
鲜莲子去皮机设计与参数优化
2021-02-01 11:15:40徐谐庆丁为民张万里刘木华
农业机械学报 2021年1期
徐谐庆 丁为民 张万里 刘木华
(1.南京农业大学工学院, 南京 210031; 2.江西农业大学工学院, 南昌 330045)
0 引言
莲子为睡莲科植物的果实,具有很高的营养价值,既可食用也可药用,广泛种植于我国南方地区[1]。莲子呈椭球形结构,主要由莲壳、莲仁、莲皮、莲芯等构成,莲壳包裹在莲仁外面,莲皮紧紧附着在莲仁表面,莲芯则长在莲仁内部。通芯白莲主要加工工序包括莲子脱篷、剥壳、去皮、通芯、干燥等[2],其中去皮工序尤为费时,手工去皮费时费力,难以满足生产需求。莲子当天采收、当天烘干品质最好。市场上因缺乏鲜莲子去皮设备而减少了种莲收入。因此,研制一款结构简单、成本低廉的鲜莲子去皮机对提高农民种莲收入有着重要意义。
有研究者对莲子的外形尺寸及力学特性进行了研究[3-5],为设计莲子加工机械设备提供了参数依据。莲子主要种植于中国,国外对莲子加工机械的研究较少。目前,对果蔬去皮的主流方法有摩擦去皮法[6-9]、化学去皮法[10-14]、高压蒸汽去皮法[15-18]、水射流去皮法。摩擦去皮法利用摩擦的原理将果蔬表皮去掉,该方法容易使莲子表面受到微观损伤,烘干后影响色泽,因此并未大量推广。化学去皮法是将果蔬置于较高温度的碱液中浸泡,利用化学反应达到表皮分离的目的。相关研究表明,采用化学法去皮容易改变果蔬的表皮颜色,从而影响莲子烘干后的口感及色泽。高压蒸汽去皮法应用于果蔬去皮具有较好的效果,但高温蒸汽容易将果肉表面层熟化,而且熟化层通常超过3 mm,而莲子颗粒较小,可能导致莲子熟化从而影响品质。针对水射流去皮技术,黃文禄等[19]研究了水射流压力及滚筒转速对莲子去皮效果的影响,研究表明,莲子去皮的水射流压力通常为0.5~0.65 MPa。曹志强[20]发明了一种基于水射流去皮的莲子剥壳脱皮一体机,该机采用一种往复滑动式刀片进行切壳,再利用摆动的水射流对准旋转的莲子去皮,机器的脱壳率为95%左右,去皮率为92%左右,损伤率低于3%,加工后的莲子品质与手工相差无异,但是该机对脱壳后未去皮的莲子不能重复加工,一台机器通常还需要配套2~6人进行手工去皮。随着莲子剥壳技术的不断成熟[21-25],多数中小型农户采用莲子剥壳机剥壳后再用手工去皮。而市场上尚未有专门针对鲜莲子去皮、且技术成熟的机械设备。综合比较果蔬去皮的各类方法,采用水射流去皮可以得到与手工加工相差无异的果蔬品质。因此本文设计一款基于水射流去皮方法、结构简单、成本较低的鲜莲子去皮机,该机对脱壳后的莲子可进行二次或者多次重复去皮,从而减少手工作业,提高去皮效率。
1 整机结构及设计指标
鲜莲子去皮机整机结构如图1所示,主要包括机体、传动机构、进料装置、夹持装置、去皮装置、挡水装置和出料装置等。作业时,启动机器开始按钮,莲子倒入主料斗,然后滑入进料装置,进料装置上的进料滚轮使得莲子逐个分离并通过进料溜槽落入夹持装置,去皮装置上喷嘴喷出的水射流直击在莲子表面,莲子被约束在夹持装置内,夹持装置驱动莲子绕自身轴线旋转,莲子在旋转的过程中结合水射流冲击从而完成整个去皮过程,完成去皮后,挡水装置将喷嘴喷出的水射流挡住,去皮滚轮旋转到适当位置时莲子自动落入去皮滚轮的卸料孔中从而完成卸料,与此同时,下一个莲子立即进入夹持装置中,莲子调整好姿态后挡水装置落下,喷嘴喷出的水射流再次击打在待去皮莲子表面,从而保证机器循环连续作业,加工过程中废水、掉落的莲子及莲子皮通过回收槽统一收集。由于缺乏相关技术标准,为满足农户使用要求,拟定的鲜莲子去皮机设计指标如表1所示。

表1 鲜莲子去皮机设计指标Tab.1 Design index of fresh lotus seed peeling machine
2 关键部件设计
2.1 传动路线
设计的鲜莲子去皮机传动路线如图2所示,电机通过三角带带动水泵运行,水泵上的附加带轮再通过三角带带动中转轴运行,中转轴通过链条同时带动软胶轴和摆轮摆杆轴运行,并且中转轴通过另外一根链条带动进料轴运行,进料轴再通过链条带动滚轮轴运行,滚轮轴通过两个凸轮分别驱动挡水板组件以及摆轮摆杆组件运行,从而完成了整个传动过程。电机的额定转速为1 420 r/min,通过理论计算得到滚轮轴的理论转速为62.3 r/min,而通过转速仪器测量实际转速为60.5 r/min,与理论值有微小的差异,这可能是带轮直径偏差造成的,滚轮轴每旋转一圈加工一个莲子,因此滚轮轴的转速决定了加工效率。
2.2 进料装置设计
进料装置主要由主料斗、副料斗、振动装置、进料滚轮和进料溜槽等组成,主料斗通过螺栓安装在机体上(如图1所示),主料斗的安装高度可以上下调整,从而可以调整主料斗和副料斗之间的间距。除去主料斗的进料装置结构如图3所示,副料斗通过3个支撑脚安装在副料斗支撑架上,振动电机的偏心块高速旋转产生离心力,在离心力的作用下,支撑脚产生形变从而使得整个副料斗及其组件产生细微振动,振动频率与电机转动频率一致,振动电机的转速可以通过调速器调整,正常状态下转速在1 500 r/min左右时即可稳定进料,也就是振动频率为25 Hz为较佳的状态,副料斗呈圆柱形,安装时与水平面呈微小的夹角并且保证副料斗下料口为低点,有利于增加莲子进入下料口的概率,副料斗下料口采用不锈钢材质并弯曲成弧形结构便于莲子顺利下料,副料斗下料口的上端采用柔软的毛毡块作为夹层并通过副料斗下料口盖板以及螺栓螺母压紧,毛毡块的作用是保护莲子不受到损伤。莲子在副料斗振动的状态下均匀地进入副料斗下料口,进料滚轮的凹孔形状设计为由浅至深且中间呈弧形结构,凹孔的深度能容纳一个较大的莲子(设计参数为17 mm),随着进料滚轮旋转莲子与进料滚轮的弧面接触,在摩擦力的作用下莲子调整到卧式姿态即莲子长轴线方向与进料滚轮轴线方向平行,当进料滚轮的凹孔刚好转到副料斗下料口的出口位置时,莲子逐渐进入凹孔的内部,随着进料滚轮的旋转最终在重力的作用下直接落入进料溜槽,最终进入到夹持装置中。
振动电机产生的离心力计算公式为
Fc=mω2r
(1)
其中
ω=2πn/60
式中Fc——单个偏心块产生的离心力,N
m——偏心块质量,kg
ω——偏心块角速度,rad/s
r——偏心块质心到中心的距离,m
n——偏心块转速,r/min
偏心块的模型如图4所示,利用Creo中的质量属性功能测得偏心块质量m=49.8 g,r=0.008 7 m。取n=1 500 r/min,并将偏心块的参数代入式(1)可得Fc=1.068 N,本文采用的是双头振动电机,其产生的总离心力为2.176 N。在偏心块的激振作用下,偏心块产生的离心力与运动方向相切,偏心块旋转过程中离心力的方向也随之发生周期性变化,因此作用在副料斗上的作用力也会发生周期性变化,副料斗通过螺栓紧固安装在支撑脚上,支撑脚产生变形从而驱动副料斗组件来回摆动,摆动的幅度通常不超过3 mm,通过改变后面的两根支撑脚的角度则可以调节整个支撑脚在Y轴(以图4坐标为参考)方向上的刚度,从而可以调节副料斗组件的摆动幅度,而振动频率与振动电机的转速相关,经过多次试验可知稳定进料的频率通常需要大于25 Hz,通过转速仪测得振动电机的最高转速为2 332 r/min,因此将调速器调到最大振动频率(38.9 Hz),相应地转速增加振动电机产生的离心力也会增加,振动力加大容易造成噪声增加以及振动电机使用寿命减小,因此通常状态下振动电机的频率调整为25~30 Hz,转速为1 500~1 800 r/min。
2.3 夹持装置设计
夹持装置如图5所示。夹持装置的夹持区间主要由去皮滚轮、软胶轴套、摆轮摆杆轴套合围而成,软胶轴套套装在软胶轴上并随着软胶轴旋转,去皮滚轮套装在滚轮轴上并随着滚轮轴旋转,摆轮摆杆轴套套装在摆轮摆杆轴上并随着摆轮摆杆轴旋转,摆轮摆杆轴由万向联轴器带动旋转,摆轮摆杆轴安装在摆轮摆杆上并且可以绕着支点旋转,弹簧一端挂接在摆轮摆杆的一端,通过调节弹簧的预紧力从而达到压紧莲子的目的。摆轮摆杆驱动装置通过凸轮带动,摆轮摆杆驱动装置向上运动时顶起摆轮摆杆组件,进料溜槽内的莲子则可以顺利进入到夹持装置中,摆轮摆杆驱动装置向下回位时,摆轮摆杆在弹簧弹力的作用下自动回位并将莲子压紧,压紧莲子时摆轮摆杆驱动装置的轴承与摆轮摆杆保持适当的间隙,从而保证最小的莲子也能被压紧,倘若莲子未被压紧,水射流会造成莲子在去皮空间内窜动,从而易造成莲子去皮不完全和局部损伤。
去皮滚轮组件通过螺栓紧固安装在滚轮轴上,其结构如图6所示,主要包括去皮滚轮、卸料孔盖板、毛毡带,毛毡带胶装在去皮滚轮上。去皮滚轮采用尼龙材料并利用加工中心加工而成,去皮滚轮主要由落料区间、进料区间、爬升区间、姿态调整区间以及去皮区间组成,落料区间主要为卸料孔,卸料孔两侧通过卸料孔盖板封闭,防止完成加工的莲子从两侧掉落,卸料孔要足够容纳2个最大的莲子,防止进料滚轮同时进2个莲子或者进料溜槽内滞留一个莲子时将卸料孔堵住;进料区间主要由更深且更宽大的弧形曲面构成,加大进料空间可使莲子顺利进入夹持装置,防止无序状态下滑的莲子堆积在进料溜槽导致堵料;去皮滚轮朝着逆时针方向旋转一个角度后,莲子则进入爬升区间并进入到姿态调整区间,随后摆轮摆杆组件逐渐下压,莲子逐渐被压紧,压紧后的莲子在软胶轴套、摆轮摆杆轴套以及去皮滚轮三者同向旋转的作用下绕自身轴线旋转,从而使得莲子调整到卧式姿态(即莲子长轴线方向与去皮滚轮轴线方向平行),随后莲子进入到去皮区间,此时挡水板组件打开,水射流击打在莲子表面,随着莲子绕自身轴线的旋转从而完成全方位去皮,完成去皮后莲子则进入到落料区间,进入落料区间之前,挡水板预先将水挡住,莲子在挡住水的状态下自动掉入落料区间的卸料孔内,莲子随着去皮滚轮的旋转完成卸料过程,下一个莲子则自动进入到进料区间,从而完成莲子去皮的连续作业。
弹力调节装置如图7所示,摆轮摆杆通过螺母紧固在支撑座上,摆轮摆杆紧固的孔采用腰形孔结构,因此可以调整支点O的位置,支撑座的转轴可以绕支点O旋转,弹簧的一端挂接在摆轮摆杆上,另一端挂接在螺栓上,螺栓通过两个螺母紧固在弹簧调节架上,通过调节螺栓的上下从而达到调整弹簧预紧力的目的。摆轮摆杆轴套压在莲子表面,假设莲子为标准椭球形,因此作业时摆轮摆杆保持静止状态,此时这两个力的力矩之和为零。根据合力矩定理:平面汇交力系的合力对于平面内任意一点之矩等于所有各分力对于该点之矩的代数和,可得
F1L1sinβ-FsL2sinα=0
(2)
式中Fs——弹簧的预紧力,N
F1——摆轮摆杆轴套施加在莲子表面的作用力,N
L1——摆轮摆杆轴套中心到支点O距离,mm
L2——弹簧与摆轮摆杆接触点到支点O的距离,mm
α——预紧力Fs与L2的夹角,(°)
β——作用力F1与L1的夹角,(°)
施加在莲子表面的作用力F1加大会造成莲子与去皮滚轮上毛毡带的摩擦力加大,从而导致莲子表面产生损伤,F1过小则难以压住莲子,莲子容易被水射流的冲击力击飞而脱离夹持装置,计算时以12 N为例,摆轮摆杆的支点以摆轮摆杆的腰孔中心点O为基准进行计算,测量可得L1=0.116 4 m,L2=0.041 6 m,α=73.2°,β=82.2°,代入式(2)得Fs=34.75 N,根据得出的预紧力对弹簧进行选型,所选弹簧参数为:线径2.0 mm,中径为16 mm,初始有效长度为61 mm,弹性系数K为1.7 N/mm。根据胡克定律,弹簧的弹力与弹簧的伸长量成正比关系,计算公式为
ΔFs=Fs-Fs0=KΔS
(3)
根据式(2)、(3)解得ΔS=ΔFs/K=20.4 mm。弹簧在初始状态时的预紧力Fs0=0 N,因此设计时螺杆可调节的余量保留0~25 mm即可满足弹簧弹力调节要求。
弹力调节方法如图8所示,用弹簧秤勾住摆轮摆杆轴垂直向上拉起,当摆轮摆杆轴刚好离开莲子表面时读取弹簧秤上的数据,若读数超过15 N则将螺栓向下调整减小弹力,若读数小于10 N则螺栓向上调整增加弹力,调整完后再次以同样的方法进行检测,直到将弹力调整到(12±1)N为止。
莲子在夹持装置中的受力分析如图9所示,以莲子的几何中心O为原点建立直角坐标系,莲子受到的力主要为水射流产生的冲击力、3个滚轮的摩擦力以及3个滚轮的法向支撑力,3个滚轮的摩擦力沿着接触点的切线方向,而3个滚轮的法向支撑力沿着接触点并朝向原点方向。根据力学原理,假定莲子是标准椭球形,根据力平衡原理,莲子在夹持装置中的位移为零,因此其法向合力为零,由于莲子会在摩擦力作用下产生旋转,因此切线方向的合力不为零,由于切线方向受到的力是摩擦力造成的,摩擦力的大小与法向力成正比关系,摩擦力的方向与接触点相切,其合力矩大于零。根据上述条件得到
(4)
式中FR——合力
F1n——摆轮摆杆轴套对莲子的法向力
F2n——软胶轴套对莲子的法向力
F3n——去皮滚轮对莲子的法向力
Fw——水射流对莲子法向力
G——莲子受到的重力
Fit——某个接触点受到的摩擦力
Fin——某个接触点受到的正压力
μi——某个接触点的摩擦因数
Mo——合力矩
F1t——摆轮摆杆轴套对莲子的切向力
F2t——软胶轴套对莲子的切向力
F3t——去皮滚轮对莲子的切向力
r——莲子半径
从式(4)可以看出,在同等条件下力F1n增大时,F2n以及F3n也会增大,法向力增大时相应的摩擦力也会增加,而弹簧的预紧力Fs与F1n成正比关系,因此弹簧的弹力增加容易导致接触点对莲子的摩擦力增大,导致莲子表面受到损伤,但与此同时摩擦力产生的合力矩也增大,更容易使得莲子旋转。
图9中的b表示去皮滚轮的最低点到软胶轴套的距离,b过大则较小的莲子容易直接随着去皮滚轮向下挤压落料无法完成去皮过程,而a为水射流进水间隙,随着莲子的大小变动而变动,若b值过大,莲子会整个下沉,a值则会减小,部分水射流则不能进入夹持装置从而导致去皮不完全,设计时b越小越好,受去皮滚轮凹槽所限取值为8.5 mm,而最小莲子的直径为11.5 mm,因此即便最小的莲子也不会从夹缝中落下,综合测量各地的莲子其直径平均值通常为15 mm左右,为满足大多数莲子的加工,设计时以此值作为设计依据,a取值范围为4~8 mm,若莲子个头整体偏小则需要调整摆轮摆杆的位置,使得摆轮摆杆轴套的位置右移,腾出空间使得水射流能进入去皮空间从而增大a值。
2.4 去皮装置设计
去皮装置如图10所示,主要由水枪架、喷管、喷嘴等组成。水枪架通过螺栓紧固安装在机体上,水枪夹通过两个螺栓紧固安装在水枪架上,通过松紧螺栓可以实现水枪夹上下位置的微调,水枪夹上焊接有水枪夹调节架,水枪夹调节架上装有限位螺栓和限位螺母,通过微调限位螺栓的长短可以实现喷管夹角的微调,调整到合适的角度后把水枪夹紧固螺母锁紧即可,喷管安装在水枪夹上,喷嘴紧固安装在喷管上,松开水枪夹紧固螺栓则可以实现喷嘴喷管的前后调整以及喷管角度的调整,从而实现水射流打击在莲子上倾角的调整,本文设计的去皮装置的两个喷嘴对称布置,水射流从喷嘴喷出后分别从莲子的两端击打在莲子表面,在莲子自转的作用下,能全覆盖莲子整个表面,从而完成去皮操作。
喷嘴喷出的水射流作用在莲子表面的示意图如图11所示,假设水射流的宽度为W,水射流厚度为δ,水射流与莲子长轴线的夹角为θ,两个水射流之间的间隙为L,莲子的长径为H,中径为V,为了达到完全去皮的目的,必须满足公式
2Wcosθ+L>H
(5)
调节喷嘴位置时以中等大小的莲子为基准,保证水射流最边缘的位置超过莲子长轴方向的最边缘,而两股水射流的间隙L范围为2~4 mm即可,莲子中间的皮最容易去除,依靠与滚轮的摩擦以及水射流打击在莲子表面形成反流时的水压力即可去除,但是L过大则会造成莲子中部去皮不完全。若加工的莲子普遍偏大则需要将喷嘴向后退,同时增加水射流的水压来弥补作用在莲子表面的压强,由于水射流离开喷嘴后呈扇形扩散,因此喷嘴后退导致W增加,从而增加去皮的覆盖区域,通常情况下喷嘴离莲子表面的距离为25~40 mm,当水射流距离莲子超过40 mm后容易使得莲子表面产生白斑(水射流力离靶向物越远越容易混入空气,容易造成莲子表面受力不均匀从而造成莲子表面微观损伤,烘干后莲子表面会产生白斑)。假设L=3 mm,H为最大的莲子长径,测得红花莲长径最大值可达22 mm,假设θ取15°,代入式(5)得W>9.8 mm。
根据上述水形的宽度设计喷嘴,水射流的速度和流量与喷嘴的入口压力相关,由于水射流速度很快而且出口处的水形很窄,出水口的当量直径为1.3 mm,因此只有将水射流水形放大才能更好地观察喷嘴的水形以及流量,喷嘴水形检验方法如图12所示,喷嘴卡在卡槽处,喷嘴离壁面460 mm,从图12中可以看出水射流喷出喷嘴后几乎呈扇形结构,因此当水形末端水形宽度为120 mm时,根据相似三角形的原理求解得距离喷嘴35 mm位置的水形宽度为10.05 mm,满足要求。由于机器是两侧同时加工的,因此每个喷嘴都需要检验,若两边喷嘴的水形和流量不一致则会导致机器两侧的去皮效果不一致,喷嘴检验标准为:水泵压力为1 MPa,检测距离为460 mm处的水形宽度为(120±5)mm;流量为(5.00±0.30) L/min。
2.5 出料装置设计
出料装置如图13所示,主要由安装支杆、紧固螺母以及出料槽组成,出料槽采用钣金整体加工而成,出料槽的前端折弯有两个法兰,并且利用两根安装支杆和螺母紧固安装在机体上,出料槽的一端与去皮滚轮贴合并且宽度与去皮滚轮一致,从而尽可能减少上方已经去除的莲皮掉落到出料槽中,另外一端向下倾斜并逐渐呈喇叭口增大从而增加莲皮滤除的概率,在出料槽的末端位置设置了一个凸起,利用莲子和莲皮物理特性的不同实现莲子和残余的莲皮彻底分离,莲子呈椭球颗粒状,下滑过程中遇到凸起则会跳起越过障碍,莲皮呈细小块状且柔软,随着部分水流越过凸起从缝隙中掉落,从而达到莲皮与莲仁彻底分离的目的,经过试验验证,凸起高度通常在5~7 mm,间隙为5~8 mm最佳,间隙过大,容易造成小莲子或碎莲子将间隙堵塞从而影响分离效果。出料槽与水平面的夹角通常为15°~20°,夹角越大,出料槽越陡,水流速度也越快,容易使得莲皮越过凸起落入收集框,夹角过小,莲子的运动速度变慢,小粒莲子或者碎莲子难以越过凸起从而容易导致莲子堆积在凸起处。
3 试验
3.1 试验设备与材料
试验设备为设计的鲜莲子去皮机以及电子秤,于江西省广昌县兴莲机械制造有限公司进行机具试验。试验材料为当天采摘并经过人工挑选的成熟新鲜莲子,剥壳采用江西省广昌县兴莲机械制造有限公司制造的莲子剥壳机。试验于2019年9月1—3日完成,机器放置于调试区,并将水泵的进水管、出水管与储水缸连接。试验现场如图14所示。
3.2 试验方法与指标
在试验过程中发现影响去皮作业效果的主要因素有水射流压力、水射流倾角和加工速度。其中水射流压力通过水泵的调压阀调整,可调范围为0~2.5 MPa,根据莲子的成熟度去皮所需水射流压力通常分布在0.4~1.2 MPa,而成熟莲子的去皮压力通常在0.6~0.8 MPa;水射流倾角可通过旋转去皮装置上喷管进行调整,其调整范围通常为0°~30°。加工速度通过更换水泵上的附加带轮调整,此带轮是整机的主动力,改变带轮直径可改变加工速度,试验采用的带轮直径分别为60、68、76 mm,其对应的滚轮轴转速理论值分别为56.6、62.3、67.9 r/min。由于机器两侧的喷嘴精度和机械加工精度会导致机器两侧的去皮效果差异,因此试验安排时均以机器同一侧的数据作为统计依据。试验因素编码如表2所示。

表2 试验因素编码Tab.2 Coding of factors and levels
为了保证试验的准确性,每次试验用电子秤称取4 kg的去壳莲子作为单次试验的数据统计,测得此次试验的去壳莲子的千粒质量为2 975 g,统计4 kg去壳莲子的总个数为(1 345±20)个,由于样本总数保持在一个稳定的范围,试验结果采用百分比进行衡量,因此样本总数有细微的偏差对试验结果没有影响,采用称量的方式进行定量试验可以减少试验时间,统计每次试验完整去皮莲子数量n1、破损莲子数量n2、带帽头莲子数量n3、开边莲子数量n4、掉落莲子数量n5、未完全去皮莲子数量n6。破损的莲子与开边的莲子存在较大的区别,开边的莲子主要是由于水射流透过莲子张开的缝隙进入莲子内部产生水楔效应从而导致莲子沿着生长纹理裂开成两瓣,开边的莲子与水射流倾角存在较大的关系,因此作为评价指标时将这个指标与破损莲子区别对待。评价指标主要有去皮率R1、损伤率R2、带帽头率R3、开边率R4、掉莲率R5、未去皮率R6,由于未去皮率R6受到前面5个指标的影响比较大,因此分析时不考虑R6。
3.3 试验方案与试验结果
采用Design-Expert三因素三水平的Box-Behnken响应面法进行试验安排,试验方案和试验结果如表3所示。
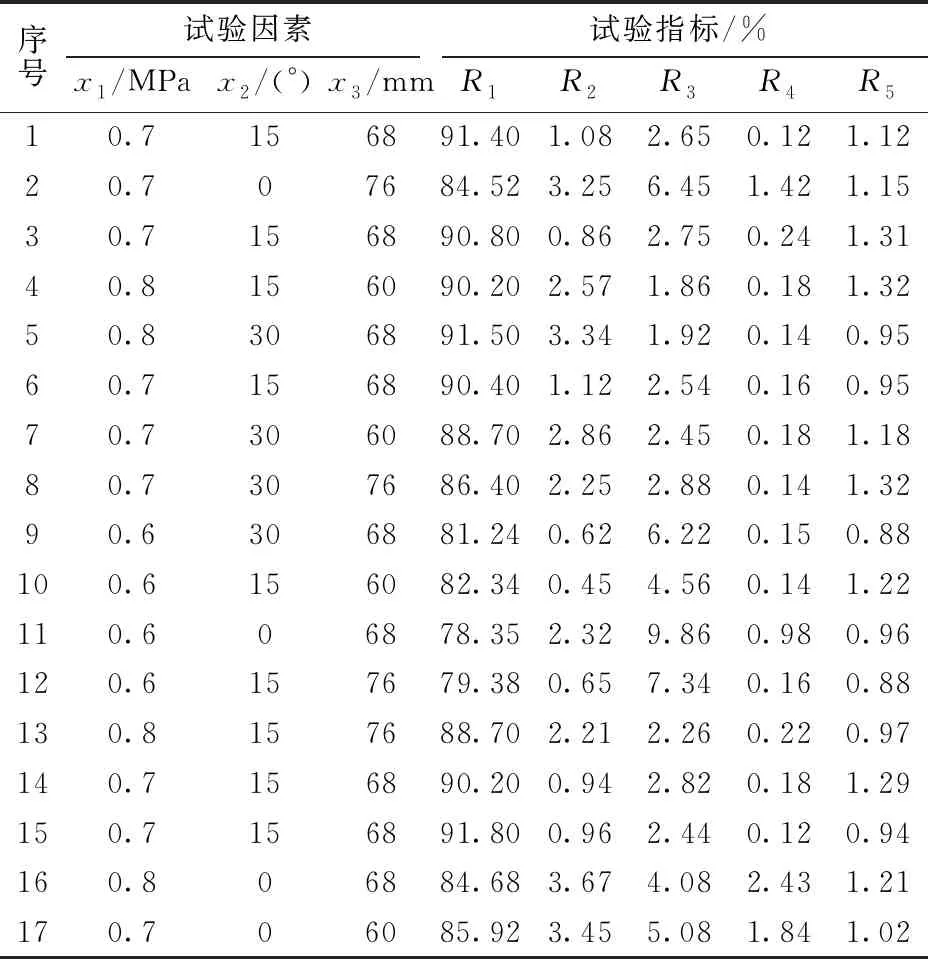
表3 试验方案和试验结果Tab.3 Experiment scheme and results
4 试验结果分析
4.1 显著性分析
应用Design-Expert软件对表3中的数据拟合并进行方差分析,得到的显著性检验结果如表4所示。经过检验发现掉莲率R5的模型不显著,说明该指标是其它因素造成的,与这3个主要影响因素无关,该指标可能是进料不稳定导致,进料滚轮同时进两个莲子必然会有一颗掉落,因此该指标在此模型中不做进一步分析。R1的模型显著性检验F=47.21,P<0.001,R2的模型显著性检验F=112.9,P<0.001,说明这两个指标的二次回归方程检验达到高度显著,且R1的失拟项检验F=2.44,P>0.1,R2的失拟项检验F=2.83,P>0.1,这两个检验指标的失拟项均不显著,说明在试验范围内这两个模型的拟合度非常好,因此可以用此模型对水射流压力x1、水射流倾角x2以及带轮直径x3这3个因素的影响效果进行分析和预测。R3的模型显著性检验F=62.77,P<0.001,R4的模型显著性检验F=22.3,P<0.001,说明这两个指标的二次回归方程检验达到高度显著,但是R3的失拟项检验F=12.96,P<0.05,R4的失拟项检验F=35.26,P<0.05,这两个检验指标的失拟项均显著,说明在试验范围内这两个模型的拟合度不是很好,因此用此模型来对水射流压力x1、水射流倾角x2以及带轮直径x3这3个因素的影响效果进行分析和预测具有一定的参考意义。应用Design-Expert软件得到的回归系数,去除其中的不显著项后得到的二次多项式回归模型为

(6)

(7)

(8)

(9)
式中X1——水射流压力编码值
X2——水射流倾角编码值
X3——带轮直径编码值

表4 显著性检验结果Tab.4 Significance test result
4.2 响应曲面分析

图15所示为去皮率R1、损伤率R2、带帽头率R3、开边率R4的响应曲面。可以直观地看出x1、x2对去皮率R1的影响极其显著,而带轮直径x3(相当于加工速度)对R1影响小,从图15a中可以看出,去皮率R1随着水射流压力增大而增大,但是当压力超过0.75 MPa后则开始逐渐减小,这是因为压力增加损伤率和开边率也提高,而去皮率R1是不包含去掉皮的损伤的莲子以及开边的莲子,从而导致到了一定压力后,去皮率反而有所下降,同样通过图15a可明显地看出去皮率R1随着水射流倾角先增大后减小,当水射流倾角为0°时最低,总体的水形最宽,水射流分散,作用在莲子表面的水射流有效面积减小,多余的水射流从莲子两端的切线方向穿过,随着角度的增加,水形收窄并且集中打在莲子表面,从而使得水射流不能打到莲子的两端,导致完整去皮的莲子数量减少,而水形收窄后,水形变得更厚,而水射流进入夹持装置的间隙a值是随着莲子大小变化而变化,当莲子偏小时a值减小,则水射流无法全部直接击打在莲子表面,部分水射流会击打在软胶轴套或者摆轮轴套上形成反流,从而使得去皮率下降。通过图15d、15e、15f可以直观地看出x1、x2、x3对损伤率R2影响均显著,从图15d中可以看出,损伤率R2随着水射流压力增大而增大,随着水射流倾角增大先减小后增大,这是由于当水射流倾角为0°时,水射流的水形所形成的平面刚好与莲子的两片子叶的缝隙平行,当莲子转到适当位置时水射流则通过两片子叶的缝隙进入到莲子内部形成了水楔效应,从而容易使得莲子破损或者开边,随着水射流倾角的增加,水射流的打击范围收窄,水射流集中作用在莲子表面,莲子表面局部受到的水射流冲击力过大,从而使得莲子受到的损伤增加,通过图15f可以看出损伤率R2随着带轮直径x3增加(相当于加工速度加快)而有微小减小,这是由于加工速度加快,水射流作用在莲子表面的时间减少,损伤率则会有所下降。通过图15g、15h、15i可以直观地看出x1、x2、x3对带帽头率R3影响均显著,通过图15g可以明显的看出带帽头率随着水射流压力的增加而降低,而随着水射流倾角的增加先降低后升高,这是因为当水射流倾角为0°时,水射流水形更分散,作用在莲子两端的水射流冲击力减弱,随着角度的增加作用在莲子两端的水射流更加集中导致冲击力加大,去除莲子帽头的能力也就越强,当水射流倾角增加到一定程度时,水射流水形收窄,水射流的水形将难以打到莲子的两侧,因此带帽头率又会有所升高;通过图15h可以看出带帽头率R3随着带轮直径增加(相当于加工速度加快)有略微的增加,这是加工速度越快,水射流作用在莲子上的时间减少导致的。通过图15j、15k、15l可以直观地看出x1、x2对开边率R4影响均显著,而带轮直径x3对开边率的影响不显著,通过图15j可以看出随着水射压力的增加开边率逐渐增加,通过图15j、15l明显可以看出随着水射流倾角的增加开边率逐渐降低,这是由于当水射流倾角为0°时,水射流的水形所形成的平面刚好与莲子的两片子叶的缝隙平行,当莲子转到适当位置时水射流则通过两片子叶的缝隙进入到莲子内部形成水楔效应,从而容易使得莲子更容易开边,随着水射流倾角的增加,水射流的打击范围收窄,水射流是逐渐进入缝隙中的,因此更加不容易开边。
4.3 参数优化
去皮率R1是评价整机性能的最重要指标,去皮率越高越好,而其余的指标均是越低越好。利用Design-Expert软件的寻优功能,设置约束条件为
{max(R1),min(R2),min(R3),min(R4)}
综合考虑以上指标得到的最优解以及预测值为:x1=0.71 MPa,x2=18.58°,x3=67.18 mm,R1=91.80%,R2=1.13%,R3=2.06%,R4=0.04%。
4.4 验证试验
考虑到机器的实际情况,对影响因素进行微调,取水射流压力x1=0.70 MPa、水射流倾角x2=18.00°、带轮直径x3=68 mm进行验证试验。每次试验同前面的试验一样称取4 kg去壳莲子作为试验样本,试验重复进行3次,试验结果取平均值,对数据进行处理与分析后,由于掉莲率与这3个影响因素无关,因此试验验证时将此指标排除在外,得到的试验结果如表5所示。

表5 验证试验结果Tab.5 Experiment result of verification %
由试验可知去皮率为92.63%,其与理论优化结果的相对误差小于2%,说明所建的模型与优化参数的可行性和准确性较高,而损伤率为1.24%,带帽头率为2.72%,开边率为0.21%,虽然这3个指标的相对误差均超过了10%,但是这3个指标的值都非常低而且其绝对误差总体来说并不太高,同样可以说明所建立的模型与优化的参数具有一定的参考价值,优化后的鲜莲子去皮机总体上达到了设计指标,基本满足作业要求。
5 结论
(1)设计了一款基于水射流去皮原理的鲜莲子去皮机,该机利用夹持装置约束莲子并驱动莲子绕自身轴线旋转,再利用两股对称的水射流打击在旋转的莲子表面,从而完成去皮过程,加工过程中的废水、碎莲子及莲子皮可通过回收槽统一收集。
(2)试验表明,影响鲜莲子去皮效果的主要影响因素有水射流压力、水射流倾角和加工速度(带轮直径),其主要评价指标有去皮率、损伤率、带帽头率、开边率、掉莲率。采用Design-Expert软件设计三因素三水平Box-Behnken响应面法试验,试验结果表明:对去皮率、损伤率以及带帽头率的影响程度从大到小均依次是水射流压力、水射流倾角、带轮直径;对开边率的影响程度从大到小是水射流倾角、水射流压力,而带轮直径对开边率的影响非常小;掉莲率几乎都在1%左右,与3个影响因素无关,可做进一步研究。
(3)利用Design-Expert软件的寻优功能对作业参数进行优化,优化后最佳作业参数分别为:水射流压力为0.7 MPa、水射流倾角为18°、带轮直径为68 mm,其指标预测值分别为:去皮率为91.16%、损伤率为0.96%、带帽头率为2.40%、开边率为0.04%。采用优化后的参数进行验证试验,得出去皮率为92.63%、损伤率为1.24%、带帽头率为2.72%、开边率为0.21%,各项指标的试验结果与理论预测结果的绝对误差均小于1.5%,验证了模型与所优化参数的合理性,优化后的鲜莲子去皮机性能满足作业要求。
猜你喜欢
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
传感器与微系统(2022年4期)2022-04-12 08:37:44
物流技术与应用(2021年7期)2021-08-11 02:44:14
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
科学与技术(2019年5期)2019-04-23 06:49:52
装备制造技术(2019年1期)2019-04-22 07:29:22
制造技术与机床(2019年4期)2019-04-04 12:21:18
现代机械(2018年5期)2018-11-13 10:06:16
建筑科技(2018年6期)2018-08-30 03:41:04
