基于拓展杠杆法的8速行星齿轮机构的设计
2021-01-22 02:58文强
机械工程师 2021年1期
文强
(柳州职业技术学院汽车工程学院,广西柳州545006)
0 引言
行星机构式自动变速器(简称自动变速器或AT)的主要部件包括了液力变矩器和行星齿轮变速机构,而这两大部件工作状态决定着自动变速器的传递效率。液力变矩器具有自动离合器、吸收振动、减少换挡冲击、可在一定范围内无级变速、变矩的优点。但在某些工况下,液力变矩器具有传递效率低、油耗增加的不足之处。挡位数的增加,使得发动机在低燃油消耗率区域工作的可能性增加,降低油耗[1]。而且,传动比范围广、挡位数多更有利于改善车辆的燃油消耗率。多挡位化已成为自动变速器发展的趋势,自动变速器的多挡位要求更多的行星排机构串联、并联来实现。
杠杆法在研究、分析和设计自动变速器的动力方案时具有直观、简单的特点,由于原有的杠杆法在分析多挡位自动变速器时具有一定的局限性,因此需要对原有的杠杆法进行拓展和改进。国内许多学者和研究人员对杠杆法做了大量的研究。黄宗益等[2]提出了运用杠杆法来分析和合成多行星排机构的动力传递方案;张国芬等[3]提出利用杠杆法并联双排行星齿轮机构的设计;尤明福等[4-5]在原有的杠杆法的基础上进行了拓展和改进,并验证了拓展和改进的杠杆法是合理可行的;侯国强等[6-7]利用拓展和改进后的杠杆法对奔驰7速自动变速器、ZF9速自动变速器的换挡过程进行了分析。
更多行星排齿轮机构的串联、并联的连接方式,可以实现更多挡位动力传递,但这给执行元件的布置带来一定的困难。在自动变速器结构中,两行星排最好的连接关系是两行星排的同名元件相连,在这种结构中轴的叠套最少[8],且便于执行元件结构位置的布置。分析表明:拉维娜两行星排结构中两行星排的行星架刚性连接,两行星排的两齿圈刚性连接,因此,拉维娜结构满足不同行星排之间元件的最好连接关系。在满足车辆最小传动比的条件下,增加挡位数量及增加超速挡数量,都能有效地提升自动变速器的传递效率、降低油耗。本文将利用拓展的杠杆法,在拉维娜结构基础上,研究和设计出一套8速行星齿轮机构的新型动力传递方案。动力传递方案中包含有多个超速挡,以便提升自动变速器的传递效率、降低油耗。同时,利用平面图形判定法检验了8速行星齿轮机构新结构中的各行星排元件和执行元件位置之间的布置关系无几何干涉现象,因此,该8速行星齿轮机构的动力传递方案及其对应的结构是可以合理布置并实现的。
1 等效杠杆法的拓展
1.1 等效杠杆法的拓展
在分析和研究自动变速器的方法中,杠杆法具有直观、简单、明了的特点。杠杆法包括等效杠杆输出点分析图法和等效传动杠杆图法。文献[8]指出:在等效杠杆输出点分析图法中,1个行星排结构的3个元件(即行星架、太阳轮、齿圈)分别对应1个支点;若多个行星排并联或串联时,不同行星排之间刚性连接的元件共用1个支点,且在某些情况下可以适当地调整支点的位置。多行星排数和多挡位数成为自动变速器发展的趋势,支点数也在增加,而原有的杠杆法只有5个支点,因此,需要对原有的杠杆法进行拓展和改进。文献[4]~[7]都对原有的杠杆法进行了拓展和改进,通过对已有的杠杆法进行研究、分析和拓展,得出本文拓展和改进后的等效杠杆输出点分析图法,如图1所示。在图1中:1)有A、B、C、D四个支点;2)为了便于分析,将自动变速器输入轴转速单元化,即输入轴转速为1,且0<k1<k2<1;3)k1表示经过传动比为1/k1的某减速机构通过执行元件与支点连接,或者与支点刚性连接;4)k2表示经过传动比为1/k2的某减速机构通过执行元件与支点连接,或者与支点刚性连接;5)C支点与自动变速器的输出轴刚性连接;C支点的转速大于1,该挡为超速挡;C支点的转速大于0且小于1,该挡为减速挡;C支点的转速小于0,该挡为倒挡;C支点的转速等于1,该挡为直接挡。
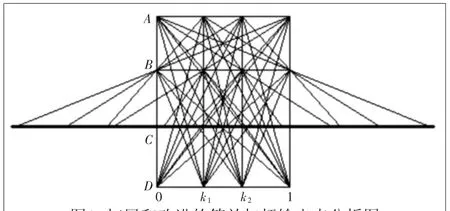
图1 拓展和改进的等效杠杆输出点分析图
1.2 8速等效杠杆输出点分析图的选择
通过对图1的分析表明:拓展和改进后的等效杠杆输出点分析图中有30个减速挡、1个直接挡、4个超速挡、4个倒挡。根据自动变速器换挡过程的单一切换原则[8-9],以及执行元件位置布置的制约,只有部分挡位能在一套动力传递方案中使用。分析表明:1)在图1中,若使用2组独立的行星排结构形成传动比分别为1/k1、1/k2的减速机构,势必会造成执行元件数量的增加,同时,将使自动变速器的结构更复杂、增加自动变速器的质量和生产成本。因此,在减速机构中可以将两行星排以并联连接的方式联立,且有常输入,这将减少执行元件使用的数量;但是,并联式的减速机构中,不能同时形成1/k1、1/k2的传动比。2)支点A分别与自动变速器壳、减速机构、输入轴的3个连接点(通过执行元件连接),支点B分别与减速机构、输入轴的两个连接点(通过执行元件连接),支点D与减速机构的连接点(通过执行元件连接),这6个连接点的执行元件布置位置相互制约,因此,使用这6个连接点(即6个执行元件)形成的挡位不能同时出现在同一组动力传递方案中,但某一动力传递方案中可以选用其中的几个连接点。根据以上的挡位选用原则,本文选出了3组8速行星齿轮机构的等效杠杆输出点分析图,如图2所示。

图2 3组8速行星齿轮机构的等效杠杆输出点分析图
通过对图2的分析表明:图2(b)、图2(c)的2种动力传递方案都需要8个执行元件实现8个前进挡和2个倒挡;而图2(a)的动力传递方案可以使用7个执行元件来实现8个前进挡和2个倒挡,且图2(a)的动力传递方案中有3个超速挡,前进挡传动比范围更广。在自动变速器动力传递方案中,在最小传动比满足车辆动力需要的情况下,增加挡位数、增加传动比的范围及增加超速挡数都能有效地提升自动变速器的传递效率、降低油耗[10]。因此,8速行星齿轮机构的等效杠杆输出点分析图优先选用图2(a)。
2 拉维娜结构
拉维娜结构包含2个行星排结构,两行星排的行星架刚性连接、齿圈刚性连接,如图3所示。因此,拉维娜结构中的两行星排连接关系满足自动变速器中两行星排最好的连接关系,在这种结构中轴的叠套最少,执行元件结构位置布置方便,不易出现交叉的现象。因此,在新设计的8速行星齿轮机构中选用拉维娜结构作为其结构基础。
3 8速行星齿轮机构

图3 拉维娜结构简图
经过择优选择,8速行星齿轮机构的等效杠杆输出点分析图如图4所示。8速行星齿轮机构选用拉维娜结构作为基础结构,除此之外还有2个行星排并联组成的减速机构。通过对各挡位的动力传递及各行星排的旋转方向分析,减速机构选用单行星轮行星排和双行星排行星排并联连接的结构,减速机构的传动简图如图5所示。减速机构中使用了常输入(即行星排元件与自动变速的输入轴刚性连接),以便减少执行元件的数量,从而降低自动变速器结构的复杂性,降低生产成本及故障概率。

图4 8速行星齿轮机构的等效杠杆输出点分析图
将图3、图5相结合,并利用等效杠杆输出点分析 图,8 速行星齿轮机构的传动简图如图6 所示。图6 中,从左往右依次为第一行星排(双行星轮行星排)、第二行星排(单行星轮行星排)、第三行星排(双行星轮行星排)、第四行星排(单行星轮行星排),其中第一、二行星排为拉维娜结构。8速行星齿轮机构等效传动杠杆图如图7所示。
4 8速行星齿轮机构动力传递方案的确定
4.1 各挡位传动比的确定

图5 减速机构的传动简图

图6 8速行星齿轮机构的传动简图
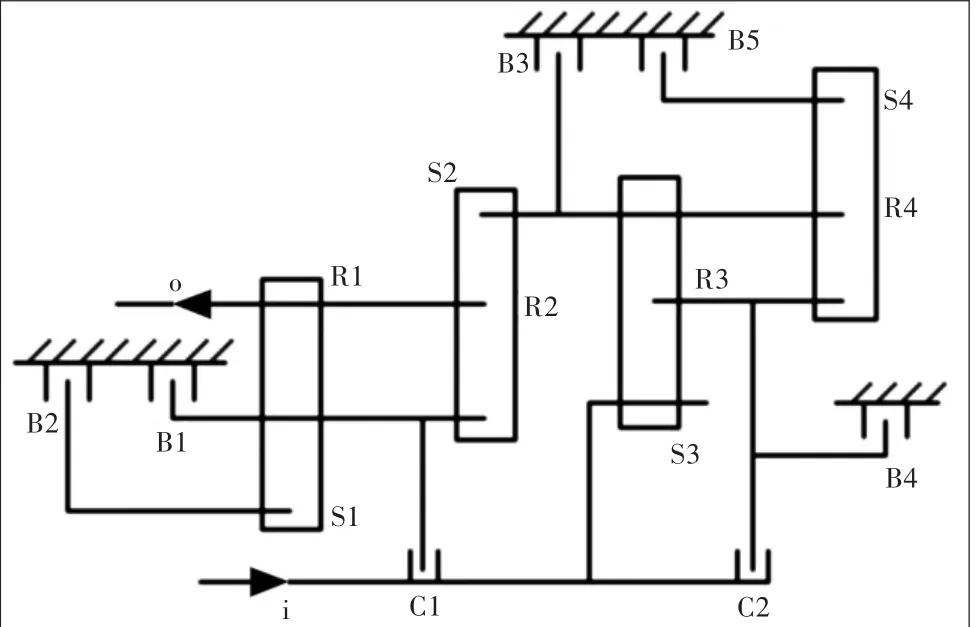
图7 8速行星齿轮机构的等效传动杠杆图
通过对图4的研究和分析,利用传动比的计算公式来计算出8速行星齿轮机构动力传递方案中各挡位的传动比,各挡位的传动比如表1所示。从表1中可知,8速行星齿轮机构动力传递方案中有3个超速挡(即D6、D7、D8挡),超速挡位数量的增加可以有效提高车辆的动力传动效率和改善车辆的燃油经济性。
4.2 各挡位工作执行元件的确定
行星排式自动变速器的升降挡是通过切换执行元件的工作状态来实现的。对图4、图6、图7进行研究和分析,得出8速行星齿轮机构动力传递方案各挡位的执行元件工作状态,如表2所示。从表2中可以看出,8速行星齿轮机构动力传递方案的换挡过程满足单一切换原则,即分离一个执行元件和接合另一个执行元件。在换挡过程中,执行元件切换工作状态次数少,这有利于简化挡位切换的过程,减少换挡过程中产生的换挡冲击,降低车辆的换挡顿挫感,改善车辆的乘坐舒适性。

表1 各挡位的传动比

表2 各挡位工作的执行元件
5 平面图形判定法
利用平面图形法[11]来判定执行元件位置和行星排结构布置关系在实际方案中是否会发生几何干涉问题。图8为新8速行星齿轮机构动力传递方案的结构平面图形判定图。通过对图8的研究和分析表明,新8速行星齿轮机构动力传递方案结构中的行星排结构和执行元件位置的布置关系不存在交叉和干涉的现象。因此,新8速行星齿轮机构动力传递方案与其对应结构中的行星排和执行元件布置关系在实际方案中是可以合理布置并实现的。

图8 新8速行星齿轮机构动力传递方案的结构平面图形判定图
6 结论
液力变矩器在某些工况下具有传动效率低、油耗高的不足之处,本文利用拓展的杠杆法设计了一套8速行星齿轮机构的动力传递方案,方案中包含有等效杠杆输出点分析图、等效杠杆传动图、动力传递简图、各挡传动比及各挡的工作执行元件。8速行星齿轮机构的动力传递方案中传动比范围广,且具有3个超速挡,这能有效提高车辆的动力传递效率和改善车辆的燃油经济性;同时,该方案的换挡过程满足执行元件的单一切换原则,这有利于降低自动变速器换挡过程的冲击,减少换挡过程的顿挫感,从而提高车辆的乘坐舒适性。利用平面判定图形法检验8速行星齿轮机构动力传递方案结构中的行星排结构和执行元件位置的布置关系不存在交叉和干涉的现象,该方案在实际中是可以合理布置并实现的。
猜你喜欢
数学大王·低年级(2021年2期)2021-02-21
小学阅读指南·低年级版(2020年11期)2020-11-16
汽车实用技术(2018年15期)2018-08-29
现代装饰(2018年3期)2018-05-22
汽车维修技师(2017年6期)2017-11-18
潍坊学院学报(2017年2期)2017-04-20
试题与研究·中考物理(2014年3期)2015-05-11
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
湖南大学学报·自然科学版(2014年2期)2014-12-25