的可能变化范围的分区Fig.3 Division of possible change range of CT value
(4)区域3和区域5为静态值不允许控制区域。当CT在该区域内时,存在动态参数干扰的可能,若CT值为动态值是安全的,若为稳态值则是危险的,位于区域3时需考虑排气,位于区域5时则需考虑补气。
4 CT值阈值整定方法
4.1 补气和排气控制阈值整定方法与原则
补气是为了恢复CT0值,其阈值应按控制参数的稳态值设置,且因气体漏损相对缓慢(自一里总高度12 m的气室内设计水深从4 m上升至5 m的时间约为2 a[7]),稳态CT值可调范围较大,可放低对控制阈值信号的实时性和精度要求。对于排气,除输水系统放空检修外,正常情况是不必要的,若发生即属非正常情况,因此排气阈值应按控制参数的动态值设置,且应具备良好的实时性。为使补气平稳、排气顺畅,并减少设备投入频次、方便其轮回检修维护、提高系统整体安全性,设置工作、备用补气空压机各一台并自动定时切换,设置工作、备用排气阀各一只并自动定时切换。空压机所有的自动控制由现地控制单元控制,所有控制阈值、报警、亮灯等故障信号及空压机工作状况均应上传至梯调中心[10]。以此为前提,确定补排气控制阈值选取原则如下。
4.1.1补气空压机动作及控制阈值选取原则
(1) 以维持电站实际运行靠近设计值且不受动态参数影响设置补气工作空压机启动阈值。补气工作空压机投入早,可缩小CT值偏离设计值CT0的距离,维持电站长时间在设计值附近运行,但增加了补气工作空压机启停频次;补气工作空压机投入迟,则实际运行偏离设计值较大、连续补气时间较长,降低了管道最大压力等主要设计控制参数的安全裕度。考虑实际工程中漏气速率较为缓慢,可在越过区域2后,在靠近区域1上边界附近选取控制阈值(一般对应设计工况水深上升约0.3~0.5 m)。工作空压机投入时亮工作信号灯以明示。
(2) 根据事态进一步发展及视电站特征、危险概率设置备用空压机启动阈值。当CT值降至区域4内时,发生动态值时触发危险,对于常规电站,因其工况转换少,停机或稳定运行(包括小扰动)是大概率,触发危险的概率小,可暂不开启备用空压机,视CT值进一步变化再做决定;而抽水蓄能电站工况转换频繁,发生危险情况概率大,需开启备用空压机补气,视CT值进一步变化而作是否停机的决定。当CT值持续降至区域5内时,发生稳态值时触发危险,此时常规电站应开启备用空压机补气,不论常规电站还是抽水蓄能电站均应亮紧急信号灯、报警并发出停机信号。
(3) 以维持电站实际运行大概率在设计值附近设置充气及补气空压机停机阈值。除遇事故情况外,取气室控制常数CT0作为所有充气、补气空压机停机阈值。初期充气时,可手动开启充气空压机,连续充气使CT值达到设计值CT0后即自动停机。为防止动态信号干扰引起的过补(超出区域2进入区域3,充气情况不存在),初始充气或补气至CT0附近时,可在进入区域2后通过逐渐关闭补气空压机减小补气速率予以控制。
4.1.2排气阀动作及控制阈值选取原则
(1) 依据设计、校核最小水深设置工作和备用排气阀启动阈值。排气采用水深等参数作为控制参数,在保证电站安全的情况下,以尽量减少空压机运行概率为原则,设定工作排气阀投入条件。当调压室水位下降至设计工况允许的最低水位值(对应室内最小水深不小于2.0 m的设计要求)或压力已达到最小值时,打开工作排气阀进行排气,亮工作信号灯。当调压室水位下降至电站所有工况允许的最低水位(对应室内最小水深不小于1.5 m的校核要求)或CT值、气室压力值达到按过渡过程确定的最大值时,打开备用排气阀排气,亮紧急信号灯、报警并发出停机指令。
(2) 在确保安全的前提下以避免过排设置排气阀关闭阈值。过渡排放会增加再次投入运行时补气量。通常在确保停机的情况下,排气至区域1上边界即可。
(3) 按照温控要求控制好调压室放空检修排气速率。调压室放空检修时排气速率过快,则气室温度可能骤然降低至冰点以下[11],使调压室水体冻结,监测设备及结构物遭受破坏。宜设置测温系统,配合工作。
4.1.3补气和排气空压机的自动运行阈值整定
根据上述原则结合实际工程运行控制经验,可将补、排气空压机的自动运行阈值整定如下:
(1) 初期充气时,手动开启充气空压机,连续充气使CT值达到设计值CT0后即自动停机。
(2) 当CT值至区域2降至区域1往下的某一整数值时(对应设计工况水深上升约0.3~0.5 m),启动工作空压机补气,同时亮工作信号灯。
(3) 当调压室内CT值降至区域4内时,抽水蓄能电站启动备用空压机补气。当调压室内CT值继续降至区域5内时,常规电站启动备用空压机补气,不论常规电站还是抽水蓄能电站均应亮紧急信号灯、报警并发出停机信号。
(4) 当调压室内CT值大于CT0设计值,且气压上升至过渡过程计算所允许的室内最高气压值(简称事故高压值)时,开启排气阀进行排气并报警。
(5) 当调压室内水位下降至事故低水位值时,事故低液位报警,开启备用排气阀进行排气,同时停发电机组。
4.2 CT值状态识别及其对阈值整定的改进作用
如前所述,真正需要控制的是稳态CT值的变化。若实际量测系统不能准确地识别系统所处的运行状态,则无法区分CT值波动是由工况变化引起的(不需要补气)还是由气体损耗所引起的(需要补气)。为了确保电站安全稳定运行,对于某些不需要气和补排气的情况同样操作了补排气设备,甚至还发出了停机信号,这样势必会给运行控制带来麻烦和增加运行控制成本。识别系统运行状态的方法主要有如下几种:
(1) 关联引起水力瞬变的控制信号。因气垫式调压室布置一般靠近厂房,将其控制系统整合至电站中控室,可将机组、闸门或阀门等设施的动作信号与调压室补气和排气设施的运行控制相关联,据此进行识别。该方法具有准确、快速的特征,但可能会增加线路长度和设施成本。
(2) 通过实时测量并绘制相关参数过程线进行判断。实际工程中,气垫式调压室多采取了防渗漏措施(如水幕、钢包),密闭性总体较好,短时间内不会产生危险的漏气量(一般小于40 Nm3/min,需要1~2个月甚至更长的时间才需要补气一次),而调压室相关参数波动周期大约只有几分钟。因此,通过实时测量并绘制室内压力、水深、CT值等某一参数的过程线,只需约1/4个周期即可识别系统的运行状态。需先行估算控制滞后造成的漏气量是否被运行,估算公式可参考Tokheim等提出的经验公式[12]。其中,调压室的周期可通过下式进行估算(m取1.4):

(7)
式中:T为调压室周期,s;L,f为输水道长度、断面面积;其他符号意义同前。
(3) 通过气体多变数值变化情况进行判断。由于引起CT值动态变化的根源在于气体热力学的非等温过程,则不论短时段内室内其他参数变化量有多小,只要发生引起CT值不可忽略的过渡过程,则气体多变指数m值必然与1有显著差别,并可取连续取多组有效测量数据按下式计算得出:
(8)
数据时间间隔应考虑两点数据变化的可识别度并参考波动周期进行选择(建议不小于2~5 s),并应首先判断两点数据是否十分接近。
(4) 采用数学算法进行分析判断。这些数学识别算法包括主元分析、聚类算法、动态交互信息算法[13-16]等,具有精度高、速度快的特点,需要设计专门的识别器。
采取状态识别措施后,运行控制只需关注稳态值,在气室控制常数CT0允许的上下限附近,按照一定水深等差设置工作、备用排气阀和补气空压机的先后投入的控制阈值。
5 结 论
受漏气及季节性温度变化等影响,采用“等P0·V0值”运行控制模式时,仍需要进行补、排气操作。经研究分析,本文可以得出如下主要结论。
(1) 运行控制中,一般选取CT(CT=P·V)作为控制参数,并采用室内水位(室内水深)、气体压力作为辅助控制参数。需控制的是稳态CT值,但其受动态CT值的干扰。允许的CT值变化范围由CT值稳态变化范围与CT值动态变化范围共同决定,可分区对各阈值进行整定:① 对于稳态CT值下界,由稳定条件和压力参数控制要求决定,上界由气垫式调压室最小安全水深要求决定。设计值即为气室控制常数CT0,按照满足最小安全水深并尽量减小管道内的水锤压力的原则,靠近上边界取值。② 对于动态CT值下限,由以稳态变化下限为初值的最大波动曲线的最小值决定,上限由以稳态变化上限为初值的最大波动曲线的最大值决定。
(2) 补气控制阈值信号的实时性和精度要求低,可按控制参数的稳态值设置。分区进行阈值整定时,应以维持电站实际运行靠近设计值且不受动态参数影响设置补气工作空压机启动阈值,并根据事态进一步发展及视电站特征、危险概率设置备用空压机启动阈值,以维持电站实际运行大概率在设计值附近设置充气及补气空压机停机阈值。
(3) 排气控制阈值实时性要求高,应按控制参数的动态值设置。分区进行阈值整定时,应依据设计、校核最小水深设置工作和备用排气阀启动阈值,在确保安全的前提下以避免过排设置排气阀关闭阈值。放空检修时还需按照温控要求控制好调压室排气速率。
(4) 识别系统运行状态,消除动态CT值干扰,可减少不必要的补排气动作。可取方法包括:① 关联引起水力瞬变的控制信号;② 通过实时测量并绘制相关参数过程线进行判断;③ 通过气体多变数值变化情况进行判断;④ 采用数学算法进行分析判断等方法进行识别。采取状态识别措施后,运行控制只需关注稳态值,可免去对动态参数的计算分析,在气室控制常数CT0允许的上下限附近,按照一定水深等差设置工作、备用排气阀和补气空压机的控制阈值,极大地方便设计和运行控制。
猜你喜欢
东北水利水电(2022年10期)2022-10-24
水资源与水工程学报(2021年2期)2021-07-06
河海大学学报(自然科学版)(2021年2期)2021-04-15
水资源与水工程学报(2019年4期)2019-09-23
汽车零部件(2019年5期)2019-06-13
北京航空航天大学学报(2018年1期)2018-04-20
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
橡胶工业(2015年10期)2015-08-01
