
基于改进三维后向投影的多圈圆迹SAR相干三维成像方法
2021-01-25 03:42周良将焦泽坤吴一戎
电子与信息学报 2021年1期
韩 冬 周良将* 焦泽坤 吴一戎
①(中国科学院空天信息创新研究院 北京 100190)
②(微波成像技术国家级重点实验室 北京 100190)
③(中国科学院大学 北京 100049)
1 引言
直线合成孔径雷达 (Linear Synthetic Aperture Radar, LSAR)在一个合成孔径时间内对目标的观测角度变化有限,因此其2维成像结果中存在叠掩、阴影和透视缩短等常见问题,利用阵列或重航过的观测方式可具备3维成像能力[1,2]。圆周合成孔径雷达(Circular Synthetic Aperture Radar, CSAR)[3]利用雷达平台的曲线运动可以实现目标的3 60◦全方位观测,也是一种经典的雷达3维成像模型[4]。
后向投影(Back Projection, BP)算法是常用的CSAR时域成像算法。然而,BP算法逐方位脉冲逐成像网格处理的本质导致其算法复杂度高,成像效率低。针对BP算法成像效率低的问题,国内外相关学者提出了一系列快速BP算法,如局部后向投影(Locality Back Projection, LBP)算法[5],极坐标子孔径处理的快速后向投影(Fast Back Projection, FBP)算法[6],快速分解后向投影(Fast Factorized BP, FFBP)算法[7]等。同时,3维BP算法要对3维网格做成像处理,算法复杂度更高,耗时更长。因此,改进CSAR 3维BP成像算法、提升3维成像效率具有重要意义。
1998年,Ishimaru等学者[8]提出了CSAR共焦3维成像理论(CIA)。CSAR的2维成像结果取决于成像平面高度设置。当目标处于正确成像高度时会精确聚焦,而处于错误成像高度时会散焦成圆环。利用该原理逐高度面成像,可以得到CSAR的3维成像结果。虽然CSAR在距离方位平面内可以得到亚波长级的分辨率,但是高程向有效带宽的限制导致其高程向分辨率很低[9]。通过不同入射角轨道的多圈CSAR观测,可以达到拓宽高程向信号带宽的目的,提升高程向分辨率[10,11]。
综上所述,3维BP算法效率低下和高程向分辨率低下这两种弊端严重限制了单圈CSAR 3维成像的实际工程应用。因此,本文提出一种基于改进3维后向投影的多圈CSAR相干3维成像方法。可以在保证3维成像精度的前提下,达到提升CSAR 3维成像效率和提升高程向分辨率的目的。仿真的圆锥和GOTCHA数据3维成像结果表明本文所提方法为多圈CSAR联合高分辨、高效率3维成像提供了一种新的实现方案。
2 多圈CSAR相干3维成像理论分析


其中, Kr1=Kminsin α , Kr2=Kmaxsin α, CSAR高程向有效带宽与信号载频、带宽等系统参数有关。
改变入射角 α,将CSAR的高程向PSF相干积累,得到多圈CSAR模型的高程向PSF为

图1 CSAR 3维成像几何模型示意


3 改进3维后向投影算法
3.1 算法原理


图2 CSAR改进3维BP几何插值核构造示意
循环2结束;
循环1结束。
3.2 算法复杂度分析
传统3维BP算法逐方位脉冲逐网格点做插值和相位补偿操作,虽然成像结果精确,但是成像效率低下。本文基于构造几何插值核的CSAR改进3维BP算法减少了插值和相位补偿操作,转化为1维向量搜索操作,能够实现可接受误差范围内的更高效率3维BP成像。

4 仿真实验结果
4.1 圆锥目标改进3维BP成像仿真
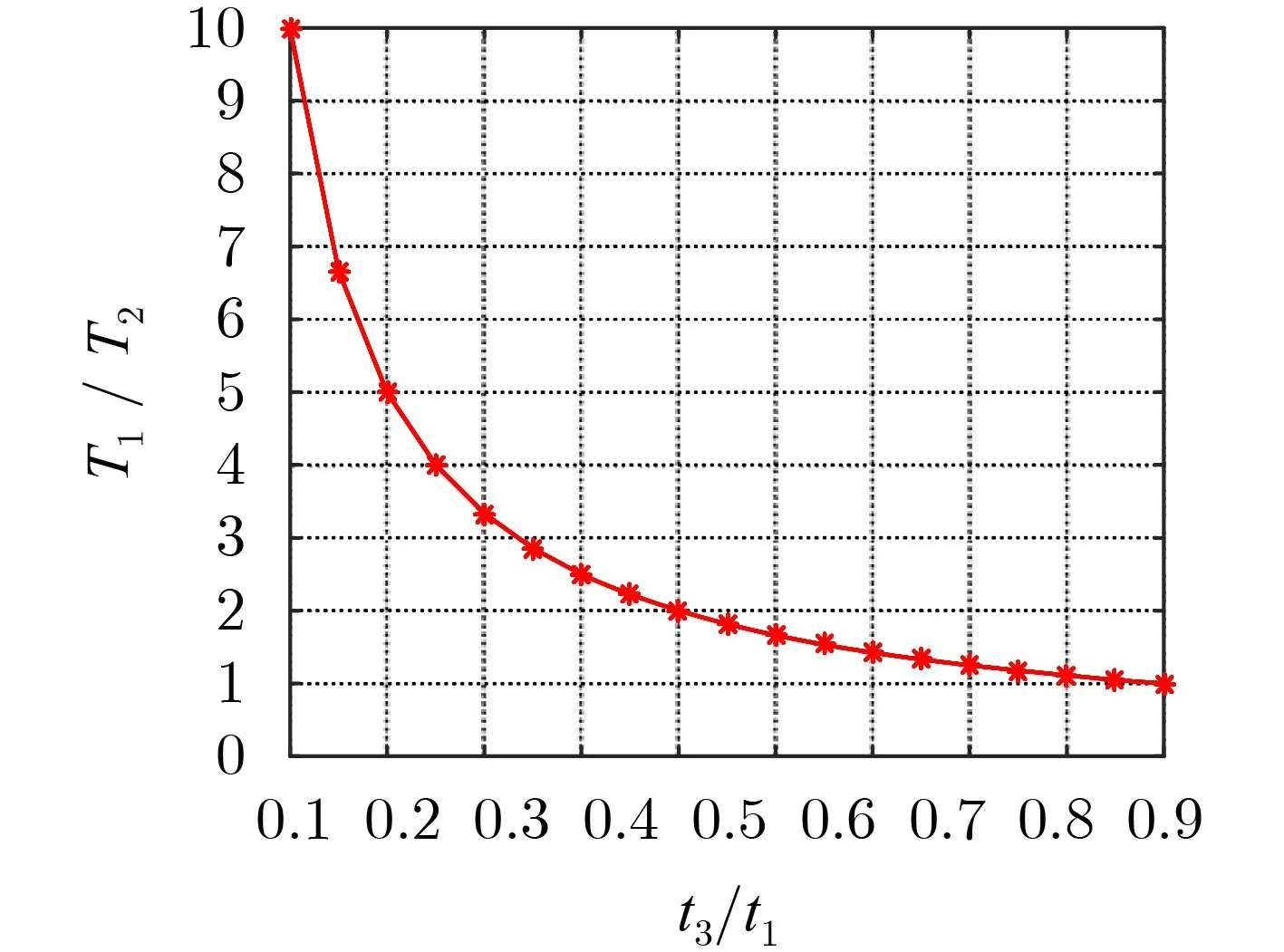
图3 算法耗时比变化曲线
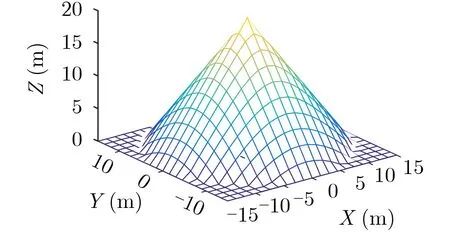
图4 仿真圆锥目标
仿真圆锥目标如图4所示,圆锥底面半径为15 m ,高度为2 0 m 。成像场景大小为50 m×50 m×20 m ,均匀划分成大小为5 01×501×101的3维成像网格,构造几何插值核长度为5001。雷达信号载频为1.5 GHz,带宽为200 MHz,分别在入射角为30°, 40°, 50°和60°的条件下进行3维成像。
采用MATLAB软件,处理器为i5-2400,圆锥目标单圈CSAR传统3维BP成像耗时和所提改进3维BP成像耗时对比如表1所示,传统3维BP成像算法耗时是所提算法耗时的2.8970倍。

表1 圆锥目标传统3维BP成像与改进3维BP成像耗时对比(s)
圆锥目标单圈CSAR改进3维BP成像结果与切片,以及多圈CSAR改进3维BP成像相干积累结果与切片如图5所示。相比于单圈CSAR,多圈CSAR相干3维成像结果具有更优的高程分辨能力。
4.2 GOTCHA数据改进3维BP成像结果
GOTCHA数据仿真所用Toyota Camry汽车光学图像及其回波信号生成模型示意如图6所示。
成像场景大小为 10 m×10 m×1.5 m,均匀划分成大小为 501×501×21的3维成像网格,构造几何插值核长度为5001, 360°全孔径均匀划分为60个互不重叠的子孔径。雷达信号载频为9.6 GHz,带宽为669 MHz,分别在入射角为30°, 40°, 50°和60°的条件下进行3维成像。
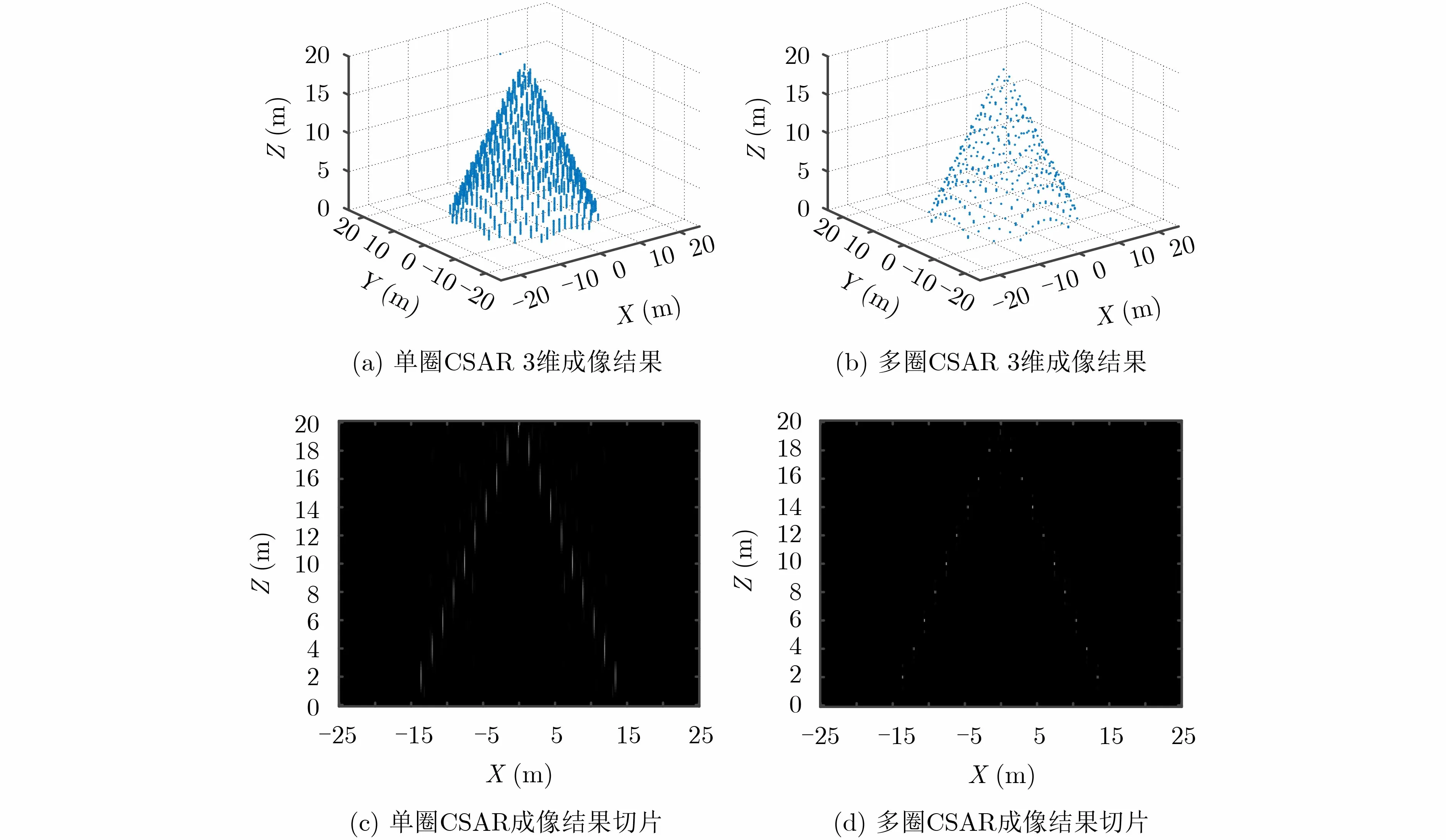
图5 圆锥目标CSAR改进3维BP成像结果与切片

图6 Camry汽车光学图像与回波信号生成模型示意
汽车属于散射特性随着观测角度变化较大的各向异性目标。因此,子孔径成像结果之间做广义似然比检验(Test of Generalized Likelihood Ratio,GLRT)可以得到较好的3维成像结果[14,15]。对每个子孔径回波进行改进3维BP成像,将每个子孔径不同轨道的改进3维BP成像结果相干积累后得到该子孔径下的改进3维BP成像结果。选取各子孔径3维成像结果中对应网格位置的强度最大值作为该网格处的最终成像结果。
仿真采用MATLAB软件,处理器为i5-2400,GOTCHA数据单圈CSAR传统3维BP成像耗时和所提改进3维BP成像耗时对比如表2所示,传统3维BP成像算法耗时是所提算法耗时的2.9598倍。

表2 GOTCHA数据传统3维BP成像与改进3维BP成像耗时对比(s)
雷达入射角为30°的GOTCHA数据单圈CSAR改进3维BP成像结果与切片,以及多圈CSAR改进3维BP成像相干积累结果与切片如图7所示。相比于单圈CSAR,多圈CSAR相干3维成像结果具有更优的高程分辨能力。
5 结束语
圆迹SAR对目标进行360°全方位观测,有效地解决了条带SAR存在的叠掩问题,是一种典型的合成孔径雷达3维成像模型。然而,高程向的低分辨率以及3维BP成像算法的低效率严重限制了单圈CSAR 3维成像的实际工程应用。因此,本文提出一种基于改进3维后向投影的多圈CSAR相干3维成像方法。针对单圈CSAR 3维成像的局限性,提供了一种新的解决思路。仿真的圆锥目标和GOTCHA数据3维成像结果验证了本文所提方法的正确性和有效性。
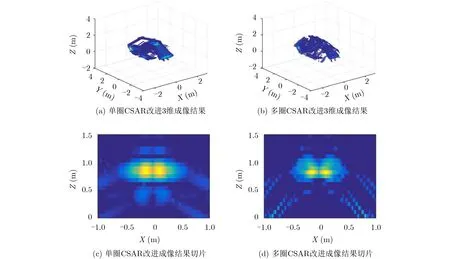
图7 GOTCHA数据CSAR改进3维BP成像结果与切片
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
青海师范大学学报(自然科学版)(2021年2期)2021-12-20
中等数学(2021年6期)2021-08-14
小学生学习指导(高年级)(2021年6期)2021-06-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
哈尔滨轴承(2021年4期)2021-03-08
西南石油大学学报(自然科学版)(2019年1期)2019-01-28
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年14期)2016-04-11
宜春学院学报(2015年3期)2015-01-13
