
袋装水泥自动双向分流转向溜槽设计与仿真分析
2021-02-04 08:09:50王观民张宏洲周晓光朱萌程明峰
水泥技术 2021年1期
王观民,张宏洲,周晓光,朱萌,程明峰
1 引言
传统的袋装水泥装车大多采用半自动化方式,依赖人工进行最后的码垛装车。这种方式在装车过程中容易产生大量的粉尘,对工人的身体健康有危害,其工作效率也较低。
目前国际上专业的装车方式是利用袋装水泥自动装车机器人进行装车,这种方式装车最快速度可达3 000 包/h[1],按每包水泥重50kg 计,装车能力为150t/h,工作效率较高。袋装水泥自动装车机器人工作中采用两个抓手交替装车,需要将主皮带机输送过来的袋装水泥按要求分别分流给两个抓手。为了满足此要求,我们配套设计了一种袋装水泥自动双向分流转向溜槽装置,实现了袋装水泥装车全自动化,同时也满足了3 000包/h水泥的装车速度。
2 袋装水泥自动双向分流转向溜槽装置结构设计
袋装水泥自动双向分流转向溜槽装置的作用主要是完成袋装水泥的快速分流。在该设备的总体结构设计中,主要是根据水泥生产工况和装载要求,重点考虑其实用性和可靠性。设备各部分的设计及元器件的选用等都遵循实用性和可靠性原则,确保装置的正常工作,同时也保证其具有良好的经济性和可维护性[2]。
袋装水泥自动双向分流转向溜槽装置的结构设计如图1所示。该装置是在线式袋装水泥自动装车机器人的起始部件,信号连接于机器人总控制器,与袋装水泥输送主皮带机转弯溜子的设置相对应。
皮带机来料接口板与袋装水泥输送主皮带机上转弯溜子出料端对接设置,固定溜槽向下倾斜设置在皮带机来料接口板外侧,接料随动滚轴设置在皮带机来料接口板和固定溜槽连接处。
导向护板包括固定护板和弧形护板,固定护板设置在皮带机来料接口板一侧,弧形护板设置在与固定护板相对一侧的固定溜槽侧边上。左转向溜槽和右转向溜槽分别倾斜设置在固定溜槽末端左、右两侧,左转向溜槽和右转向溜槽中部均设置有凸起的弧形过渡结构。左摆动溜槽和右摆动溜槽均通过中间随动滚轴分别与左转向溜槽和右转向溜槽连接,扭簧分别设置在连接处两侧的下方,在左摆动溜槽和右摆动溜槽旋转下放中起缓冲作用。出料随动滚轴分别设置在左摆动溜槽末端和右摆动溜槽末端。
分流摆动机构设置在固定溜槽末端中部,位于左转向溜槽、右转向溜槽之间。分流摆动机构包括摆动板、随动滚圈、输出轴、固定法兰、减速器和伺服电机。摆动板前端为自由端,是与固定溜槽倾斜角度相匹配的板件,摆动板位于固定溜槽上方,摆动板后端设置在输出轴上端。输出轴垂直设置在固定溜槽末端的中部,随动滚圈设置在摆动板下侧的输出轴上,固定法兰、减速器和伺服电机依次连接设置在输出轴下端。减速器和伺服电机通过输出轴驱动摆动板左右摆动。

图1 袋装水泥自动双向分流转向溜槽装置结构
控制系统包括光电传感器和控制器。光电传感器分别设置在固定溜槽前端两侧,检测袋装水泥输送主皮带机转弯溜子的来料信号,将来料信号发送至控制器。控制器控制RV减速器和伺服电机驱动摆动板快速左右摆动。
工作过程中,袋装水泥在输送主皮带机上经电动转弯溜子转弯后,进入皮带机来料接口板;光电传感器检测袋装水泥输送主皮带机转弯溜子的来料信号,并将来料信号发送至控制器;控制器根据装车工艺要求控制RV减速器和伺服电机驱动摆动板快速向左或向右摆动。袋装水泥在固定护板导向下,沿固定护板靠自身重力下滑并调整方向,弧形护板起到辅助保护作用,然后经过接料随动滚轴向下溜到固定溜槽,有一定斜度的固定溜槽能使袋装水泥加速下滑并随摆动板下侧的随动滚圈进入相应的左转向溜槽或右转向溜槽。由于左转向溜槽和右转向溜槽中部有凸起的弧形过渡结构,能使袋装水泥转弯更加顺畅地经过中间随动滚轴。分流摆动机构见图2。
左摆动溜槽和右摆动溜槽可以根据在线式袋装水泥自动装车机器人的装车斜辊道高度,围绕中间随动滚轴进行一定角度的旋转摆动,调整袋装水泥出口的高度位置。扭簧在左摆动溜槽和右摆动溜槽旋转下放中起缓冲作用。袋装水泥进入相应的左摆动溜槽或右摆动溜槽后,经出料随动滚轴,可在出口稳定下滑到指定位置。
3 袋装水泥运动仿真分析
采用离散元软件Edem 进行运动仿真分析,如图3 所示,将袋装水泥设定成直径为90mm 小颗粒模型,在袋装水泥模型内部生成80个目标小颗粒。仿真相关参数如表1。
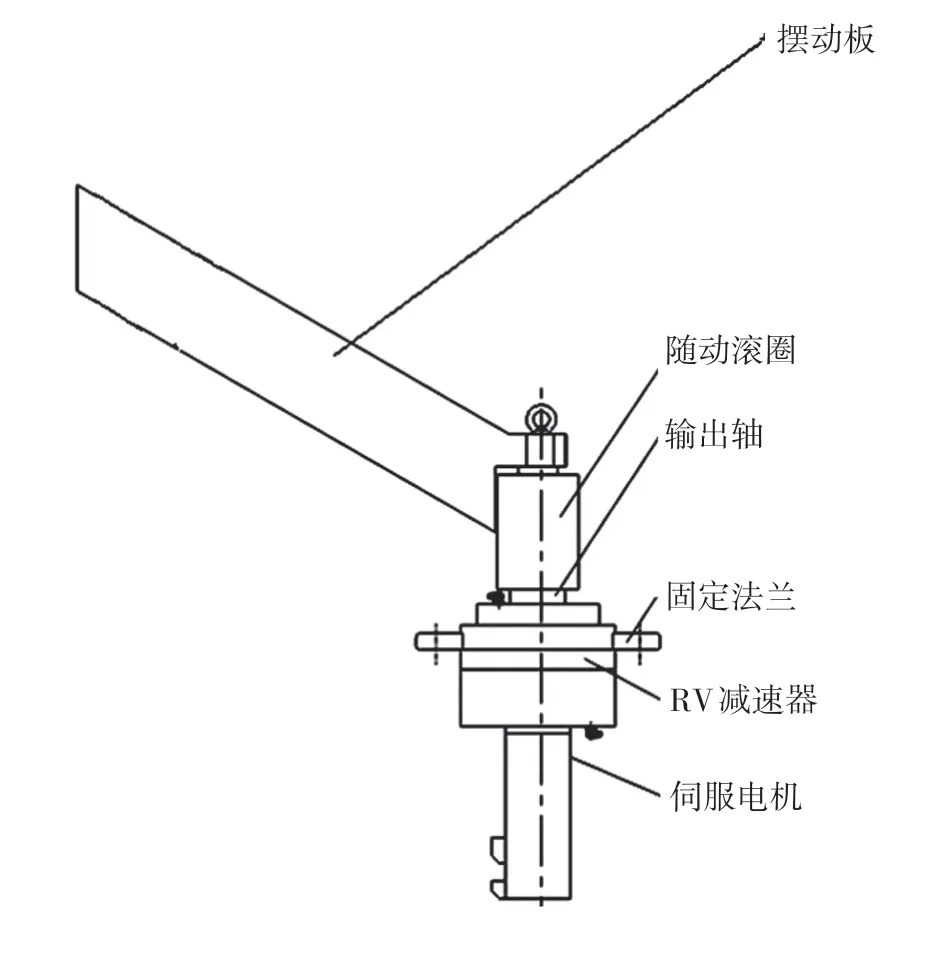
图2 分流摆动机构

图3 袋装水泥粘结颗粒运动仿真分析
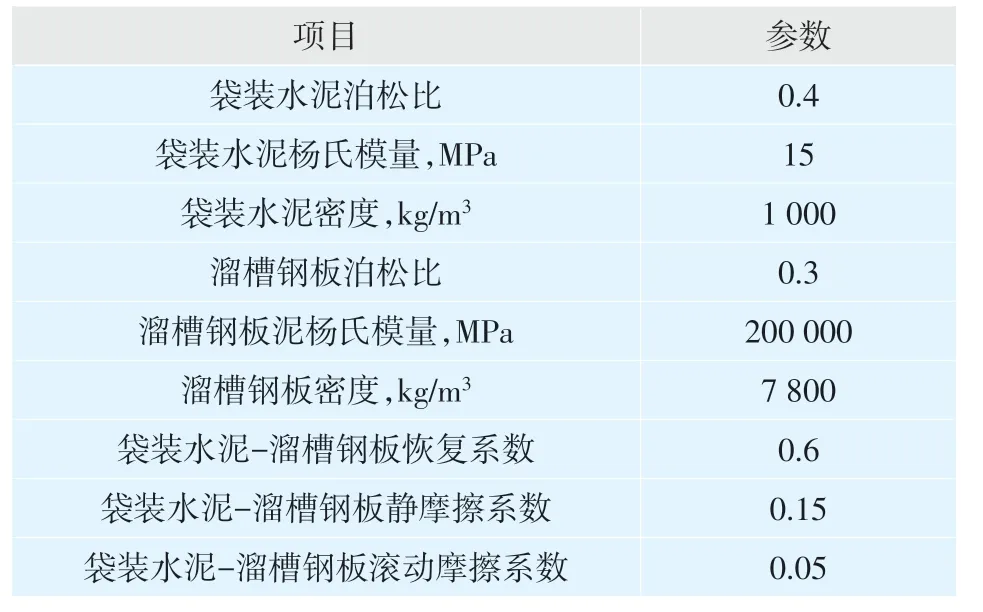
表1 仿真参数设置
袋装水泥右转向见图4,从图4可以看出,袋装水泥进入固定溜槽后,由于存在倾斜角度能依靠重力加速下滑,在碰到摆动板开始转向的同时,前段进入右转向溜槽,右转向溜槽中部凸起的弧形过渡结构使得袋装水泥转弯更加顺畅地经过中间随动滚轴;袋装水泥在向下滑落的同时继续转向到90°,最后从右摆动溜槽快速滑出。袋装水泥左转向示意图见图5,由图5可以看出,摆动板快速摆到另一侧后,袋装水泥向左转向90°并快速滑出。向左转向的过程与向右转向的过程类似,验证了结构设计的合理性。
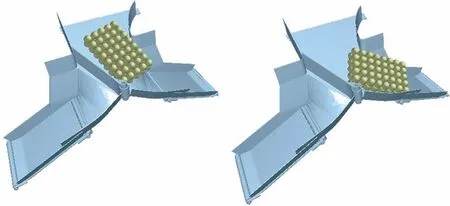
图4 袋装水泥右转向

图5 袋装水泥左转向
4 结语
袋装水泥自动双向分流转向溜槽装置可使左右分流集中于一体,入口前端只需配置一个皮带式电动转弯溜子,即可快速将主皮带机输送来的袋装水泥按要求分流给在线式袋装水泥自动装车机器人的两个抓手。采用仿真软件Edem对袋装水泥在自动双向分流转向溜槽装置内的运动进行仿真分析,验证了整体结构设计的合理性。袋装水泥自动双向分流转向溜槽装置已成功应用于袋装水泥自动装车机器人,现场数据显示,可满足装水泥3 000包/h的装车速度。
猜你喜欢
机电工程技术(2022年12期)2023-01-10 03:25:36
山西冶金(2022年3期)2022-08-03 08:39:42
汽车实用技术(2022年11期)2022-06-20 02:22:44
机械制造(2022年3期)2022-04-07 08:02:02
环球时报(2020-02-18)2020-02-18 06:14:23
知识就是力量(2019年10期)2019-10-28 04:24:59
中国科技博览(2017年2期)2017-03-30 18:11:28
机械工程师(2015年10期)2015-02-02 01:14:34
汽车零部件(2014年5期)2014-11-11 12:24:32
制造技术与机床(2014年7期)2014-04-27 13:07:10
