
倾斜摄影测量在建筑附属设施施工中的应用
2021-01-26 08:37池海旭段政明冯建伟
地理空间信息 2021年1期
盛 辉,池海旭,段政明,曾 喆,冯建伟
(1.中国石油大学(华东),山东 青岛 266580)
在建筑附属设施的施工测量中,传统方法是通过全站仪等设备来完成。何屹雄[1]等利用全站仪完成了建筑立面的测绘,降低了立面测量的成本并提高了作业效率;但凭借全站仪完成建筑物附属设施的施工测量通常需要多人协同工作,对于某些不规则且特征点多的建筑物附属设施,施测难度大,外业采集的数据量过大,内外业工作量依然繁重。倾斜摄影测量技术通过平台上搭载的传感器从低空垂直、倾斜等不同角度摄影测量目标物体,进而获得高分辨率的影像。目前该技术已广泛应用于城市管理、变形监测、应急指挥等领域,如郑史芳[2]等将摄影测量技术应用于地质灾害监测中,建立的三维模型为地质灾害隐患点的预警提供了强有力的依据;但在建筑附属设施测量中的应用尚少。本文利用基于多旋翼消费级无人机的倾斜摄影测量技术构建了某图书馆雨棚的三维模型,进而分析该技术在获取雨棚框架尺寸方面可达到的精度。
1 基于无人机的建筑附属设施施工测量方法
基于无人机的建筑附属设施施工测量作业分为外业数据采集和内业数据处理两个部分(图1)。无人机倾斜摄影测量系统主要包括飞行控制平台、倾斜摄影相机和飞行数据处理软件3 个部分。无人机按照作业用途可分为消费级无人机和专业级无人机,按照机翼形式可分为多旋翼和固定翼,其中多旋翼消费级无人机凭借其价格低廉、体量小、机动性和灵活性强等优点得到了广泛应用。利用多旋翼消费级无人机可进入一些作业条件困难的区域,采集常规方法不能获取的影像数据信息,进而快速建立直观、可靠的三维实景模型,为工程建设或其他城市管理的相关工作提供地理信息数据。
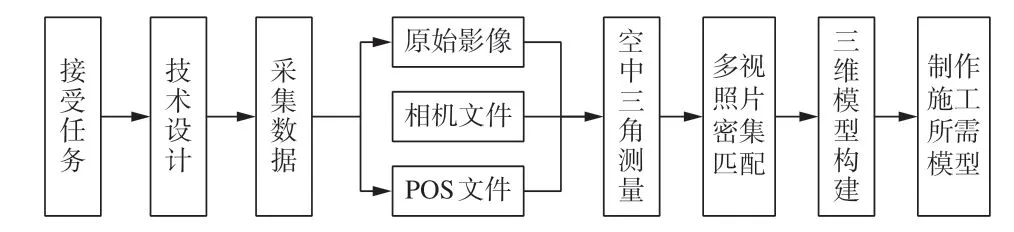
图1 基于无人机的建筑附属设施测量流程图
1.1 无人机外业数据获取
针对不同的建筑附属设施采用不同型号类别的无人机设备,本次实验采用大疆消费级四旋翼无人机Phantom 4 Pro。该无人机稳定、安全、灵活,且具有视距提示系统、GPS 定位系统和IMU 惯导系统,拍摄的照片中具有POS 数据。无人机搭载相机视场角为84°、有效像素为2 000 万、等效35 mm 相机标准焦距、f/2.8~f/11 带自动对焦的云台相机。由于建筑附属设施周边环境复杂,为了使数据充分且保证设备安全,以垂向飞行航线搭配70%~80%的航向和旁向重叠度的方式来保证影像数据质量,抵近附属设施3 m左右的距离进行数据采集。影像数据采集前,在龙骨框架上设置若干个检查点,以便评价三维模型精度。
1.2 建筑附属设施三维模型构建
对获取的多角度、mm 级、高重叠率的照片数据进行整理检查,然后利用三维建模软件进行目标物模型的精细构建。数据处理主要包括照片预处理、空中三角测量、多视影像密集匹配和三维产品模型构建等步骤。
1)空中三角测量和模型尺度信息添加。空中三角测量又称空三加密,是在摄影测量中,以严密的数学模型为基础,通过照片上量测的像点来求算其他所需加密点坐标的过程[3],是无人机影像内业处理的关键部分。倾斜摄影测量系统以原始POS 数据为初始参数,结合相机文件和影像信息,通过由粗到精的多层影像金字塔式的自动匹配方式,在每层金字塔影像上提取一一对应的特征点,并在每层影像上利用同名连接点进行整体区域网光束法平差,得到同名点的匹配结果;同时为了确保平差精度,建立了连接点、控制点和IMU 辅助数据的多视角影像联合解算[4-5]。内部处理流程如图2 所示。
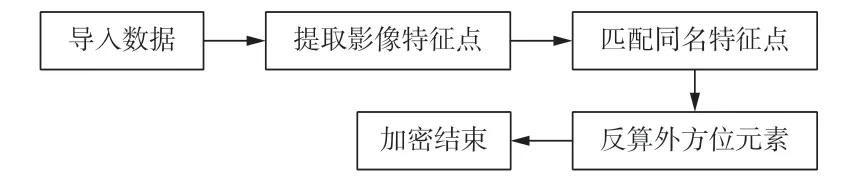
图2 空三加密过程
Smart-3D 软件采用最严密且精度最高的光束法区域网平差方法,以中心投影的共线方程为平差基础方程[6],以摄影光束为基本单元来实现模型之间光束的最佳交会,从而反算得到加密点的地面坐标和外方位元素。将影像数据导入Smart-3D 软件中,自动进行空三加密并得到每张影像的位置和姿态角信息。
根据外业数据采集设置的检查点,按照各检查点的空间分布情况,在照片上选取恰当的检查点作为尺度标识点(A、B、C)进行刺点作为尺度约束点,依次为a、b、c,并根据外业量测的实际距离设置约束点之间的距离。其他检查点可作为检查模型精度的点。
2)多视影像密集匹配。无人机外业获取的数据包含多视角下的航摄影像数据,多视影像密集匹配技术是研究这些数据的关键技术[7]。影像匹配的原理是根据多张影像之间的相似性,利用相关函数来确定影像之间的同名点。其主要流程为获得影像的外方位元素,并对具有精确外方位元素的影像进行分类;再对分类结果进行匹配,获得高密度点云;最后经过滤波处理获得精度较高的三维点云。多视影像密集匹配技术可以更好地利用冗余影像信息,结合每幅影像的POS 数据等信息,合理运用多视匹配所需的多视点数据准确获取多视影像点的同名坐标,进而得到建筑物的最终三维数据信息[8-9]。
3)三维产品模型构建。将基于多视影像密集匹配技术生成的密集点云用于构建不规则三角网表面和白体模型;再选用无杂物遮挡、姿态均匀一致、无错位的照片贴合在白体模型上得到该附属设施的三维模型;最后以EPS 地理信息工作站为矢量绘图平台,无需佩戴立体眼镜,通过内置的绘图模块,根据影像和自动空中三角测量生成的三维模型勾绘出雨棚的轮廓或框架模型[10]。根据工程实际需要,选取雨棚上的标志点或特殊点,并参照实际结构依次连接成线,再将EPS数据结果导入AutoCAD 软件,生成附属设施的产品模型供施工方使用。
2 案例应用
2.1 实验区概况
本文选取的实验区位于青岛市某大学校园内,区域内新建图书馆雨棚的支撑框架已搭建完毕,需准确获取其龙骨框架的拐点、龙骨棱角点等特征点的相对位置,从而获得龙骨架间的距离和弧度来制作雨棚。若利用全站仪来测量龙骨框架,则大约需要测量100 个框架特征点;且受框架结构影响,某些特征点并不能准确测量,外业工作量大,因此实验采用无人机倾斜摄影测量技术完成对龙骨框架的测量。首先利用消费级无人机获取龙骨架的影像数据,然后利用Smart-3D 软件构建实景模型,最后利用EPS 软件和AutoCAD 软件制作雨棚框架模型供施工方使用。
2.2 数据获取与三维模型构建
针对该雨棚龙骨框架特点和建模精度要求,在龙骨框架上设置41 个检查点,采用大疆Phantom 4 Pro四旋翼无人机获取影像数据信息。为了保证0.002 m 的影像分辨率,航向和旁向重叠度均设置为75%,抵近龙骨框架3 m 左右的距离进行数据采集。
对获取的多角度、mm 级、高重叠率的照片数据进行整理检查后,即可采用三维建模软件进行雨棚的精细构建。完成影像数据的预处理后,在Smart-3D 软件上对影像数据进行空中三角测量,自动提取连接点;再通过连接点反算确定照片位置;然后根据外业数据设置的检查点空间分布情况,选取8 个检查点作为尺度标识点进行尺度约束;最后对数据再次进行空中三角测量、多视影像密集匹配等处理,即可得到雨棚的三维模型(图3)。

图3 雨棚三维模型
利用EPS 地理信息工作站,根据影像和自动空中三角测量生成的三维模型勾画龙骨框架(图4),并选取各龙骨框架的中心端点;再根据雨棚实际框架结构依次连接成线;最后将EPS 数据结果导入AutoCAD软件生成雨棚产品模型(图5),供施工方使用。
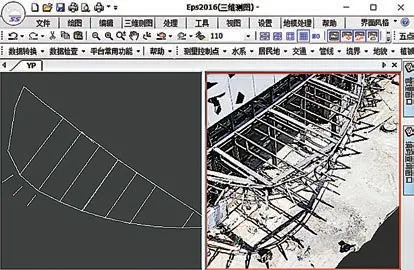
图4 EPS 绘制龙骨框架
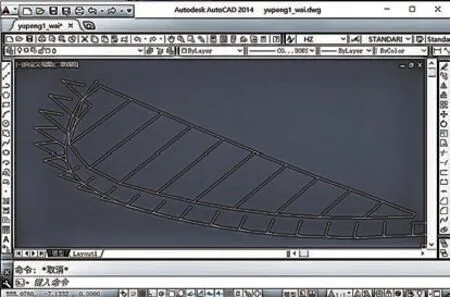
图5 雨棚龙骨框架模型
2.3 三维模型精度分析
雨棚等建筑附属设施通常是由几何结构构成的,对于构建完毕的三维实景模型,可通过在其表面量测感兴趣点之间的距离和方位等信息进行精度评价。根据工程需要,本次模型构建对绝对定位精度不做要求,但对相对定位精度有严格的要求。在量测模型上和外业数据采集时均匀设置检查点之间的距离[11],并通过数学方法确定模型构建的相对定位精度。
相对位置精度用均方根误差来表示,第i组检查点实际测量值与模型量测值之间的误差为di,则多个检查点的均方根误差为:

各检查点的精度统计和误差曲线如表1 和图6所示。
实验选取实景模型和实际龙骨框架上的30 个检查点进行统计,可以看出,第二组数据误差为8.5 mm,明显高于其他组数据误差,对此进行分析认为是人工采集操作产生的误差,在三维模型上采集一个像素产生的误差,实际将导致1~2 cm 的误差,因此将其作为粗差进行剔除;其余29 个检查点在模型上量测的距离与在龙骨框架上量测的距离非常接近,其中最大误差为4.3 mm,最小误差为0,平均相对误差为0.24%。由式(1)计算得到所有检查点的均方根误差为1.89 mm,说明本次实验结果符合GB 50026-2007《工程测量规范》中有关附属构筑物安装测量允许偏差±5 mm的规定,可有效获取雨棚龙骨框架的尺寸信息,满足了实际应用要求。
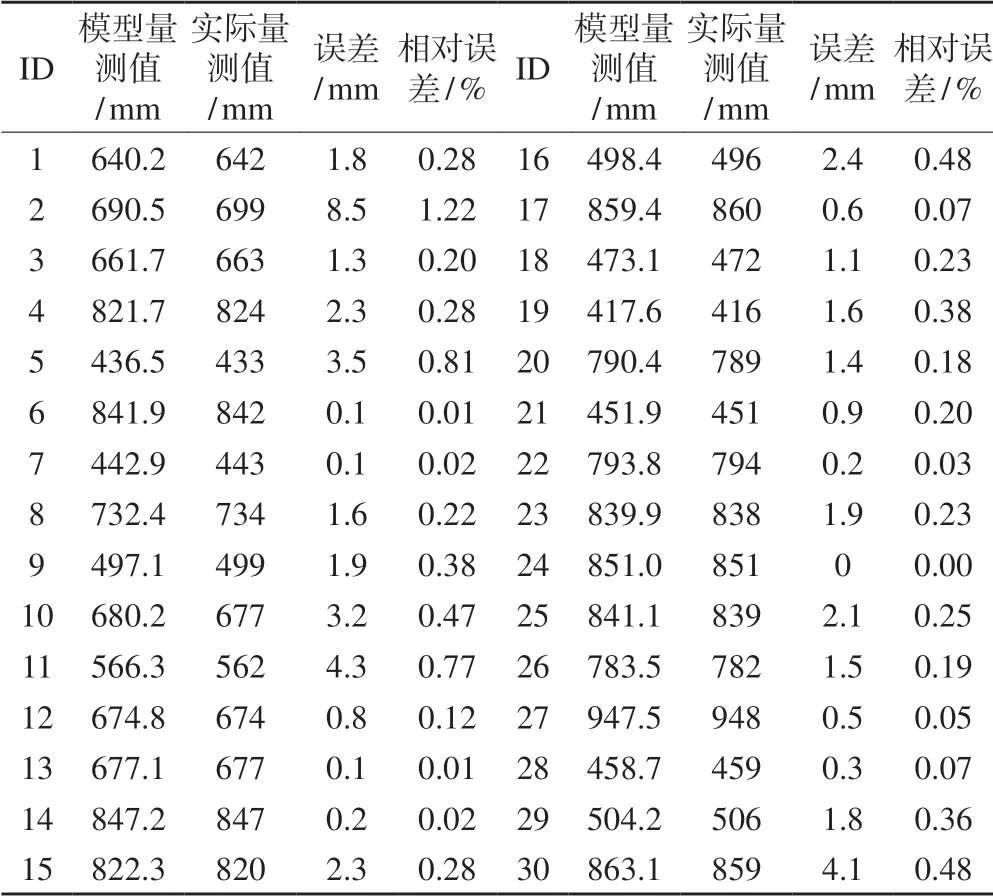
表1 三维实景模型精度统计
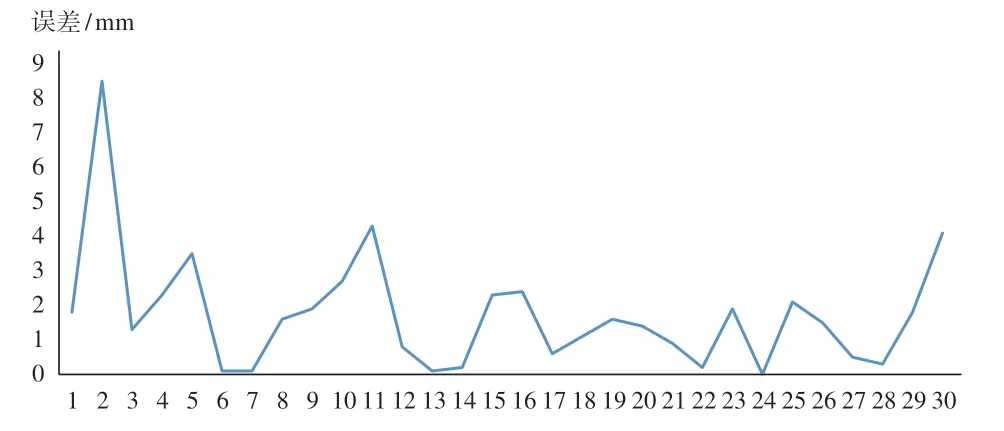
图6 各检查点的误差曲线
3 结 语
消费级无人机凭借其体量小、机动性和灵活性强的特点,能在短时间内采集影像数据信息,并建立三维模型,且建立的三维模型精度完全符合相关标准规范和工作要求。实际应用结果表明,将无人机倾斜摄影测量技术和其他相关软件应用于建筑附属设施的施工测量中,获取的结果不仅满足了相关规范规定的精度要求,而且大大提高了工作效率,减少了外业工作人员的劳动强度,为附属设施的建造施工提供了很好的视觉参考,可为其他相关工程与数字城市建设提供借鉴和服务。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
环球时报(2021-04-23)2021-04-23
中国建筑金属结构(2019年4期)2019-05-15
国际呼吸杂志(2019年4期)2019-03-12
建筑科技(2018年2期)2018-10-25
装备制造技术(2018年5期)2018-07-11
上海铁道增刊(2017年3期)2018-01-22
现代计算机(2015年31期)2015-09-28
重庆建筑(2014年12期)2014-07-24
