
面向6G的高分辨率无线信道频域仿真方法及定位技术研究
2021-01-25 03:48李元杰
电子与信息学报 2021年1期
李元杰 董 超 牛 凯
(北京邮电大学 北京 100876)
1 引言
随着无线通信系统的逐步发展,定位技术在其中扮演着越来越重要的角色。在6G愿景中,定位服务将与通信、计算、控制和感知等功能进行更深度的融合,构成多功能、高聚合度、高效率的网络[1]。文献[2]也提出了增强的定位服务嵌入超密度移动网络中的架构,以提供更好的网络服务。并且定位的精度要求也从5G时代的2维空间10 cm提升到3维空间1 cm[3]。6G系统的设计特性为高分辨率定位的实现创造了条件,也对一些现有技术提出了挑战。
首先,定位系统需要适应6G的信道特点。因为定位系统当中重要的一环是对信道中蕴含的到达时间(Time Of Arrival,TOA)和到达角(Angle Of Arrival, AOA)等传播参数的估计(并且TOA估计也是AOA估计的基础环节)。6G网络在THz频段以下的最大带宽约为1 GHz,典型带宽为300~800 MHz[4],这意味着信号在空间中的厘米级传播将导致在信道模型中出现小数时延。要设计和测试高分辨率定位系统,必须先在信道仿真实现中体现高分辨率的时延,以准确还原实际场景的传播环境对定位信号和算法产生的影响。
经典的高分辨率信道仿真实现方案是时域过采样方法[5]。只要过采样阶数充分大,就可以对信道当中的小数采样时延参数进行精确仿真。但是过采样方法的弊端在于其复杂度随着过采样阶数的增加而指数增加,并且在实现过程中滤波器的因果性要通过截断窗函数来近似保证。另一种实现方案是多速率有限冲激响应(Finite Impulse Response,FIR)滤波器组[6]。与过采样方法不同,该方法通过线性插值或多相结构滤波器组来实现与过采样方法相同的效果,并且复杂度更低。然而当所需过采样阶数增高时,滤波器设计的复杂度以及滤波过程所带来的时延开销也会急剧增大。因此需要设计一种低复杂度但与过采样方法保持相同高精度的信道仿真实现方案。
其次,该系统的实现依赖于6G系统的分布式网络架构[4]。分布式锚点系统可以给定位系统提供更细的坐标划分,更多的锚点数量,更完善的覆盖,这些都能为定位精度的提升创造有利条件。但是该系统也存在时钟漂移导致的同步问题。6G系统要求系统同步误差在1 ns水平[4],但1 ns的同步误差将会导致30 cm的定位误差,通信能够容忍的同步误差在高分辨率定位要求下变得不可接受。传统的基于匹配滤波的TOA估计和极大似然定位的系统[7]由于严重依赖系统的同步性,在没有任何外部信息输入的条件下难以克服上述同步误差带来的影响[8]。文献[9]采用节点优选法优化了到达时间差(Time Difference Of Arrival, TDOA)并取得了较好的定位结果;文献[10]采用半定松弛方法进一步优化了TDOA下的位置解算,适应更大的同步误差。但是在6G分布式场景中,基站与基站以及基站与锚点间均存在随机的同步误差,TDOA机制难以从根本上解决该问题。而基于往返时间(Round Trip Time, RTT)的定位方案[11]虽然可以使用同源时钟克服上述同步误差,但需要上下行链路的双向交互和持续进行的调度配合才能完成定位,对空口设计的要求高。因此该场景下的定位系统应该能够对抗同步误差,并且只需要单次链路传输和异步时钟系统。
最后,6G中多入多出(Multi-Input Multi-Output,MIMO)支持的天线规模将进一步增长,超大规模MIMO(ultra-massive MIMO)的应用为信号参数提供了更多的维度[12],尤其为高分辨率的AOA估计提供了保障。
基于上述分析,本文提出了一种新的面向6G的高分辨率无线信道频域仿真方法及定位技术;在信道仿真实现方面,采用频域等效的方法在信道中引入小数时延,利用时频等效将时域过采样过程转换为频域处理,在降低复杂度的同时直接产生基带采样率下的等效时频域信道响应;而在定位技术方面,设计了基于首到达径估计的AOA定位系统。虽然时延检测依然是AOA定位的基础,但是由于AOA信息不依赖于测量出的绝对时间,其检测只需要通过检测首到达径来完成,因此可以不受同步误差的影响并且利用大规模天线的增益完成高精度定位。
2 信号结构与系统模型
2.1 定位信号建模
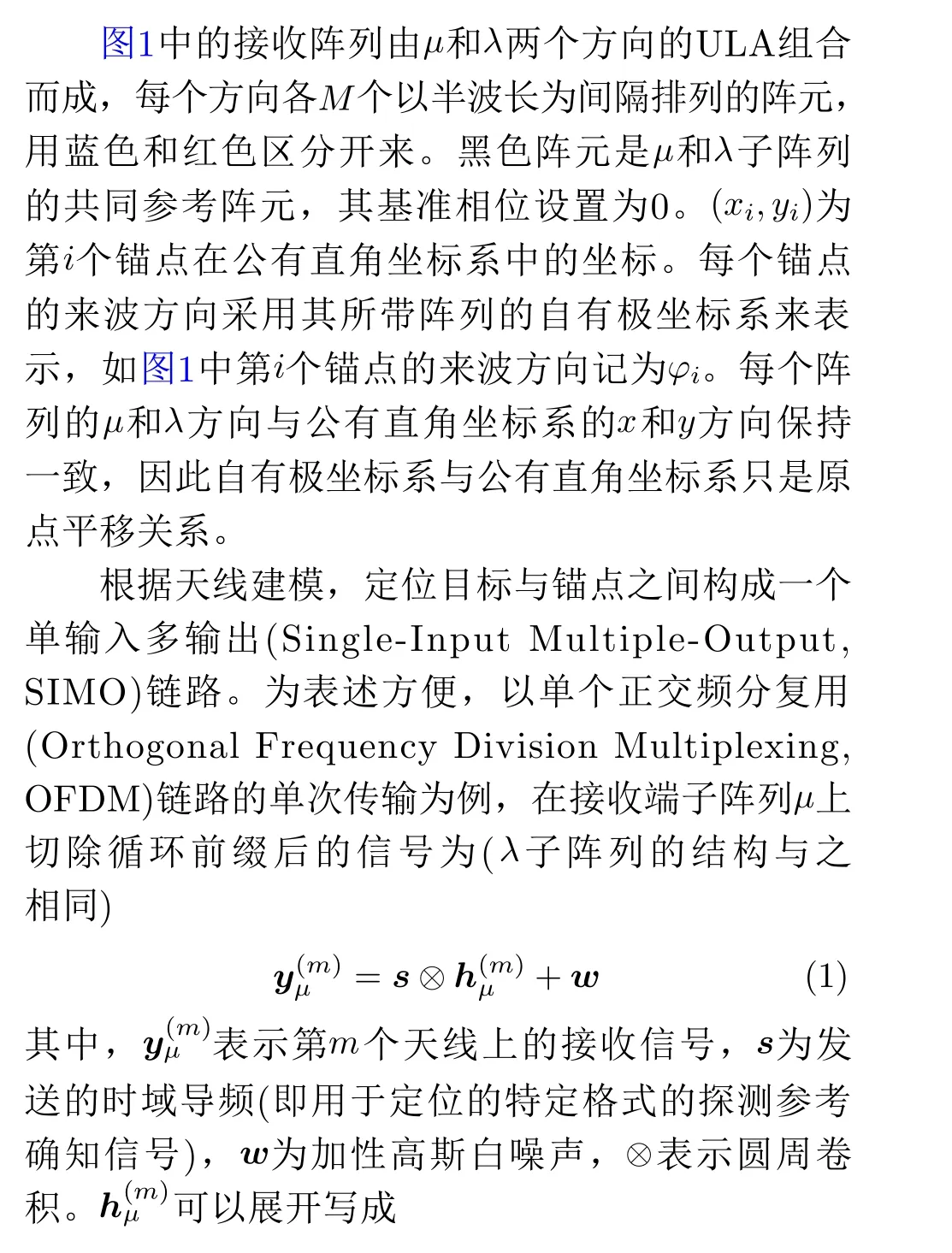
AOA信息蕴含于阵列天线接收信号之间的相位差当中,并且与阵列天线的几何结构有关。为了简化系统,同时结合实际系统配置,每个锚点上的接收阵列建模为如图1所示的双ULA组合结构。

图1 接收阵列结构

2.2 定位系统框架
在一般的定位系统中,定位信息的承载者是设计好的现有信号,即定位导频。而定位的几何结构由锚点与定位目标之间的空间关系决定。定位参数信息则蕴含在导频所经历的信道当中,例如信道的传播时延(TOA)或由到达角引起阵列间相位差(AOA)等等。通过特定的接收端算法对信号中的定位参量信息进行估计,再根据几何结构进行位置的联合解算,这是定位系统的一般架构,如图2所示。
由图2可知,若要对高分辨率定位系统进行仿真,必须首先保证实现高分辨率的信道仿真。同时,定位算法也可以拆分为参数估计部分与位置解算部分。因此本文也按照该结构来展开。在第3节将介绍基于频域变换的高分辨率信道仿真,作为时延定位参量在信道中引入的基础。而在第4节中,基于首到达径检测的AOA估计算法以及基于AOA信息的位置估计方法构成整个定位方案。
3 高分辨率信道仿真
在前面的论述中,最基本的高分辨率信道仿真方法是过采样。而本文中将要提出的高分辨率信道仿真方法也源自于对过采样的频域等效,将时域过采样过程转换为频域处理。此时信道实现为基带信号与等效基带信道响应的直接作用(频域乘积或时域卷积),从而避开了复杂的升降采样和滤波操作,减少了对过采样信号中冗余信息的处理,使得信道实现在基带采样率下完成。具体方法分为如下3个步骤。
3.1 信道参数生成
3.2 线性变换矩阵生成

图2 定位系统的一般架构
3.3 等效频域变换

4 高分辨率定位技术
4.1 基于首到达径检测的AOA估计算法
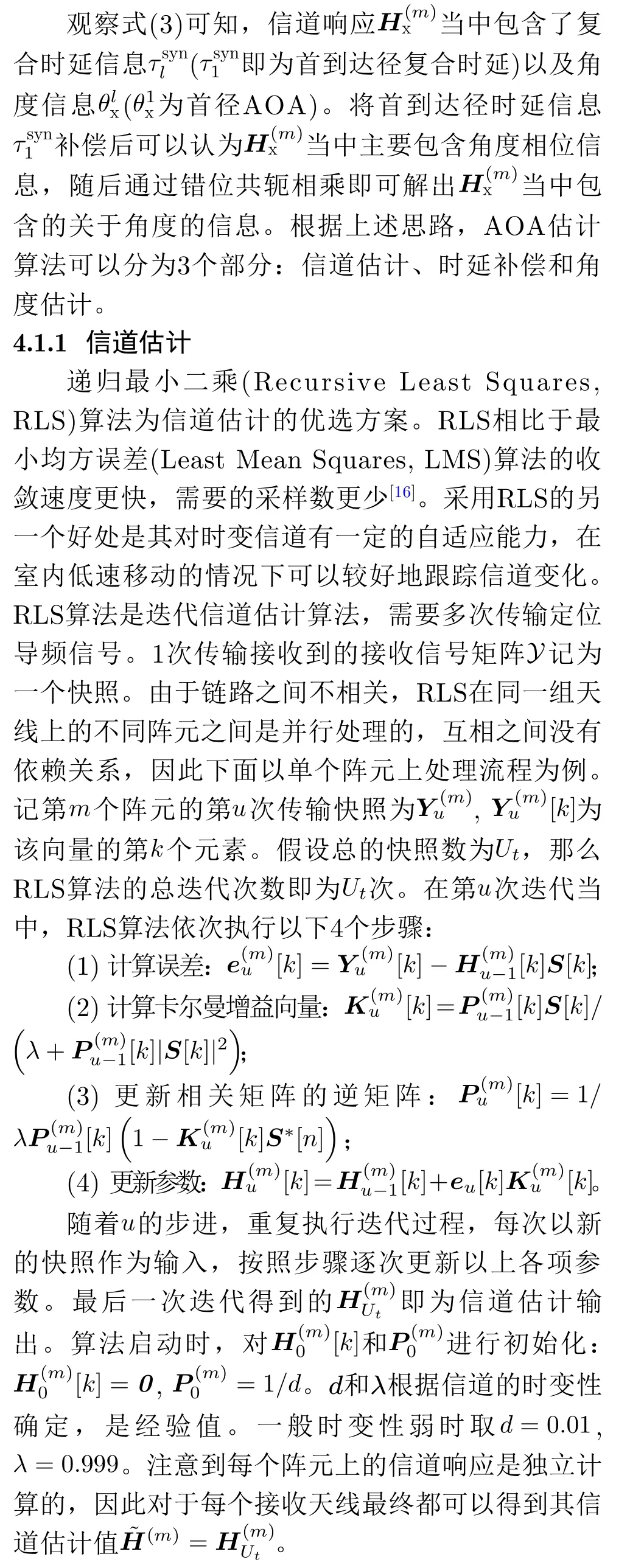
4.1.2 时延补偿
在得到信道响应后,利用傅里叶变换的性质可以进行时延估计[17]

4.2 基于AOA信息的位置估计算法
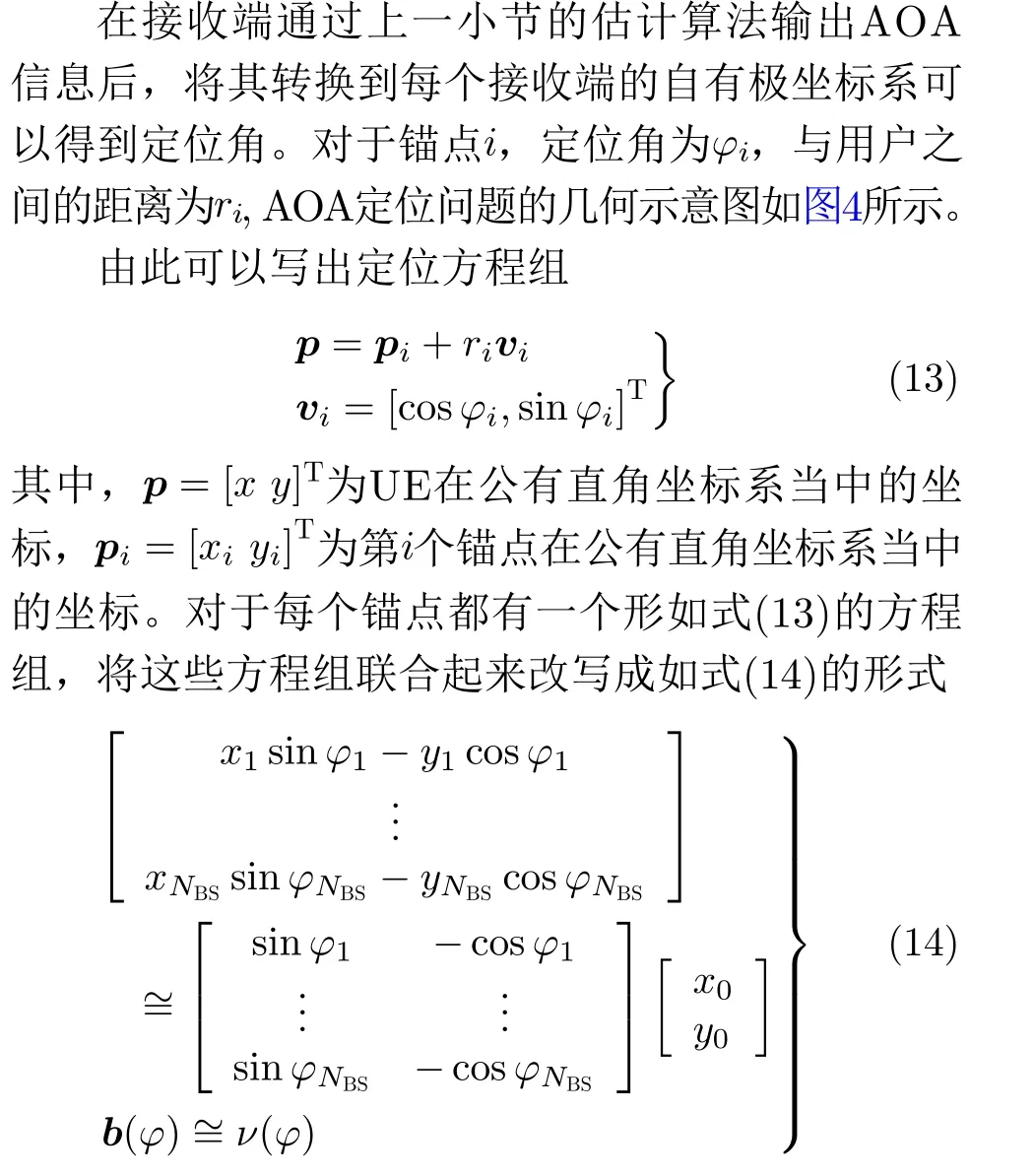

图3 基于首到达径检测的AOA估计算法流程
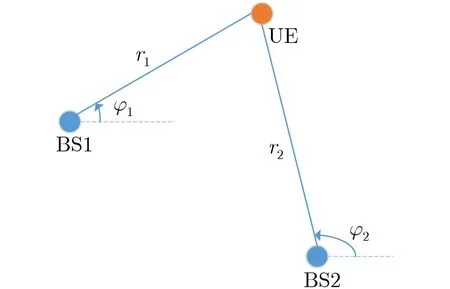
图4 AOA定位问题的几何关系

5 数值仿真
本节将给出高分辨率无线信道频域仿真方法和定位技术分别在实际参数信道模型和标准场景当中的数值仿真性能。根据前面的系统设计,高分辨率信道仿真也将作为信道实现模块应用在定位系统的场景仿真当中。
5.1 高分辨率信道仿真
根据前述推导,时域过采样方法是高精度信道仿真的对比方案,拥有最优的理论性能和最高的实现复杂度。而频域等效方法是不妥协精度的低复杂度实现方案。复杂度分析的部分在3.3节已经给出,而本节选取3GPP TS38.901[19]给出的SISO TDL-D信道模型仿真其实际性能,以频域等效方法与过采样方法分别产生的信道响应的均方误差作为性能指标。设定基带采样率为122.88 MHz,时延扩展因子为20 ns,归一化最大多普勒频移为0.001,多普勒频移特性为Jakes谱。同时过采样倍率设定为恰好能够将最接近的两径分量分辨开来的q =32。
在衰落信道下测试仿真方案的方法是考察其对信道统计特性的模拟能力,时选衰落体现为功率延时特性,而频选衰落体现为多普勒功率谱。在图5(a)当中可以观察到,频域等效和时域过采样方法产生的功率延时特性差别很小,且二者产生的等效信道响应的均方误差为 2.17×10−3。频域方法的离散演示谱经过sinc插值后与信道的原始抽头平均功率参数吻合。图5(b)说明该方案也能以较高的精度来模拟信道的时选衰落。上述结果充分说明频域等效方案能够在根据TDL信道模型产生具有双选特性的信道响应时取得与过采样方案非常接近的性能表现,达到了高分辨率的要求。
5.2 高分辨率定位算法仿真
定位算法仿真按照2.2节的框架进行。首先根据3GPP TS38.901 Indoor-Office场景构建一个120 m×50 m大小、含有12个定位锚点的室内空间[19]。同时设定场景中的同步误差服从方差为σTe=50 ns的截短高斯分布,其截断位置为[ −2σTe, 2σTe],具体参见3GPP TS38.855[20]。接着生成上行发送的SRS信号,SRS信号的产生与资源映射方式参照TS 38.211[21]。然后运行高分辨率信道仿真算法,为每条定位链路生成等效SIMO信道响应。锚点接收到信号后,定位中心先根据各锚点接收信号功率进行锚点优选(留下最高质量的3个锚点),再执行高分辨率定位算法,最后得出定位结果。
图6中共有3种方案参与对比,分别是基于AOA的高分辨率定位算法“AOA”、基于TOA信息采用匹配滤波器(Matched Filter,MF)进行TOA检测的定位算法“MF”以及华为在文献[22]中提出的基于TDOA的定位方案“HW”。“同步”和“非同步”分别表示测试场景中是否加入按照前述方式建模的同步误差。结果表明,AOA定位的效果能够显著对抗同步误差,并且取得比完美同步下基于TOA和TDOA的算法更好的性能,50%概率定位误差小于20 cm。虽然AOA算法在90%以上的概率收敛性由于阵列对极端入射角的象限判断会出现模糊导致大误差而比MF差,但是总体来说在90%性能线以前都能达到比理想下的MF算法更高的精度(极端角度的点只分布在特殊位置,只占整个场景面积的一小部分)。

图6 定位误差经验累积概率函数
6 结论
本文的主要工作有两部分:高分辨率的信道仿真以及高分辨率的位置估计算法。信道仿真将时域过采样处理转换为频域处理,能以低复杂度实现高时延分辨率的参数信道,从而为6G信道的数值仿真和针对这些场景的各项新算法的测试提供了基础。更进一步地,本文将基于首到达径检测的AOA估计与基于AOA信息的TLS位置估计算法结合起来,实现了高精度的位置估计,同时为存在同步误差的6G分布式网络当中的高分辨率定位提供了解决方案。并且该定位方案的导频采用与普通空口信号一致的信号格式,有助于导频的多用化,符合6G深度融合网络的设计目标。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
通信电源技术(2021年2期)2021-05-21
电子技术与软件工程(2020年22期)2021-01-30
数字技术与应用(2020年12期)2021-01-22
雷达学报(2020年3期)2020-07-13
移动通信(2020年5期)2020-06-08
雷达学报(2018年3期)2018-07-18
火控雷达技术(2016年1期)2016-02-06
太空探索(2015年8期)2015-07-18
电测与仪表(2015年3期)2015-04-09
