
自动调节深度式果园双行开沟施肥机设计与试验
2021-02-01 11:14张宏建徐春保刘双喜张成福王金星
农业机械学报 2021年1期
张宏建 徐春保 刘双喜,3 江 浩 张成福 王金星,3
(1.山东农业大学机械与电子工程学院, 泰安 271018; 2.山东省农业装备智能化工程实验室, 泰安 271018;3.山东省园艺机械与装备重点实验室, 泰安 271018; 4.高密市益丰机械有限公司, 高密 261500)
0 引言
果树施肥是果树生产中的关键作业环节,施肥质量直接影响果树养分的吸收,合理施肥是保证果树丰产、稳产和增产的重要举措[1-2]。目前,国内果树施肥普遍存在重视化肥而忽视有机肥的现象,导致土壤板结和肥力下降,严重影响了果园生产能力的提高和生产体系的良性发展[3]。相关研究表明,有机肥与化肥混施比单施有机肥或化肥的效果显著,可以提高果实产量、单果质量及糖酸比,改善果实的外观品质[4-6]。我国果园开沟施肥作业主要依靠人工完成,其作业强度大、效率低、标准不稳定,机械化开沟施肥作业是解决此问题的关键,也是我国果园未来发展的趋势[7]。国外发达国家对果园施肥机械的研究起步较早,对农机设计和农艺要求相结合的概念更为完善,而且标准化建园、规范化管理的程度较高,现阶段其施肥机械产品更专业化、标准化和系列化[8]。国外开沟施肥机经历了铧式犁、旋转式开沟机、链式开沟机的发展过程[9-13]。国内果园开沟施肥机械研制起步较晚,主要采用旋转式开沟施肥机作业[14]。王京风[15]研制了果园微型开沟施肥机,该机高度低、通过性好,可在狭窄的果园实现低速开沟作业;何义川等[16]研制了2FK-40型果园开沟施肥机,该机与拖拉机配套使用,可一次完成偏置开沟、施肥、覆土作业;王攀[17]研制了立式果园开沟施肥机,以组合立式旋转刀具搭配清沟犁为开沟器,同时实现开沟、施肥两项作业;赵明辉[18]研制了果园立式旋耕开沟施肥机,该机可实现曲线开沟、对靶施肥。
综合国内外研究成果可知,国内开沟施肥机多为单行作业、单施有机肥或化肥,且缺乏开沟深度智能调节装置,开沟施肥效率低、效果差;国外开沟施肥装备较为先进,但多采用单工序作业,其价格昂贵、专用性强,且与国内果园栽植标准存在一定差异,不适用于我国果园作业。为此,本文设计一种开沟深度可自动调节的果园双行开沟施肥机,可自动混施有机肥和化肥,以提高果树开沟施肥的效率和施肥效果。
1 整机结构与工作原理
1.1 果园开沟施肥农艺要求
目前,渤海湾、西北黄土高原等地区新建的现代化果园多采用矮砧密植的种植模式,如图1所示。现代化果园行距Lr在3.5~4.0 m之间,株距Lc在1~1.2 m之间,密度为0.24~0.33株/m2。果树多采用高纺锤树形的修剪方式,行间作业空间大,适宜机械作业[19]。为了促进果树的长梢、开花及结果,一般秋季在果树树冠外缘的正下方进行开沟深施基肥作业,其中开沟宽度w在20~40 cm,开沟深度h在20~40 cm,有机肥施肥量0.75~2.25 kg/m2,化肥施肥量0.52~0.67 kg/m2[20-21]。
1.2 整机结构
为提高作业效率,结合果树的矮砧密植种植模式,设计果园双行开沟施肥机,整机结构如图2所示,主要由机架、肥箱、开沟装置、排肥装置、控制系统等构成,主要技术参数如表1所示。为减少粉尘等外界环境因素对系统的影响,将控制系统集成于控制箱中,并在作业时将其安装在驾驶室内。
1.3 工作原理
开沟施肥作业前,根据果园种植行距及果树生长状态,通过控制系统调整左、右开沟装置之间的开沟距离及排肥口的开度,并预设开沟深度范围。开沟施肥作业时,果园双行开沟施肥机在拖拉机的牵引下前进,开沟刀切削入土并将土抛起,有机肥、化肥分别由排肥刮板及肥料螺旋输送器排出,经输肥传送带和导肥板落入所开沟槽,同时覆土罩壳将开沟刀抛起的土挡住,使其回落至所开沟槽内,实现开沟、有机肥与化肥混施、覆土一体化作业。

表1 主要技术参数Tab.1 Main technical parameters
拖拉机的部分动力传递至输肥传动箱,带动输肥传送带转动,实现输肥作业,其他动力传递至主传动箱。主传动箱的部分动力由输出轴Ⅰ、Ⅱ传递至开沟传动箱,带动开沟刀旋转,实现开沟作业;其他动力由主传动箱输出轴Ⅲ传递至排肥传动箱,带动排肥刮板及肥料螺旋输送器转动,实现排肥作业。动力传动路线如图3所示。
2 关键部件设计
2.1 开沟装置
开沟装置主要由开沟传动箱、开沟刀盘及开沟刀构成,如图4所示。开沟装置采用双圆盘式开沟器,以反转的方式开沟作业,形成横截面呈梯形的沟槽。开沟刀为杯型弯刀,通过螺栓交错安装在开沟刀盘的两侧,每侧4把开沟刀,沿刀盘圆周方向呈90°均匀排列。
刀盘直径是圆盘式开沟机的一项重要设计参数,它对开沟机的抛土、功耗、传动形式及结构尺寸等有重要影响[22]。刀盘直径影响开沟刀的切削弧长,进而影响切土功耗与铣切功耗。刀盘直径与切削弧长关系式为
(1)
式中B——切削弧长,mm
θ——土壤的撕裂线倾角,(°)
R0——刀盘半径,mm
D0——刀盘直径,mm
δ0——开沟刀工作长度,mm
由式(1)可知,切削弧长B与刀盘直径D0成正比。刀盘直径增大,切削弧长增大,开沟刀切土轮廓曲率减小,切土功耗降低,但铣切功耗增加。合适的刀盘直径可以降低切土功耗和铣切功耗。刀盘直径与理论开沟深度关系式为
D0+2δ0=(1.2~1.4)H
(2)
式中H——理论开沟深度,mm
根据果园开沟施肥的农艺要求,预设开沟深度为400 mm,考虑地面平整度的影响,设计理论开沟深度H为420 mm,开沟刀工作长度δ0为122 mm。根据式(2)确定刀盘直径D0的取值范围为260~344 mm。
刀盘直径影响开沟机作业时的扭矩不均匀系数[23-24]。刀盘的转动惯量I和扭矩不均匀系数μ关系式为
I=ΔE/(μω)
(3)
式中 ΔE——动能变化量,J
ω——刀盘角速度,rad/s
由于旋转部件的质量主要集中在刀盘和开沟刀上,故将刀盘定义为飞轮机构,转动惯量I为
(4)
式中Mp——刀盘质量,kg
由式(3)、(4)可知,刀盘直径D0与转动惯量I成正比,与扭矩不均匀系数μ成反比。增大刀盘直径,可减小开沟作业过程中扭矩的变化量,降低整机功耗,提高作业质量。结合刀盘直径对扭矩不均匀系数和结构尺寸的影响,在刀盘直径的取值范围内,适当增大刀盘直径,确定开沟刀盘直径D0为320 mm。
开沟装置中开沟部件的运动参数影响整机作业性能,尤其是开沟刀的切土速度对开沟刀铣切及抛撒土壤形状产生重要影响。开沟刀的运动方式是随着整机前进的直线运动和绕刀盘轴线转动的合成运动。设开沟刀片端点运动轨迹上任一点的坐标为F(x,y),取开沟刀盘旋转中心O为坐标原点,机具前进方向为x轴正方向,垂直向下为y轴正方向,如图5所示。
点F(x,y)的运动轨迹方程为
(5)
式中R1——开沟刀端点转动半径,m
vm——拖拉机前进速度,m/s
t——开沟刀运动时间,s
对式(5)中的运动时间t求导,得到点F(x,y)在x、y轴方向的速度为
(6)
式中vx——F在x方向分速度,m/s
vy——F在y方向分速度,m/s
开沟刀片端点的绝对速度为
(7)
vFmin=ωR1-vm
(8)
(9)
(10)
式中vFmin——开沟刀最小速度,m/s
n0——开沟刀转速,r/min
双圆盘式开沟装置在破土、刨土的过程中,其刀片端点的绝对速度不低于6.5 m/s[25]。整个开沟刀盘圆周速度相等,以圆周上任一点为基准,根据式(10)得到开沟刀最小理论转速为230 r/min。
2.2 化肥排肥装置
化肥排肥装置采用螺旋式排肥器,主要由化肥箱、进肥口、排肥轴、排肥螺旋和排肥槽构成,如图6所示。其中,左、右两侧的排肥螺旋结构均为对称式设计。
螺旋式排肥器的单圈排肥量是衡量排肥装置排肥性能的一个重要指标,其大小直接决定了排肥装置的总排肥量、排肥均匀性及排肥稳定性[26]。在不考虑轴向阻力及转速影响时,单圈排肥量q为
(11)
(12)
ht=(D1-d1)/2
(13)
式中D1——螺旋式排肥器外径,mm
d1——螺旋式排肥器内径,mm
S1——螺距,mm
bt——螺牙平均厚度,mm
ht——螺牙深度,mm
Lt——螺牙平均长度,mm
ρc——化肥容重,g/mm3
φ——螺旋式排肥器填充系数
由式(11)可知,螺旋式排肥器的单圈排肥量q与D1、d1、S1、bt、ρc、φ有关。通过改变螺旋式排肥器D1、d1、S1等参数可以调整单圈排肥量。在整个排肥过程中,螺旋式排肥器的外径与排肥量存在关系
(14)
(15)
式中Qc——化肥排肥量,t/h
A——物料综合特性系数
K——物料综合系数
c——螺距与直径的比例系数
λ——物料的单位容积质量,t/m3
ε——倾斜输送系数
施肥机在连续施肥作业的情况下,施肥量为
Q=vmg/s
(16)
式中Q——施肥量,t/h
g——前进一定距离的施肥量,t
s——前进距离,m
根据果树开沟施肥的农艺要求,果树所需化肥取0.60 kg/m2,株数取0.30株/m2,单株果树所需化肥为2 kg,株距为1~1.2 m,单株果树单侧化肥施肥量取1 kg/m,施肥机的前进速度取800 m/h,根据式(16)得到施肥量Q为0.8 t/h,即Qc为0.8 t/h。结合化肥的特性参数,确定化肥的填充系数φ为0.25,综合系数K为0.063 2,综合特性系数A为28,单位容积质量λ为1.25 t/m3,螺距与直径的比例系数c为1,倾斜输送系数ε为1。将各参数代入式(14)、(15),得到排肥螺旋的外径为92 mm。由于螺旋叶片的直径通常设计成标准系列,最终确定螺旋叶片外径D1为100 mm,螺距S1=0.8D1=80 mm,排肥螺旋的内径d1=0.3D1=30 mm,螺牙平均厚度bt为2 mm,将D1、d1、S1、bt、S1、φ等代入式(11)~(13),得到单圈排肥量为173.8 g。
排肥装置在输送化肥过程中,化肥由于受旋转螺旋的影响,其运动并非是单纯的沿轴线作直线运动,而是在一复合运动中沿螺旋轴运动。设螺旋输送器的螺旋为标准的等螺距等直径的单头螺旋,当螺旋面的升角为展开的状态时,螺旋线用一条斜直线来表示。以距离螺旋轴线e处的物料颗粒E作为研究对象,进行运动分析。当螺旋绕轴回转时,对物料颗粒E的实际速度ve进行分解,得到E自O点移动的轴向速度v1和圆周速度v2,如图7所示。其中,v1促进化肥的轴向输送,而v2阻碍化肥的轴向输送。由于v2在螺旋叶片的半径范围内是变化的,导致化肥在移动过程中发生相对滑动,在排肥螺旋外层产生一个附加的肥料流。当螺旋轴超过一定转速时,附加的肥料流显著影响肥料运动,肥料作垂直于输送方向的翻滚,而不作轴向的输送运动。在满足施肥量的前提下,此时旋转轴转速与排肥螺旋外径、施肥量之间存在关系
(17)
(18)
根据式(17)、(18),确定旋转轴的转速范围为55 r/min≤n≤88 r/min。综合施肥量、螺旋式排肥器外径和肥料特性参数,确定旋转轴转速n为70 r/min。
2.3 有机肥排肥装置
有机肥排肥装置主要由排肥链轮、O型链及排肥刮板构成,如图8所示。O型链平行安装在排肥链轮上,2条O型链之间焊接排肥刮板,且排肥刮板沿O型链转动方向均匀、等间距分布。
刮板式排肥器是连续排肥设备,输送能力是其最重要的工作参数[27]。刮板式排肥器的排肥量Qo为
Qo=3 600F0vcρoφ=3 600B1hbηkβvcρo
(19)
式中vc——链条运动速度,m/s
B1——机槽宽度,m
F0——有机肥内摩擦力
hb——料槽工作部分高度,m
ρo——物料堆积密度,t/m3
kβ——倾角系数η——输送效率
由式(19)可知,在其他参数确定的情况下,链条运动速度越大,排肥量Qo越大。但随着vc增大,输送效率η降低,能耗增加,链条磨损加剧。正常作业时,vc的取值范围为0.08~1.0 m/s,结合肥料特性参数,确定链条运动速度vc为0.1 m/s[28]。根据果树开沟施肥的农艺要求,果树所需有机肥取2.25 kg/m2,株数取0.30株/m2,单株果树所需有机肥为7.5 kg,株距为1~1.2 m,单株果树单侧有机肥施肥量取3.75 kg/m,施肥机的行驶速度取800 m/h,根据式(16)得到施肥量为3.0 t/h。有机肥排肥装置水平布置,倾角系数kβ为1.0,机槽宽度B1为0.6 m,输送效率为0.5,有机肥堆积密度ρo为0.8 t/m3,将各参数代入式(19),确定排肥口高度不小于35 mm。根据排肥口高度,选择边宽为30 mm等边角钢作为排肥刮板。有机肥排肥装置工作时,两相邻排肥刮板及其间有机肥构成牵引层。牵引层肥料受到刮板在运动方向的推力,在肥箱底部以一定速度滑动,同时又通过层间的内摩擦作用而带动上层有机肥运动。当上层肥料高度小于其临界值时,上层肥料全部随牵引层及刮板一起运动。为保证上层肥料全部顺利排出,有机肥排肥口的高度应小于其临界值,取两相邻刮板间的上层肥料作为一个单元体进行受力分析,如图9所示。
上层肥料受到内摩擦力f1和外摩擦力f2的作用。上层肥料与牵引层之间产生内摩擦力f1使肥料运动,肥料与机槽两侧壁之间产生外摩擦力f2阻碍肥料运动,其值分别为
f1=μ1N1=μ1abhaδ
(20)
(21)
式中μ1——内摩擦因数
N1——两层肥料间的压力,N
μ2——外摩擦因数
N2——单侧压力,N
ha——上层肥料高度,m
δ——散密度,t/m3
γ——侧压系数a——刮板间距,m
b——刮板长度,m
当牵引层肥料对其上层肥料的内摩擦力不小于上层肥料与机槽壁之间的外摩擦力,即f1≥f2时,上层肥料随刮板向前运动,由此可得
ha≤μ1b/(μ2γ)
(22)
根据文献[29],确定内摩擦因数μ1为0.16、外摩擦因数μ2为0.54、侧压系数γ为0.43、刮板长度b为600 mm,根据式(22),结合有机肥的肥料特性确定ha≤400 mm,在满足施肥量的前提下,排肥口高度设计为100 mm。
3 控制系统设计
3.1 开沟深度自动调节装置设计
开沟刀自入土切削至沟底,开沟深度调节过程如图10所示。
开沟器由位置①旋转至位置②的过程中,设输入轴中心为M,开沟刀盘中心为N,MN两点之间的距离为L。当开沟器在位置①时,开沟刀刚接触地面,输入轴中心M距地面的高度为H1,M距开沟刀盘中心N的垂直距离为h1,MN与过输入轴中心M的水平线P所呈夹角为θ1;当开沟器旋转至位置②时,输入轴中心M与沟底的距离为H2,M与开沟刀盘中心N的垂直距离为h2,MN与过输入轴中心M的水平线P所呈夹角为θ2,开沟深度为
hd=H2-H1
(23)
由图10可知,开沟器由位置①旋转至位置②的过程中,H1与h1、r、L、θ1以及H2与h2、r、L、θ2存在以下几何关系
(24)
式中r——N与开沟刀切土点的垂直距离,mm
将式(24)代入式(23)可得开沟深度的动态函数为
hd=H2-H1=h2-h1=L(sinθ2-sinθ1)
(25)
果园双行开沟施肥机的开沟深度自动调节原理如图11所示。首先,根据果树树龄及营养状态,结合园艺要求设定开沟深度范围。其次,当开沟刀刚接触地面时,角度传感器返回倾角θ1;继续开沟作业的过程中,角度传感器实时返回倾角θ2,单片机根据式(25)计算实时开沟深度。最后,单片机判断实时开沟深度是否在预设开沟深度范围内,进而通过继电器、电磁阀控制液压缸的伸缩,实现开沟深度的增大或减小。
3.2 控制系统软硬件设计
控制系统作为果园双行开沟施肥机的控制核心,主要由硬件和软件组成,实现角度和位移传感器的信息采集、通信、存储,对执行机构实时控制以及人机交互界面显示,控制系统如图12所示。控制系统程序采用C语言在Keil uVision5开发环境中编写,由主程序调用若干相应的模块子程序实现整个开沟施肥的控制过程。控制系统以STM32F103系列单片机为核心元件,主要由电源、稳压模块、传感器模块、执行模块、继电器模块、通讯模块及人机交互模块等组成,通过485通讯传输作业数据。电源为风帆有限责任公司生产的24 V、36 A·h铅蓄电池,为整个控制系统独立供电,通过稳压模块分配到不同的用电元件,避免外在因素干扰。传感器模块由角度传感器和位移传感器构成,其中左、右角度传感器选用青岛有田测控技术有限公司生产的CQ-400D型动态抗震型倾角传感器,工作电压为DC12V,单轴测量范围为±90°,测量精度为0.1°,用于实时测量开沟深度;左、右位移传感器选用深圳淞研精工科技有限公司生产的KTC-300型拉杆式直线位移传感器,工作电压为DC12V,量程0~300 mm,线性精度为0.01 mm,用于测量开沟距离。执行模块由电动推杆和液压缸构成,其中电动推杆分别选用厦门一抠能源技术有限公司生产的tg型和wxtg型电动推杆,工作电压为DC12V,行程分别为200、100 mm,用于调节有机肥箱和化肥箱的开口,控制施肥量。人机交互模块主要由机载显示器构成,用于显示实时指标信息和监测作业状态。
3.3 控制终端软件设计
本文设计的人机交互界面主要由登录系统界面、参数设定界面及工作监测界面构成,实时显示指标信息和监测作业状态,如图13所示。首先开启触摸屏,进入登录系统界面;根据果园种植行距及果树生长状态,在参数设定界面调整左、右开沟装置之间的开沟距离及排肥口的开度,并预设开沟深度范围,点击启动按钮进入工作监测界面;开沟施肥作业时,控制系统根据预设开沟深度范围自动调节开沟深度,工作监测界面实时显示当前开沟深度,点击OFF按钮停止作业。
4 性能试验
4.1 试验条件及方法
性能试验于2019年12月在高密市益丰机械有限公司试验基地进行,天气晴,气温-4~3℃,西南风,风速小于2 km/h,空气相对湿度64%,试验地土质为壤土,绝对含水率16.7%,地面相对平整,面积约650 m2。试验所用化肥为史丹利农业集团股份有限公司生产的球状复合肥,含水率1.12%,颗粒平均直径为4.19 mm;所用有机肥分别为潍坊和信生物科技有限公司生产的球状有机肥、柱状有机肥和粉状有机肥,其中球状有机肥有机质质量分数大于等于45%、含水率8.25%,柱状有机肥有机质质量分数大于等于75%、含水率16.23%,粉状有机肥有机质质量分数大于等于50%、含水率22.74%。测试方法及指标参照GB/T 5262—2008《农业机械试验条件测定方法的一般规定》及NY/T 740—2003、NY/T 1003—2006规定的开沟、施肥机械作业质量评价试验方法。图14为果园双行开沟施肥机性能试验场景。
4.2 开沟试验
测试果园双行开沟施肥机的3个开沟作业行程,每一行程双行作业,单行工作长度为50 m,其中,测定区长度为30 m,两端预备区长度为10 m,沿行程方向每行等间距选取5个点作为测量点进行测试,共测30处。在不同的开沟行程中,通过控制系统预设左、右两侧沟的开沟深度范围。测试前清除沟底及抛落在沟旁的土块,然后在原地表与两沟壁交线之间放一直尺,测量沟底中心点到直尺的距离作为测量点的开沟深度。单个作业行程下,所有测量点测试完成后,计算平均开沟深度及开沟深度稳定性系数,测试结果如表2所示,各行程下不同测量点的测试结果如图15所示。

表2 开沟试验结果Tab.2 Ditching test results
开沟试验结果表明,不同行程下,果园双行开沟施肥机左、右两侧平均开沟深度均在预设范围之内;同一行程下,左、右两侧开沟深度差异不大,最大不超过18 mm;在所有行程中,开沟深度稳定性系数较高,大于等于94.76%,评价指标满足相关规定对开沟机械的作业要求。
4.3 施肥试验
测试果园双行开沟施肥机的3个施肥作业行程,每一行程双行作业,测定区长度和预备区长度与开沟试验一致,沿行程方向每行按10 cm长度连续等分为30段作为测量区域进行测试,共测180处。在不同的施肥作业行程中,有机肥箱分别装颗粒有机肥、柱状有机肥、粉状有机肥,化肥箱均装颗粒复合肥,且肥箱中的肥料容量均大于肥箱总容量的50%。试验时,在预备区将开沟装置升起,校准整机进入工作状态,后以正常作业速度通过测定区。分别收集掉落在各小段内的肥料,通过标准检验筛将有机肥及化肥分离,并通过电子天平称量。单个作业行程下,所有测量区域测试完成后,再计算有机肥、化肥及整体的施肥均匀性系数,测试结果如表3所示,各行程下不同测量点的测试结果如图16所示。
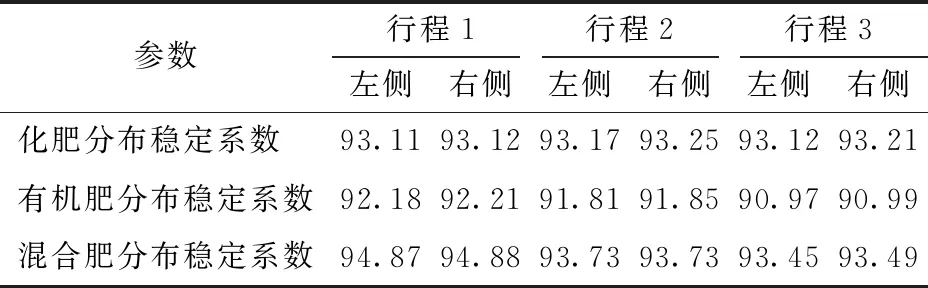
表3 施肥试验结果Tab.3 Fertilization test results %
施肥试验结果表明,同一行程下,左、右两侧施肥量差异不大,最大不超过20 g;肥料分布稳定性较高,其中有机肥分布稳定系数90.97%,化肥分布稳定系数93.11%,混合肥分布稳定系数93.45%,评价指标满足相关规定对施肥机械的作业要求。
5 田间试验
试验地点:2020年1月,在山东省临沂市沂水恒和农场20 hm2苹果试验园试验,田间试验如图17所示。
试验条件:天气晴,气温-8~2℃,风速小于2 km/h,果树种植行距4 m,株距1.5 m,试验园的土地平整,土壤为沙壤土,含水率为12.1%。
试验材料:化肥为史丹利农业集团股份有限公司生产的球状复合肥;有机肥为潍坊和信生物科技有限公司生产的球状有机肥。
试验参数:拖拉机前进速度为1.0 m/s,左、右两侧开沟深度范围均设定为(300±15)mm,有机肥排肥口宽度为5 cm,化肥箱开口宽度为5 cm。
进行3个行程的重复试验验证,试验结果如表4所示。试验结果表明:果园双行开沟施肥机的开沟深度稳定系数最大值为96.18%,最小值为95.18%;有机肥分布稳定系数最大值为91.98%,最小值为91.44%;化肥分布稳定系数最大值为92.80%,最小值为92.09%;混合肥分布稳定系数最大值为94.12%,最小值为93.70%。评价指标符合果树开沟施肥的技术要求。
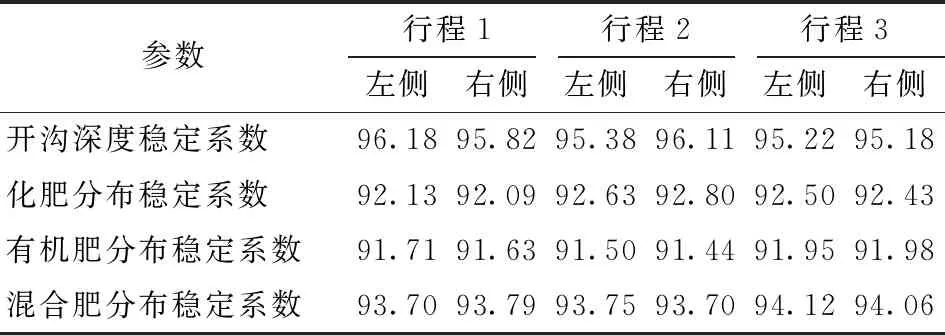
表4 田间试验结果Tab.4 Field test results %
6 结论
(1)设计了一种开沟深度可自动调节的果园双行开沟施肥机,可一次完成果园开沟、有机肥与化肥混施、覆土作业。通过理论分析对开沟装置、排肥装置和开沟深度自动调节装置等关键部件进行设计,搭建基于STM32F103的控制系统,实现了开沟深度的自动调节,提高了果树开沟施肥效率,解决了果树无法混施有机肥与化肥的难题。
(2)性能试验表明,果园双行开沟施肥机各工作部件运行稳定,开沟深度一致性较好,开沟深度稳定系数大于等于94.76%;田间试验表明,各肥料颗粒分布均匀,其中有机肥分布稳定系数大于等于91.44%,化肥分布稳定系数大于等于92.09%,混合肥分布稳定系数大于等于93.70%,满足果园生产要求。
猜你喜欢
中国化肥信息(2022年9期)2022-11-25
矿山机械(2022年10期)2022-10-20
科学技术与工程(2022年25期)2022-10-13
农业科技与装备(2022年2期)2022-07-13
今日农业(2021年19期)2022-01-12
商品与质量(2021年42期)2021-12-03
今日农业(2021年8期)2021-11-28
农业与技术(2021年21期)2021-11-17
果农之友(2021年4期)2021-06-29
今日农业(2021年4期)2021-06-09
