
WGS84与ITRF框架间的坐标转换分析
2021-01-26 08:36:08严悦
地理空间信息 2021年1期
严 悦
(1.武汉导航与位置服务工业技术研究院有限责任公司,湖北 武汉 430073)
在卫星导航定位系统中,用于计算卫星位置的轨道数据与测量定位的结果同属一个坐标系,因此利用GPS 进行测量定位时,若采用广播星历,则结果属于WGS84 坐标系;若采用IGS 精密星历,则结果属于国际地球参考框架(ITRF)[1]。对于GPS 用户而言,WGS84 坐标系与ITRF 框架之间的转换关系是比较关心的问题。
1 WGS84坐标系与ITRF框架
1.1 WGS84 坐标系简介
WGS84 坐标系是由美国国防制图局于20 世纪80 年代中期建立的,并于1987 年取代了此前GPS 所采用的WGS72 坐标系,正式成为GPS 的新坐标系[1]。
WGS84 坐标系的维持是通过对组成GPS 拄制部分的跟踪站进行坐标赋值来实现的。截至2018 年9 月,WGS84 坐标系总共进行了5 次修订(表1):1994 年经过第一次修订更新为“WGS84(G730)”;1997 年经过第二次修订更新为“WGS84(G873)”;2002 年经过第三次修订更新为“WGS84(G1150)”;2012 年经过第四次修订更新为“WGS84(G1674)”;2013 年经过第五次修订更新为“WGS84(G1762)”[2]。其中,“G”表示修订点的坐标完全采用GPS 方法确定,其后紧接的数字表示开始使用修订点坐标的GPS 周数。
WGS84(G1674)和WGS84(G1762)都将NGA站的坐标约束到ITRF2008(2005.0),且平差后点位精度优于±1 cm。本文针对WGS84 坐标的讨论是基于WGS84(G1674)和WGS84(G1762)两个版本,其他的版本不在本文讨论的范围之内。

表1 WGS84 坐标系的6 个版本
1.2 ITRF 框架简介
ITRF 框架是国际地球参照系(ITRS)的实现,由国际地球自转与参考系统服务组织(IERS)负责建立和维护。建立和维持ITRF 框架所采用的空间大地测量技术包括激光测卫(SLR)、激光测月(LLR)、甚长基线干涉测量(VLBI)、GPS 以及多普勒定轨和无线电定位系统(DORIS)等。1988 年-2018 年9 月,IERS已先后发布了ITRF88、ITRF89、ITRF90、ITRF91、ITRF92、ITRF93、ITRF94、ITRF96、ITRF97、ITRF2000、ITRF2005、ITRF2008 和ITRF2014 共13 个版本的参考框架[3]。目前,最新的ITRF 框架为ITRF2014,于2016 年2 月发布[4]。ITRF2014 到以往部分ITRF 框架(ITRF97、ITRF2000、ITRF2005 和ITRF2008)的转换参数及其速率如表2 所示[5],其中Tx、Ty和Tz为平移量,D为尺度因子,Rx、Ry和Rz为旋转量,为7 个转换参数速率。
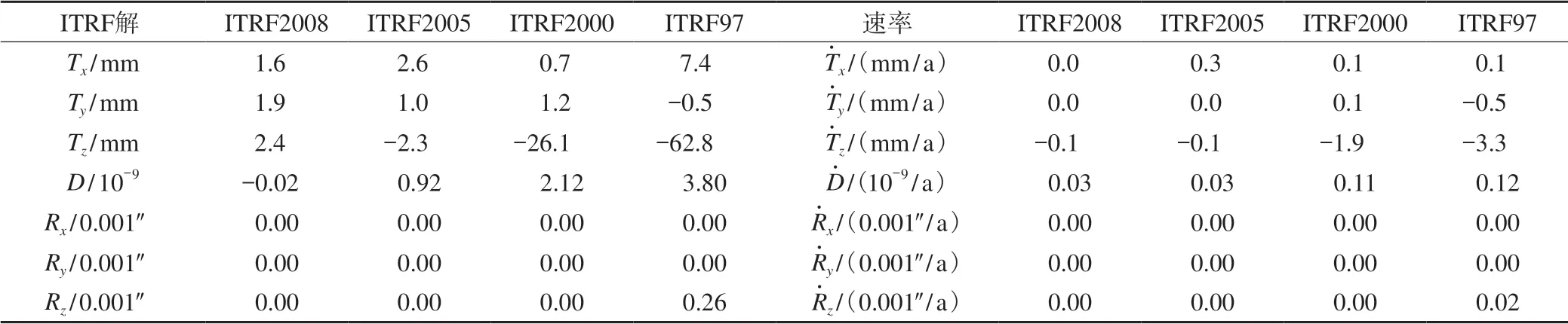
表2 ITRF2014 到以往部分ITRF 框架的转换参数及其速率
2 ITRF框架间的坐标转换
2.1 框架间坐标转换
ITRF 全球跟踪站的坐标、速度以及ITRF 转换到以前框架的转换参数、速率均可从ITRF 网站上获取。转换参数共有14 个,包括7 个转换参数和7 个转换参数速率,如表2 所示。
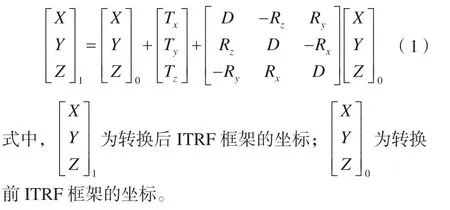
不同ITRF 框架间的坐标转换可通过七参数转换模型实现,转换公式为:
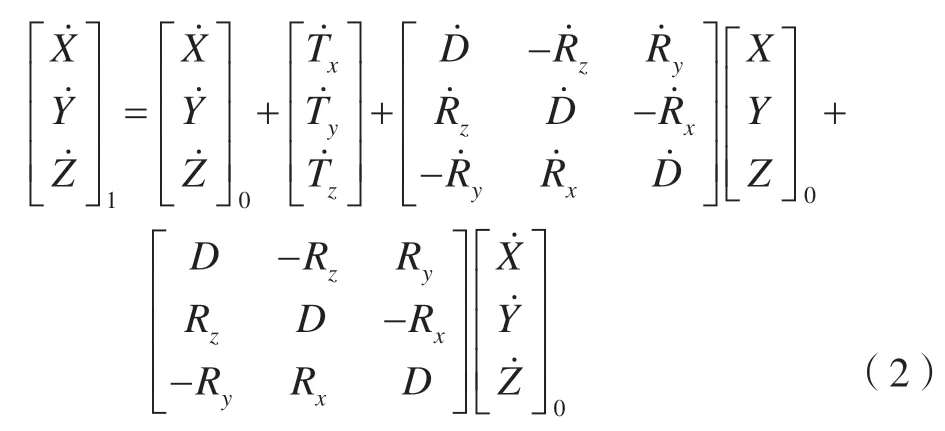
2.2 框架间速度转换
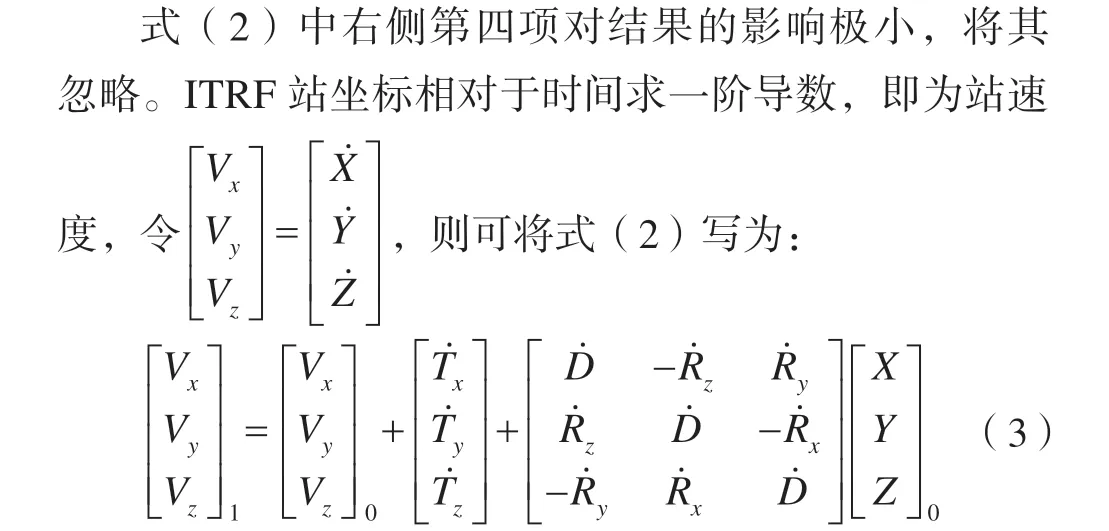
将式(1)相对于时间求一阶导数,得到的微分方程为:
2.3 历元间参数转换
ITRF 框架间转换参数在不同历元间的转换关系,可表示为:

式中,t为参数转换后的历元;tT为给定转换参数的历元;Pt、PtT为对应时刻的7 个转换参数;P˙tT为转换前的7 个转换参数速率。
2.4 历元间坐标转换
同一ITRF 框架在不同历元间的坐标,可表示为[6]:
2.5 框架间坐标转换流程
两种ITRF 框架间的坐标转换,最多涉及到3 个历元:①转换前框架的参考历元,以t0表示;②转换后框架的参考历元,以t表示;③给定框架间转换参数的参考历元,以tT表示,表2 中tT=2010。
ITRF 框架间坐标转换有两种思路:①先在转换前的框架内完成历元间坐标转换,再进行框架间的坐标转换;②先完成框架间的坐标转换,再进行框架内历元间的坐标转换。两种思路看起来差别不大,但实质上第二种实现方式增加了3 个待求量(转换后ITRF 框架下的速度),因此选择第一种实现方法(图1)。
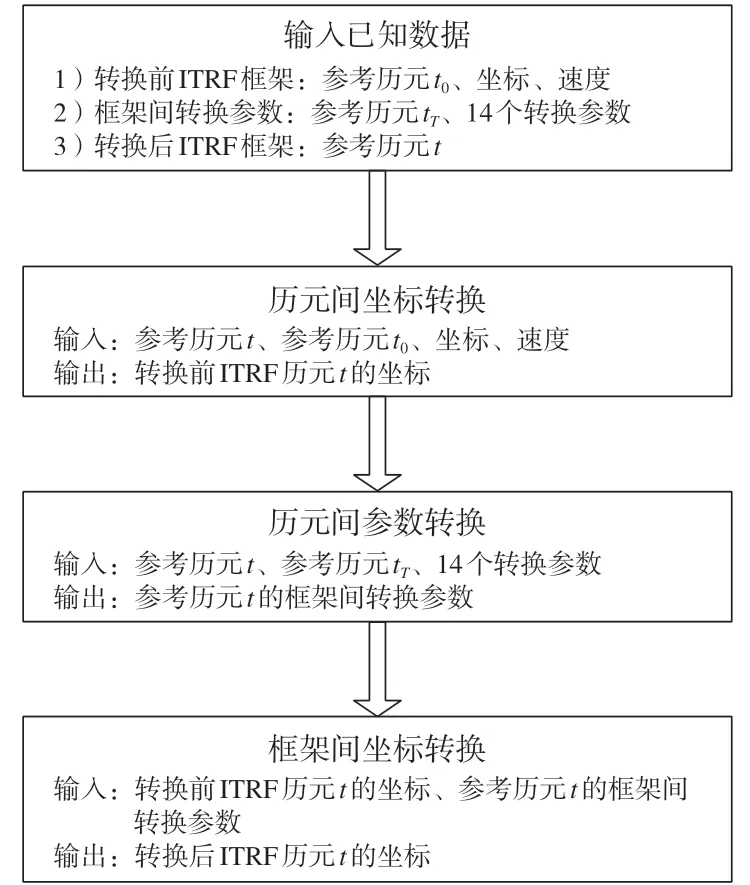
图1 框架间坐标转换流程
3 算例分析
从SOPAC 网站上获取历元为2013.0、2014.0、2015.0、2016.0、2017.0 和2018.0 的WGS84 坐标数据,剔除其中内符合中误差较大的站点;再从ITRF 网站上获取ITRF2008 和ITRF2014 的SSC 文件;然后将WGS84坐标的站点名与ITRF SSC 文件中的站点名进行匹配,剔除坐标不是同一位置的异常点;最终选取337 个跟踪站用于坐标对比。
3.1 ITRF2014 转换为ITRF2008
提取ITRF2014 SSC 文件中337 个跟踪站的坐标,按照图1 中的流程方法转换至ITRF2008 2005.0历元下,转换后的框架表示为ITRF2008(2014)。ITRF2008(2014)与ITRF2008 的坐标差值如图2、3所示。
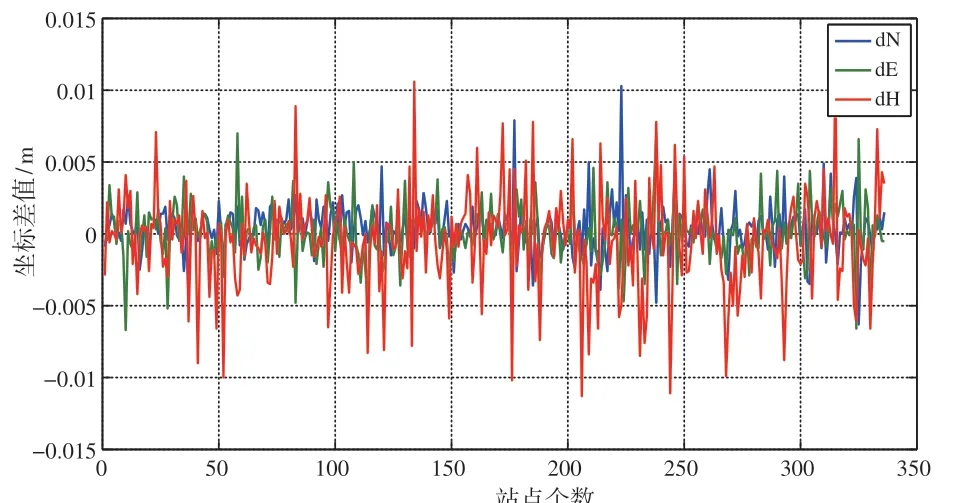
图2 ITRF2008(2014)与ITRF2008 的站心坐标差值
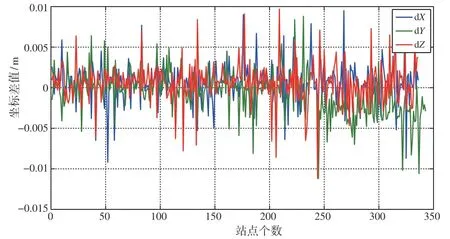
图3 ITRF2008(2014)与ITRF2008 的空间直角坐标差值
经统计,ITRF2014 转换为ITRF2008 的站心坐标标准差(北、东和天,单位为m)分别为0.001 6、0.001 9和0.003 3,空间直角坐标标准差(X、Y和Z,单位为m)分别为0.002 4、0.002 2 和0.002 4。
3.2 ITRF2008 与WGS84 坐标对比
ITRF2008 坐标经框架内坐标转换后,分别与2013.0、2014.0、2015.0、2016.0、2017.0 和2018.0 的WGS84 坐标作差,统计结果如表3~5 所示,可以看出,ITRF2008 与WGS84 坐标基本一致,但随时间离ITRF2008 参考历元2005.0 越来越远,ITRF2008 与WGS84 坐标差值精度越来越差。
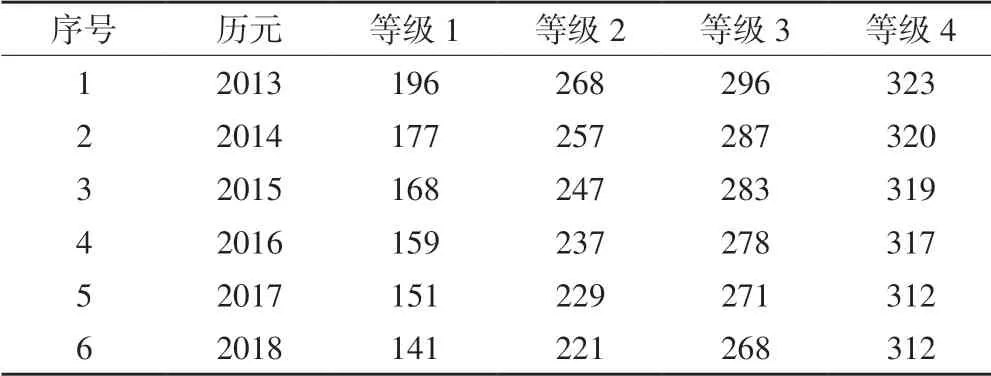
表3 ITRF2008 与WGS84 坐标差值精度等级分布
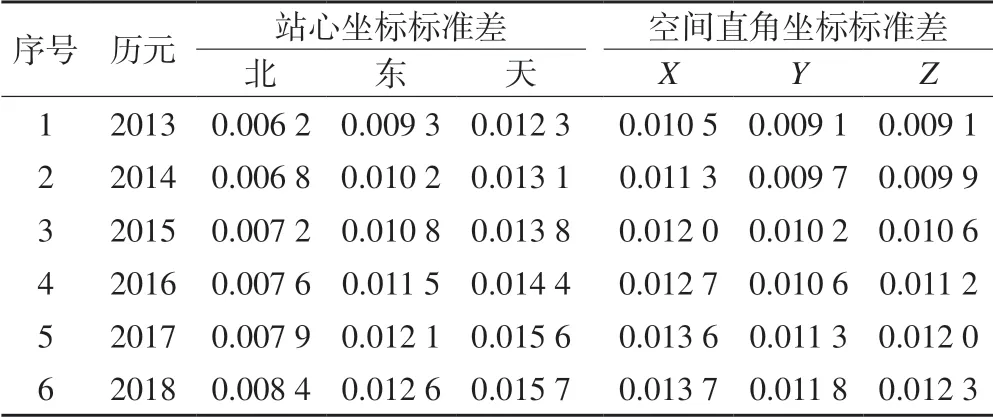
表4 全部337 个跟踪站的ITRF2008 与WGS84 坐标差值精度统计表/m
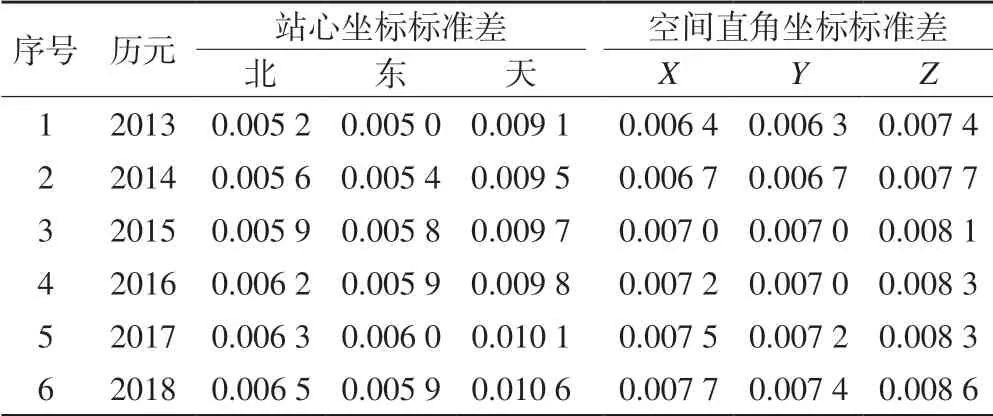
表5 ITRF2008 与WGS84 坐标差值等级3 的精度统计表/m
3.3 ITRF2008(2014)与WGS84 坐标对比
ITRF2014 转换为ITRF2008(2014)后,分别与历元2013.0、2014.0、2015.0、2016.0、2017.0 和2018.0 的WGS84 坐标作差,统计结果如表6 ~8 所示,可以看出,ITRF2008(2014)与WGS84 坐标基本一致,但随时间离ITRF2014 参考历元2010.0 越来越远,ITRF2008(2014)与WGS84 坐标差值精度越来越差。
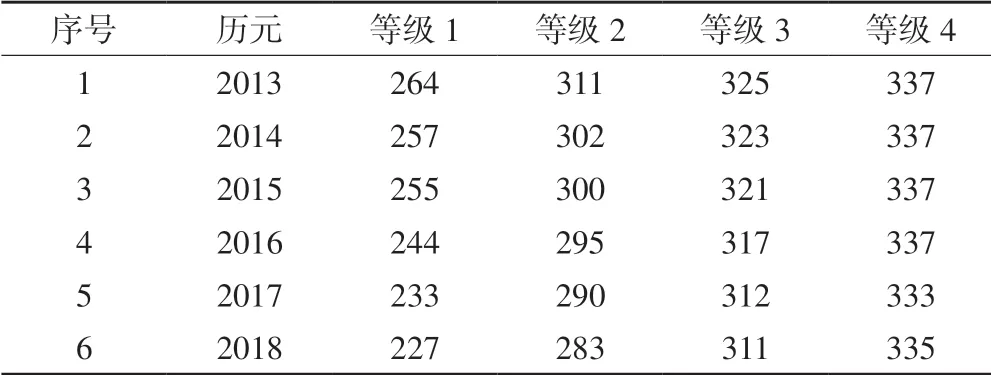
表6 ITRF2008(ITRF2014)与WGS84 坐标差值精度等级分布
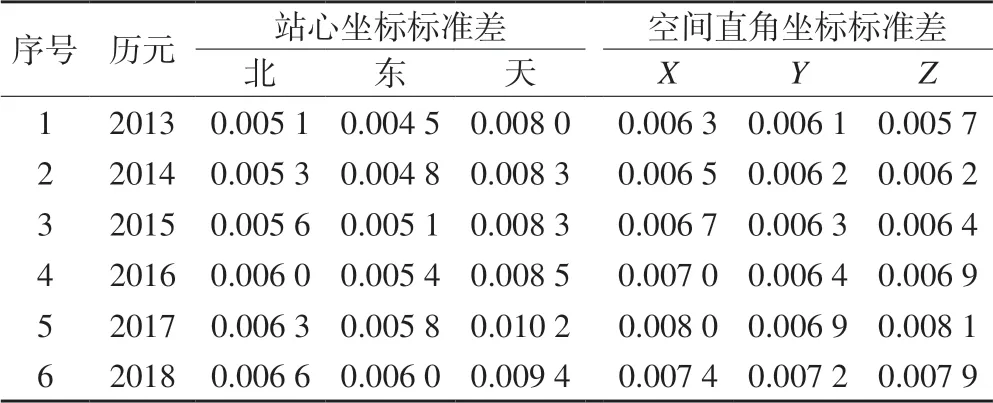
表7 全部337 个跟踪站的ITRF2008(2014)与WGS84 坐标差值精度统计表/m
3.4 结果分析
ITRF2008 与WGS84 坐标基本一致,但随着时间的推移,ITRF 框架与WGS84 坐标差值精度越来越差。对比ITRF2008、ITRF2008(2014)与WGS84 坐标作差精度统计结果发现,相同历元ITRF2008(2014)的精度统计指标均优于ITRF2008,其原因可能是由于两个框架下的速度不同所导致的。
ITRF2008(2014)与ITRF2008 空间直角坐标速度差值如图4 所示,速度标准差(X、Y和Z,单位为mm/a)分别为0.586 8、0.513 0 和0.572 6。ITRF2008(2014)与ITRF2014 空间直角坐标速度差值如图5 所示,虽然二者并不是同一个参考框架,但与图4 中相同参考框架下的速度差值相比小一个数量级,因此可以认为,ITRF2008(2014)与WGS84 坐标差值精度优于ITRF2008,其原因在于ITRF2014 框架下站点的速度精度高于ITRF2008。
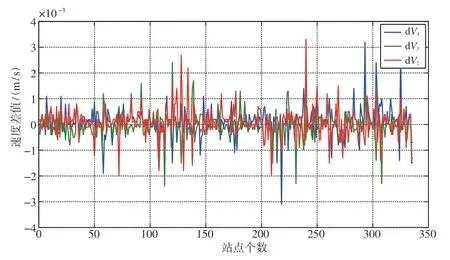
图4 ITRF2008(2014)与ITRF2008 空间直角坐标速度差值
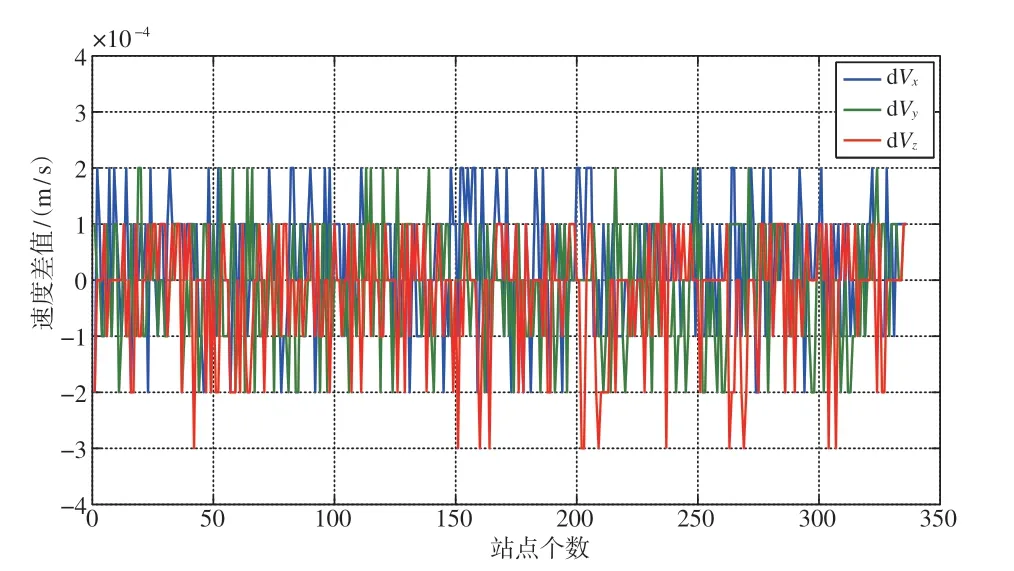
图5 ITRF2008(2014)与ITRF2014 空间直角坐标速度差值
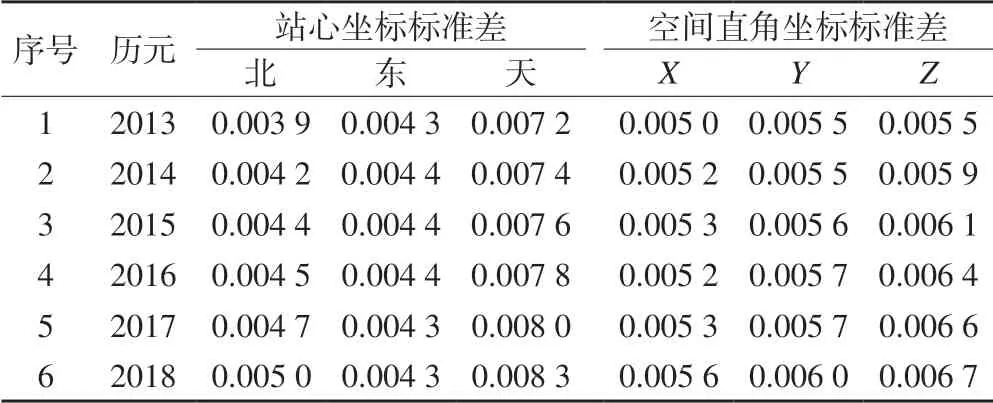
表8 ITRF2008(2014)与WGS84 坐标差值等级3 的精度统计表/m
4 结 语
本文针对WGS84 与ITRF 框架间的坐标转换关系,从SOPAC 网站上获取了历元为2013.0、2014.0、2015.0、2016.0、2017.0 和2018.0 的WGS84 坐标,从ITRF 网站上获取ITRF2008 和ITRF2014 的SSC 文件,选取337 个共有跟踪站用于坐标转换。在验证了ITRF2014 向ITRF2008 转换可靠性的基础上,分别对比ITRF2008、ITRF2008(2014)与各历元的WGS84 坐标。结果表明,ITRF2008(2014)、ITRF2008 与WGS84 坐标基本一致,但随着时间的推移,WGS84 与ITRF 框架间的误差越来越大,且ITRF2008(2014)与WGS84 坐标作差的精度优于同历元的ITRF2008。经分析发现,ITRF2008(2014)和ITRF2008 之间的差异主要在于速度的不同。
不同的ITRF 框架采用的数据时间段、数据数量和质量、参数模型、测站分布均存在不同,虽然随着IERS 分析中心方法的不断精化、观测和数据处理精度的不断提高,ITRF 框架间的差别越来越小[7],但ITRF框架间的差异还是切实存在、不容忽视的。特别是ITRF 框架的站速度,对站坐标的影响与时间成正相关关系,因此GPS 数据处理需采用ITRF 框架时,应选用最新的国际地球参考框架。
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:10
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:04
中学生数理化·七年级数学人教版(2021年4期)2021-07-22 03:15:58
高师理科学刊(2020年2期)2020-11-26 06:01:32
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
中成药(2017年6期)2017-06-13 07:30:35
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38
