基于UDS 协议的并线辅助系统动态校准
2021-01-31 13:45冯世杰袁东磊刘鹏飞
汽车电器 2021年1期
冯世杰,袁东磊,刘鹏飞
(海马汽车有限公司,河南 郑州 450016)
对于日常开车的驾驶员来说,由于车辆本身的缘故,行车过程中的盲区是无法消除的,并线辅助系统[1]通过安装的电子控制系统,探测侧后方驶来的最远70m处的车辆,并计算目标的运动速度、距离、方位等信息,以此判断当前进行变道操作时是否存在潜在的碰撞风险,并通过指示灯输出报警信息,提醒驾驶员是否可以安全并线,从而提高驾驶行车的安全性。并线辅助系统作为一项汽车智能安全技术,不仅是车辆后方检测的主要功能系统,也是对车内、外后视镜的有效补充。
1 并线辅助系统功能介绍
并线辅助系统 (LCAS Line Change Assistant System)组成包括左/右雷达传感器、左/右雷达安装支架、左/右指示灯以及系统主线束,实现盲点监测[2](BSD Blind Spot Detection) 和车辆靠近预警 (CVW Close Vehicle Warning) 两个功能。系统的线束接口包括CAN总线、电源、搭铁,通过CAN总线进行信息交互,可以获取当前的功能开关状态、车速、挡位、转向、门状态等信息。
BSD功能检测报警区域为车辆左右两侧,横向从0.5~4.5m,纵向从车辆B柱位置到车尾后方的8m区域。当有速度大于5km/h的运动目标位于盲区,就会激活BSD一级报警,车辆左侧 (右侧) 的目标触发左侧 (右侧) 的报警指示;在BSD一级报警状态下,系统检测到本车同侧转向灯亮的信号,则会激活该侧二级报警,进行声音提醒及其他提醒;如果目标车被超越,且相对速度大于10km/h,系统则认为没有碰撞风险,解除此目标报警。CVW功能检测预警的左右横向区域与BSD功能的一致,纵向是从车尾后方8m到车尾后方70m的区域。当目标靠近本车,且预碰撞时间小于3.5s,就会触发CVW一级预警,车辆左侧 (右侧) 的目标触发左侧(右侧) 的预警;在CVW一级预警状态下,系统检测到本车同侧转向灯亮的信号,则会启动该侧二级报警,进行声音提醒及其他提醒;如果本车超越目标车,且相对速度大于10km/h,解除此目标报警。
2 并线辅助系统产线校准方案
并线辅助系统雷达安装在车辆后侧的包围内,因车身结构误差,支架的误差以及包围材料、形状、安装高度等多种因素的影响,势必会引起系统对目标位置测算的误差偏大,使雷达的性能表现达不到设定期望,出现误报、漏报等现象。为提高并线辅助系统性能的稳定性,达到更好的用户驾驶体验,需要在车辆下线后进行雷达的校准工作。
并线辅助系统中雷达的产线校准有3个方面的需求,包括雷达信号模拟器、校准触发的指令和校准场地的布置。雷达模拟器主要作用是模拟实际的运动目标;场地应选择至少长15m、宽8m的空旷区域,尽量不要有柱头,并保证墙面平整光滑;音响主机上设置有并线辅助雷达校准的软按键,软按键触发后,音响主机发送雷达校准CAN通信指令,雷达接收到校准指令后进入校准状态开始校准,雷达校准过程的数据处理流程如图1所示。
若实际目标信息不满足误差范围,则进行校准弧度值的迭代计算,然后将计算的弧度值发送到雷达中;若实际目标信息满足误差范围,则结束校准。
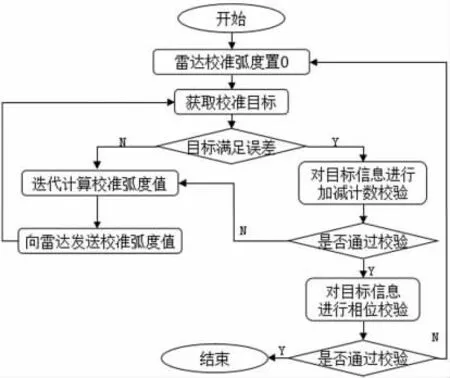
图1 雷达校准流程
3 并线辅助系统售后动态校准设计
市场4S服务店及维修机构由于场地或设备条件的限制,采用主机厂生产线体的雷达校准方案是不现实的,必须设计出简化实用的售后校准方案来满足市场售后的需求。售后诊断仪是服务维修店必备的维修设备,而售后诊断仪是基于UDS诊断服务协议[3](Unified Diagnostic Services) 开发的,所以基于UDS服务协议设计雷达校准的网络通信指令,使车辆在行驶的过程中采集路边静止的目标信息,并经过统计分析后自动计算出雷达的安装角度,完成车辆并线辅助系统的动态校准。并线辅助雷达动态校准流程如图2所示。

图2 雷达动态校准流程
并线辅助雷达校准的网络通信指令如表1所示。
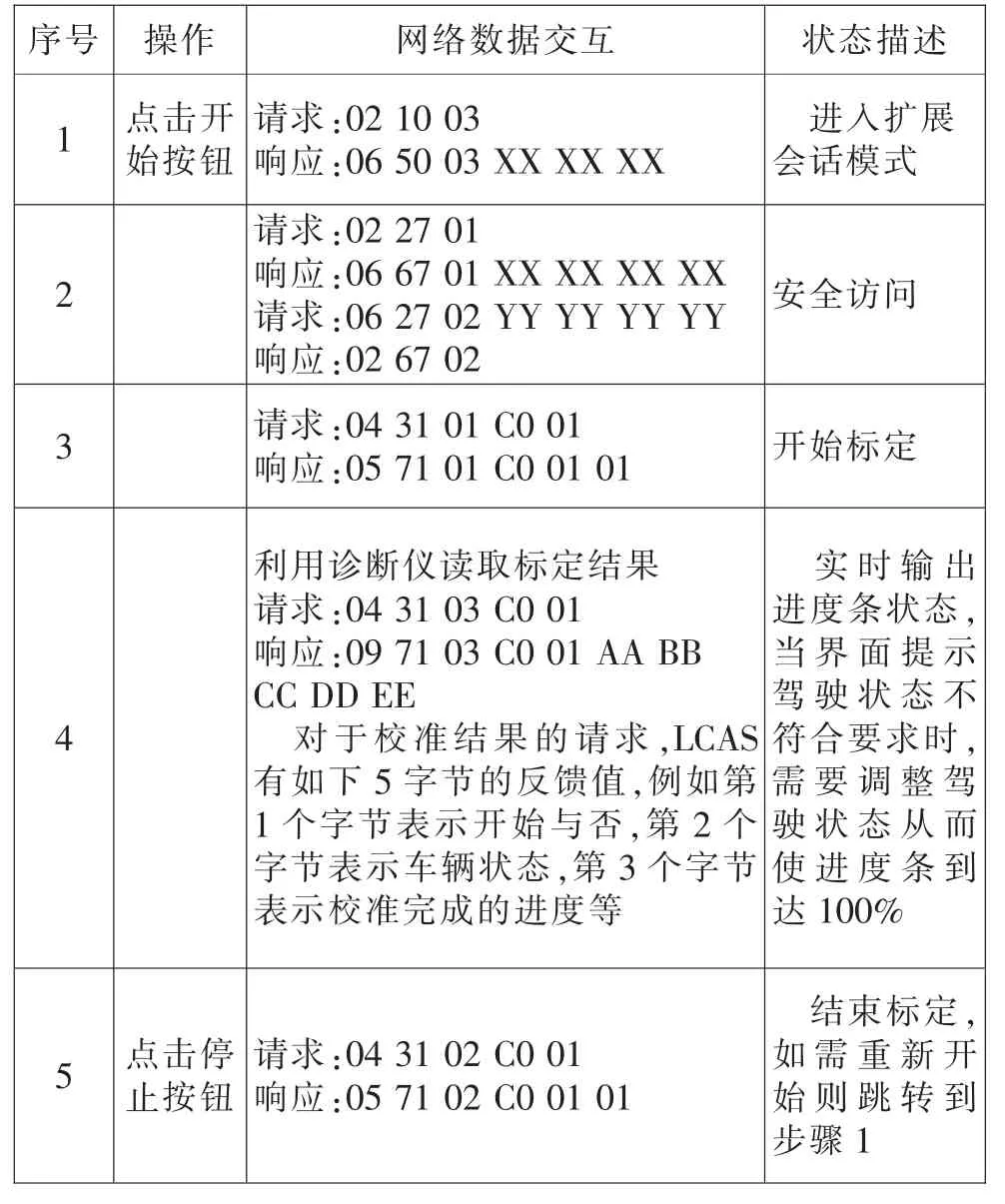
表1 雷达校准的网络通信交互表
4 应用与总结
基于上述并线辅助雷达校准的网络通信指令进行售后诊断仪软件设计,并完成实车雷达校准测试,软件校准界面如图3所示。

图3 雷达动态校准界面显示
通过测试验证完成并线辅助系统的雷达动态校准,有效解决并线辅助雷达售后校准难的问题,也为之后车载雷达校准方案设计提供参考。
猜你喜欢
北京航空航天大学学报(2022年2期)2022-03-08
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
知识就是力量(2018年8期)2018-08-16
课外生活(小学1-3年级)(2018年4期)2018-05-26
小学生·多元智能大王(2015年3期)2015-05-25
现代电子技术(2014年21期)2014-11-07
中华少年(2009年9期)2009-09-14