基于稀疏信号处理的雷达成像算法研究
2021-01-30 05:30陈楚涵
电子技术与软件工程 2020年22期
陈楚涵
(中国民用航空西南地区空中交通管理局云南分局 云南省昆明市 650000)
1 引言
由于雷达在现代战争中的大量使用,促使人们对雷达成像开始追求更高的分辨率。随着宽带微波技术的出现,雷达在多维信息量的处理方面有了很大的改善。要想实现成像高分辨,就必须在进行回波信号的脉冲压缩的同时利用合成天线孔径[1]。根据雷达与目标间相对运动形成的合成孔径,成像雷达包含合成孔径雷达与逆合成孔径雷达。二者的区别在于合成孔径的形成原因,以雷达的运动为准,雷达动为正,即SAR,雷达不动为逆,即ISAR。
Carl Wiley 提出的改善角分辨率方法,运用了频率的差异进行分析,标志着合成孔径开始出现[2]。数字化处理SAR 的方法于1970年开始运用于实践中,不久,运用数字处理SAR 的系统问世[3]。进入21世纪,国内的CS 理论应用于处理雷达信号的探索已经逐步开始,中科院电子学研究所携手空间科学与应用研究中心开始着手压缩感知基础理论、二维雷达成像算法、超宽带穿墙雷达、电磁逆散射和探地雷达等方面的研究。谢晓春等人提起的CS 方法应用于距离向与传统成像算法[4],是一种在对复基带雷达回波信号模型的稀疏性分析后建立了二维成像方案。尽管CS 理论已处于相对完善水平,但应用于解决现实雷达问题的方法却不足以站稳脚跟,而且当下实时信号处理系统处理复杂的求解算法的能力有限。为让基于CS 的雷达稀疏信号的处理技术真正能在现实中推广,其存在问题更要求我们不断进步发展。
针对目前雷达成像在高精度和多维度要求下,传统雷达成像算法图像采样效率低、图像恢复速度慢且图像恢复质量差的问题,本文提出一种改进幅度稀疏表示雷达成像算法。以合成孔径雷达(SAR)模型为基础,结合优化的幅度稀疏表示重建算法进行雷达成像算法建模,在此模型下对一维SAR 成像和二维SAR 成像进行了研究,提出了一些可能的解决方案并给出了实验结果。
2 相关概念
将雷达成像模型表示成下列形式:

式中,s 是一个MN×1 的向量,由信号构成;A 是一个MN×PQ 的矩阵,由目标到信号的映射关系构成;g 是一个PQ×1 的向量,由场景反射系数构成。
在参照噪声干扰的情况下,由式(1),雷达成像的观测模型可以表示为

式中,n 为MN×1 的噪声向量。
式(2)是采用LFM 信号的雷达观测模型。因为使用压缩感知雷达成像和稀疏信息的正则化方法基本都会牵扯到随机采样,所以,实际硬件能否实现随机采样仍是必考虑项。我们假想观测几何与信号形式为已知量,即A 是已知的,s 是得到的观测信号,g 是待估计场景。由于式(2)是一个线性模型,则得出场景 的最小二乘估计为:

式中,C 是噪声n 的协方差矩阵并且有:

对于线性观测模型式(2)来说,高斯白噪声条件下用最佳估计来表示最小二乘估计。
在场景网格点数大于信号点数的情况下,AHA 矩阵不可逆,便考虑能否采取加大采样点数的方法来使MN>PQ,从而使得AHA 可逆。由于实际情况的局限性,不得不采用有限的观测角和有限的带宽观测场景,一般采用更密间隔进行采样的方式来得到更多的采样点数。然而在密集的采样条件下会造成A 中出现相邻的列基本无差异的情况,即相邻的列具有很大的相关性。因此就算此时AHA 可逆,相关求逆运算所得的值也并不稳定[4]。即使以密集采样来增加测量数据点数,最小二乘法一般也是病态的。
考虑最小二乘法,得出不稳定或是不可逆的是(AHA)-1。考虑在(AHA)-1AHs 的左边乘上AHA,从而抵消(AHA)-1,避免对其运算导致的不稳定性。依照此方法来推出匹配滤波方法[5],结果如下式:

式(5)可以看成在最佳估计的左边乘上了(AHA)。(AHA)表示sin c响应的矩阵,等同得到最佳估计结果以后再卷积上该sin c响应,由此让其成像结果获得相关的旁瓣与主瓣宽度。换个角度也能论证旁瓣与匹配滤波的分辨率。在式(5)中,一个理想点目标的回波s经过AH相乘后,所得的值为sin c 函数。匹配滤波方法的分辨率由此sin c 函数来确定。在SAR 成像方法中,对应距离的分辨率为c/(2B),方位分辨率为其中c 为光速,B 为信号带宽,λ 为信号波长,θ1和θ2为观测区间两端的观测角。必须要提到的是,因为式(5)被表示成了矩阵的形式,其与SAR 中常见的成像算法形式存在差异。
对于最小二乘估计算法,因为其模型中毫无先验信息,且测量数据信息量也不够,导致其估计结果中存在病态部分。所以计划运用新增先验信息的办法让其变为良态问题,正则化方法也是此类方法之一[6]。具体改进为:在原模型的基础上增加约束

式中,λ 为正则化系数,L(g)为增加的代价函数。为了让新增限制条件后取到的值更加接近实际值,新增的限制条件要与实际情况相符。
这里的另一个问题是如何选取L(g),典型的做法是令:

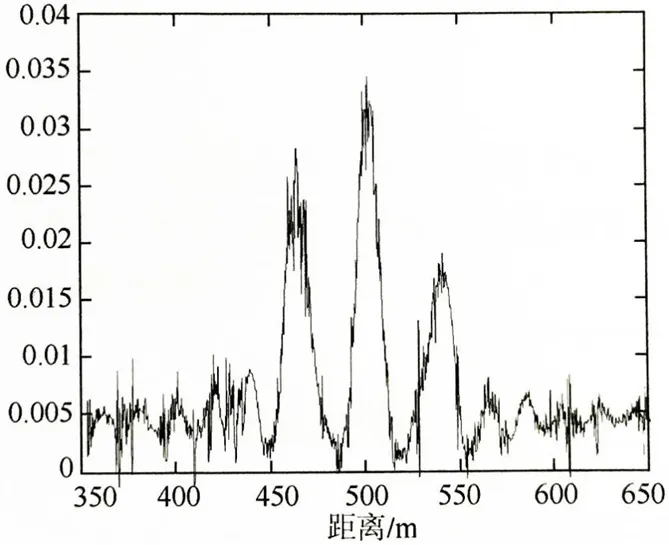
图1:现有幅度稀疏表示重建结果
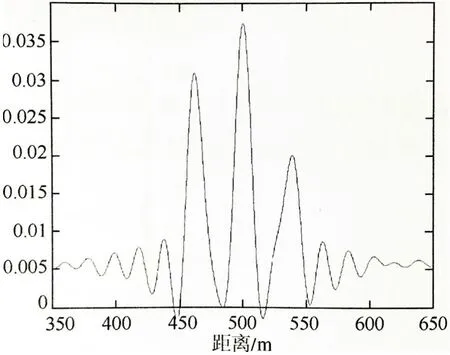
图2:改进幅度稀疏表示重建结果
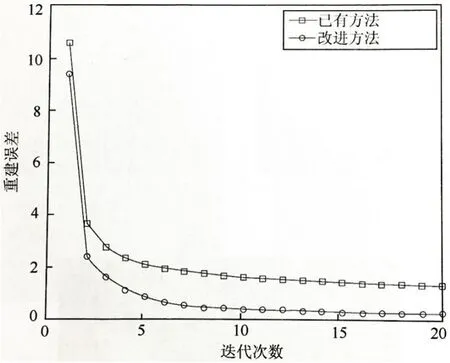
图3:算法均方误差比较
式中,||·||P表示 范数,即:

3 改进幅度稀疏表示的正则化雷达成像算法
前文给出了图像稀疏表示的概念,图像信号的稀疏表示主要为了便于进行存储传输,由于在雷达成像中并不能保证观测对象是直接稀疏的,因此准确图像信号的稀疏重建需要具备先验限制。
为了准确重建稀疏信号,Tao 与Candes 验证了测量矩阵A 必须满足约束等距性(restricted isometry property,RIP)条件[7][8]。如果存在一个常量,使得:

3.1 幅度稀疏表示的正则化雷达成像
在传统压缩感知SAR 成像稀疏重建方法中,一般来说会设置雷达场景直接稀疏,则场景g 可以通过如下稀疏重建得到:



式中,矩阵 包含了稀疏表示的基,α 是稀疏系数。
把g 表示成幅度和相位后,SAR 观测模型可改写为:

算法1:现有幅度稀疏表示重建算法
初始化:用传统的匹配滤波方式得到的结果作为g 的初始值,也就得到了P 和α 的初始值。步骤1:根据P,通过下式估计α(15)步骤2:根据α 估计值,通过下式重新估计P(16)式中,,β 是由P 的对角线元素组成的向量,I 表示PQ×1 的全部向量。步骤3:用步骤2 的估计结果更新P 的值并返回步骤1当α 或β 的变化不大于预设的门限时,迭代终止。
3.2 改进幅度稀疏表示重建方法
传统的幅度稀疏表示SAR 成像方法只考虑了场景幅度中的稀疏信息,新算法针对传统算法的不足进行算法研究与改进,不仅考虑了幅度中的稀疏信息,还将稀疏表示中的系数分布与幅度的实值信息进行信息先验。
3.3 幅度的实值约束

通过该方式对幅度进行了实值约束,更接近现实情况。因此,场景的重建质量将得到提高。这在下文的仿真实验和结果中得到了验证。
3.4 利用部分基的稀疏表示方法
实际情况中,若使用DCT 方法来对SAR 图像的幅度进行处理,所得出的结果大多数是处于低频部分,高频分量对应的系数基本约等于零。我们可以将高频分量忽略,单独将场景幅度用低频分量来表示,且稀疏表示矩阵中不考虑高频分量,来达到减少未知系数的个数和降低稀疏表示矩阵的尺寸的目的。

式中,α'的尺寸为K×1,这个尺寸可以远小于α 的尺寸。
因为降低了待估计变量与稀疏表示基的个数,从而降低了式(17)中优化问题的维数,算法复杂度相应地降低。
3.5 改进算法的框架和具体求解方法
改进算法框架:结合上述内容,改进算法的框架总结如下。
算法2 改进幅度稀疏表示重建算法

初始化:选用到适合的基,实值幅度可以由实值系数来表示,初始化时只使用低频分量对应的基。用基础匹配滤波方法所求到的值作为g 的初始值,即得到了P 和α'的初始值。步骤1:根据P,通过下式估计α':(19)步骤2:根据α'的估计值通过下式重新估计P:(20)式中,,β 是由P 的对角线元素组成的向量,I 表示PQ×1 的全部向量。步骤3:用步骤2 中得到的值来更新P 的结果并重新从步骤1开始当α'或β 的变化不大于初始门限值时,终止迭代。
算法内步骤1、2 用的都是拟牛顿算法。在改进方法的步骤1中,的尺寸为PQ×K(K=K1K2),的尺寸也为PQ×K,α'的尺寸为K×1。在步骤1 中,的尺寸为PQ×PQ,的尺寸也为PQ×PQ,α 的尺寸为PQ×1。对于步骤1 的计算流程,不管是Hessian 矩阵计算还是梯度计算,改进算法的计算复杂度都只有现有算法的K/(PQ)。而在步骤2 中,改进算法和现有算法的计算复杂度一致。传统算法中的步骤1、2 计算复杂度是一样的。在前文提到,K/(PQ)可以远远小于1。在迭代的过程中,改进算法整体计算复杂度可能只是传统算法的一半。改进算法的收敛速度更快的原因是因为改进算法稀疏表示中的参数分布先验信息与李永乐场景幅度的实值信息。为了让算法拥有相同的重建精度,改进算法进行的迭代次数会小于现有算法,算法计算复杂度会小于现有算法的二分之一,并且重建结果会比已有算法效率更高。
4 仿真实验及数据结果
本节使用符合Shannon-Nyquist 采样定理的数据进行实验,实验过程中随机采用部分数据进行正则化重建处理并且将高斯白噪声加入到数据中,其信噪比为20dB。主要仿真参数如下:带宽(256MHz)、采样率(512MHz)、采样点数(11264)、选取的采样点数(2048)、场景距离点数(1024)、完备基的数量(1024)和选取基的数量(40)。
图1 给出了算法1 的结果,实验数据使用2048 点采样,用完备DCT 基来稀疏表示场景幅度。可以看出,重建结果中仍有部分毛刺。
图2 是本文介绍算法2 的实验结果,重建模型采用场景幅度的实值信息,也是使用2048 点采样、场景幅度由40 个低频DCT 基来表示。可以看出,图中几乎没有毛刺。证明改进算法比现有幅度稀疏表示重建方法和原有的匹配滤波的重建效果更好。
幅度重建结果的均方误差由图3 能够看出,因为合理采用更多的先验信息,本文介绍的改进算法与现有的幅度稀疏表示重建方法相比,重建误差得到优化变得更小。并且随着迭代次数递增,改进算法的重建误差下降得更快。综上所述,对于一样的重建精度,改进算法不需要太多的迭代次数。
根据以上实验结果及误差验证可知,同现有算法相比,本文介绍的改进算法不但有更好的重建效果,而且算法的运算时间也更少。
5 结束语
本文对稀疏信号处理的雷达成像算法进行讨论,把稀疏图像信号处理加入到高分辨率雷达成像算法中去考虑,针对现阶段雷达成像算法的不足,围绕信号稀疏表征、雷达成像模型及图像信号重构算法,弥补了现有雷达成像算法在图形重构方面的不足,克服了欠采样条件下图像重构的精度问题,使图像重构时间得到缩短,并优化改善了模型算法数值的稳定性。考虑到目前成熟的雷达成像设备都是基于传统采样方法制造而成,针对稀疏信号处理的雷达信号采集设备在实际应用中并未推广和被测目标的不确定性,如何提升算法对于传统硬件的兼容将会是下一步的研究方向。
猜你喜欢
大自然探索(2023年7期)2023-08-15
股市动态分析(2021年25期)2021-12-30
小学生学习指导(低年级)(2018年12期)2018-12-29
宇航计测技术(2018年3期)2018-09-08
制造业自动化(2017年2期)2017-03-20
中央民族大学学报(自然科学版)(2016年3期)2016-06-27
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10