
卫星预定位算法在编组站调机自动化系统中的研究
2021-01-26 08:36王彬鉴
铁路通信信号工程技术 2021年1期
王彬鉴,张 勋
(北京全路通信信号研究设计院集团有限公司,北京 100070)
1 概述
机车定位功能是编组站调机自动化系统的核心功能之一,准确和及时地获取调车机车在编组站中的定位信息是机车安全、高效进行调车作业的必要保障,也是编组站提高作业效率和解编能力的重要保证。
目前轨道交通领域中,CBTC城轨控制系统、CTCS-2、CTCS-3列控系统及STP调车监控系统普遍采用点式应答器对机车、车列进行定位。这种方法虽定位较为方便准确,但在编组站实际应用中存在明显缺陷。第一,综合成本较高,需在铁轨中铺设大量应答器设备并且需要专门人员进行定期维护;第二,对环境要求较高,如有雨雪或其他杂物等覆盖,会严重影响应答器定位的准确性;第三,定位呈非连续性,由于点式应答器的数量限制,机车不能实现实时定位,只有带应答器接收设备的机车通过点式应答器时才可实现定位。
卫星定位系统是一种以卫星为基础的高精度无线电导航定位系统,目前已在公路交通以及地理勘测行业得到广泛应用。将卫星定位技术用于编组站调机自动化系统中不但可以降低建设和维护成本,还可以极大提高机车定位准确性。
2 编组站调机自动化系统介绍与预定位需求分析
2.1 编组站调机自动化系统介绍
编组站调机自动化系统是一套应用于编组站调车机车的自动控制系统。该系统由地面和车载两部分构成,利用无线通信技术来进行车载设备与地面设备间的数据传输。系统主要功能有信息层面的站场表示及本机位置信息显示、调车作业计划显示、防护信号及终端障碍显示、机车工况显示和报警信息显示等;控制层面的机车超速防护、信号及障碍物的距离防护、推峰作业遥控和自控、平调作业遥控等。系统通过地面设备与编组站CIPS系统结合,使系统的一体化程度、信息共享度、构成简化度、自动化程度都达到较高的水准。
2.2 调机定位技术存在的问题分析
由于编组站股道、道岔数量众多且位置相对集中,一般卫星定位设备的动态定位精度离散范围较大,对于编组站作业的调机安全、快速、准确的完成初始定位的实际需求难以满足,而使用超高精度的卫星定位设备又会使成本大幅上升。为运用卫星定位技术准确、高效、快速的实现机车初始定位,同时有效控制成本,特研究一套适用于编组站调机自动化系统的调机预定位算法。该算法需要解决的问题主要包括以下几个方面。
1)能同时实现多台机车初始定位
机车初始定位应以单台机车为计算依据。当多台机车需要同时进行初始定位时,用于进行机车初始定位运算的地面主程序应启动多个程序流程,分别进行计算、判断。
2)启动预定位的前提条件
与车载设备建立通信连接:车地通信是进行初始定位的基本依据之一,对于无连接的机车,不应启动该计算。
该机车无定位:仅对无定位的机车进行预定位,对于有连接且已有定位的机车,不应启动该流程。
车载设备提供数据实时有效:车载设备应提供有效的卫星定位信息、速度信息、走行距离等信息。
与站场表示服务器或其他采集设备有通信:地面主程序应保证能收到正常的站场表示信息。
3)输出预定位信息
调机预定位实现后,应输出以下几个参量:卫星定位区段及本机占用区段集合;
卫星定位区段:输出一个卫星定位到电子地图中的唯一区段ID;
本机占用区段集合:输出一个数量≥1且<n(n∈自然数,上限50)的区段集合,<1或≥n时应做异常处理。
2.3 调机预定位实现方式
调机预定位算法采用“卫星定位+轨道电路+机车走行测长”的融合定位算法对调机进行定位跟踪验证卫星定位出的初始区段。
如图1所示,首先由车载设备利用卫星定位接收天线获取经纬度数据,利用轮轴速度传感器获取机车速度及位移数据并通过无线通信天线发送给地面主机,同时CIPS将股道占用信息实时发送给地面主机。地面主机主控制程序结合卫星定位经纬度数据和股道占用情况进行分析计算,筛选出机车可能所在的区段;基于此区段根据机车后续的运行方向、走行位移和前方股道占用的表示信息,计算出机车当前可能所在区段,并结合股道占用情况和走行测长等信息来综合验证之前定位是否准确。若预定位成功,则将定位信息发送给车载设备进行显示。
3 卫星预定位算法
3.1 卫星预定位算法思路
根据2.3,利用预定位算法分了卫星定位初始定位区段筛选和定位区段验证两个逻辑过程,如图2所示。

图1 调机预定位流程图Fig.1 Flow chart of shunting locomotive pre-positioning

图2 卫星预定位算法思路图Fig.2 Idea diagram of satellite pre-positioning algorithm
3.2 卫星定位初始定位区段筛选
1)站场坐标点测绘
为精确定位机车坐标所在区段,在绝缘节轨芯位置和区段内部测绘打点,曲率大的地方打点较为密集,将其近似化为多条折线段,如图3所示,并将卫星定位测绘点经纬度坐标存入数据库供程序读取计算。
2)卫星定位经纬度
利用机车顶部卫星定位天线获取机车实时定位信息并发送给地面主机。
3)确定粗/细定位精度区段集合
地面主程序收到机车卫星定位坐标,遍历数据库所有卫星定位测绘点经纬度数据,判断所属定位矩形框。根据站场图形角度旋转坐标系,将机车卫星定位数据和卫星定位测绘点数据按照所需旋转角度同时做旋转处理,使矩形框与坐标轴平行便于计算。然后计算机车卫星定位点与矩形框所属区段的直线距离l,若0≤l<15,则将区段存入粗定位精度集合M,若0≤l<2,则将区段存入细定位精度集合N。
4)确定初始定位区段
地面主程序接收CIPS站场表示数据,判断集合M和N中各区段的占用状态及N⊂M,筛选当N=1并区段状态为占用时返回该区段ID。重复以上步骤n次,若连续n次返回的区段ID相同,则可确定机车的初始定位区段。否则,程序舍弃此次定位并重新进入定位流程。
3.3 定位区段验证
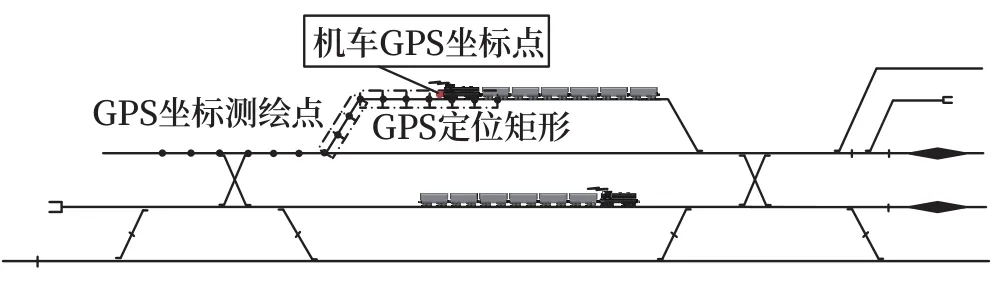
图3 区段卫星定位测绘点示意图Fig.3 Schematic diagram of satellite positioning mapping points in track section
由于卫星定位精度存在偏差,且当编组站股道较为密集或道岔区段时,上述矩形框存在重合的情况,此时定错轨道区段的概率较大,因此需要利用轨道电路和走行测长来对卫星定位初始定位进行校验。
根据卫星定位筛选出来的唯一轨道区段,结合机车此时运行速度及方向判断该机车将轧入的相邻连接轨道区段。当该连接区段的轨道电路状态由白光带(空闲)转换为红光带(占用)时,进行机车走行位移计算定标。以此定标点为起点计算机车走行的位移长度,该长度需要减去轨道电路的转换延时、系统间通信延时和车地通信延时所产生的误差长度,同时当前机车的卫星定位坐标点应处于该轨道区段用于定位判别的矩形框区间内。当机车在有运行速度且未改变运行方向的情况下轧入下一个相邻连接的轨道区段,该连接区段的轨道电路状态由白光带(空闲)转换为红光带(占用)时,进行机车走行位移计算的再次定标。该定标同样需要减去此前描述的误差长度,消除误差长度之后此时结算机车已走行的位移长度,即两次定标值之差。将此长度与上一个轨道区段在电子地图中存储的长度值进行比较,当两个长度值比较结果在系统判断成立的阈值范围以内并且当前机车的卫星定位坐标点处于该轨道区段用于定位判别的矩形框区间内,确认本次预定位成功完成,输出预定位初始区段ID及当前本机占用区段集合。
4 结束语
调机定位功能是编组站调机自动化系统的核心功能之一,分析现有调机卫星定位方法中存在的问题和局限性,通过对调机预定位需求进行总结,研究出一种用于提高调机初始定位效率和准确性的卫星预定位算法,该算法分为了卫星定位初始化定位区段筛选和定位区段验证两部分,有效解决了由编组站股道和道岔较密集导致的区段定位失准问题,且能够实时连续输出定位信息为调车机车、车列连续跟踪提供保障。目前该算法已在多个编组站的调机自动化系统中得以实际应用并取得良好的效果。同时,该卫星预定位技术可应用于北斗卫星定位系统、GPS卫星定位系统、伽利略卫星定位系统等多个不同的卫星定位系统中,并不局限于某个特定的卫星制式,应用范围较广,有较高的实用价值。
猜你喜欢
导航定位学报(2022年3期)2022-06-10
广东教学报·教育综合(2022年45期)2022-05-05
华东交通大学学报(2022年1期)2022-04-06
云南画报(2021年11期)2022-01-18
装备维修技术(2020年33期)2020-08-10
科技视界(2020年8期)2020-05-18
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
下一代英才(2018年4期)2018-05-21
科学与财富(2018年9期)2018-05-14
