核电站巡检应急履带机器人越障分析
2021-01-22 02:57李彰朱性利吴学洲
机械工程师 2021年1期
李彰,朱性利,吴学洲
(中核武汉核电运行技术股份有限公司,武汉430200)
0 引言
核电站的安全正常运行是保证社会和经济安全稳定发展的重要保障,对核电站的巡检、检修和发生突发事件时的应急救援非常重要。由于核电站内部存在的辐射会对操作人员的生命安全造成严重危害,因此需要采用专用机器人替代人员进入核电站实施各类应急操作。2011年,日本福岛核电站发生重大安全事故,反应堆内的核燃料发生融毁,造成了严重的核泄漏事故,各种类型的机器人被派入福岛核电站内部进行事故的实地勘察和事故后环境辐射剂量的监测,如由iRobot公司生产的Packbot、Warrior履带移动机器人及日本千叶工业大学的Quince机器人,这些机器人的加入对于探查事故现场和掌握事故后核岛的环境情况起到了至关重要的作用。
核电站内部障碍物较多,平台上存在各类阶梯、凸台和平铺管线,平台间以栅格板楼梯相连,核电站事故后的环境更甚之,这些都对机器人的越障能力提出了较高的要求,因此机器人的运动可达性是核电站应急机器人首先需要具备的能力。移动机器人主要有轮式、履带式和足式等3种形式。轮式移动机器人在平地上具有极高的稳定性和运动效率,但是越障能力稍显不足,足式移动机器人对于复杂地形则具有与生俱来的适应性,但是足式的稳定性略显不足,其对于控制技术的要求也相对较高。履带式移动机器人则兼具了平地的运动效率和复杂地形的通过能力,其在特种机器人领域中被广泛研究和应用[1-4]。然而,为提高履带机器人在核电站复杂环境的地形适应性,在设计之初需结合核电站的具体环境进行越障性能分析及越障能力的核验,许多学者就各类型履带机器人的越障性能做了大量的相关研究[5-8]。本文将针对核电站环境的关键特征,设计一种双摆臂履带式机器人,通过不同地形的越障性能分析与核验,分析履带机器人对于核电站复杂地形的适应性,并搭建双摆臂履带式机器人样机及其控制系统。
1 履带机器人模型
针对核电站复杂环境的越障需求,履带机器人需要克服的主要障碍物为斜坡、阶梯和楼梯,其中机器人需要至少能具备跨越200 mm高的垂直障碍物及300 mm宽的壕沟。针对这一环境特点,履带机器人采用双摆臂履带形式,三维模型如图1所示。在平地移动时将摆臂收起,主履带在地面可实现前进后退及原地转弯,运动稳定可靠,当机器人移动平台需要跨越障碍物及攀爬楼梯时,通过摆臂的摆动来调整机器人的姿态,进而控制机器人移动平台跨越障碍物及攀爬楼梯。

图1 核电站应急履带机器人三维模型
图1所示的机载机械臂主要用于异物夹取,该机械臂执行机构展开长度为1.2 m,末端负载能力约10 kg,当机器人在平地上机械臂处于完全展开时,机器人工况如图2所示,机器人受力倾翻计算为:9.8×(10×800+10×200)<9.8×130×600,9.8×(10×890+10×290)<9.8×130×310。
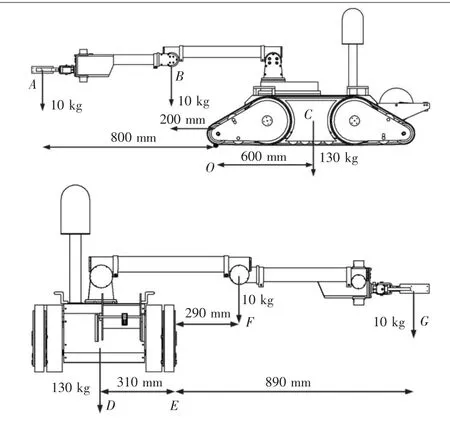
图2 机器臂展开工况示意图
通过计算发现,当机器人处于满负载在上述工况下时,负载产生的转矩小于机器人自重产生的转矩,机器人不会发生倾翻现象。
对于履带机器人上下坡的情况,当机器人在上坡时机械臂处于完全展开的状态,此时双机械臂的重心投影会更加靠近主履带重心位置,故机器人不会发生倾翻。但是,当机器人下坡时双机械臂的重心远离主履带重心,因此需将双机械臂调整至主履带后侧使重心后移,防止机器人倾翻。机器人在爬越单阶梯和爬楼梯的过程中,其几何形态与爬坡时的完全一样,因此上阶梯和楼梯时机器人不会发生倾翻,下阶梯和楼梯时则与下坡时一样,需将机械臂调整至主履带后侧使重心后移,防止机器人倾翻。因此,只需调整机械臂的位形即可调整机械臂对于履带机器人重心的影响。
由于履带机器人在越障时需将机械臂调整至收缩状态,以使机械臂重心对履带越障的影响最小,故当机械臂完全处于收缩状态时,机械臂和履带机器人本体可简化为一个整体,重点分析履带机器人在越障时系统参数对于越障性能的影响。为了获得此时整机的重心坐标,建立固连于主履带后轮毂中心的局部坐标系,如图3所示。其中沿驱动轮与从动轮轮毂中心连线O1O2方向为局部坐标系x轴正方向。整机的重心坐标(l,h)可通过如下公式计算获得:
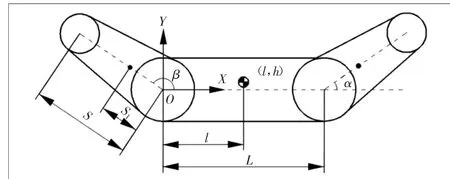
图3 双臂履带机器人重心及坐标系定义
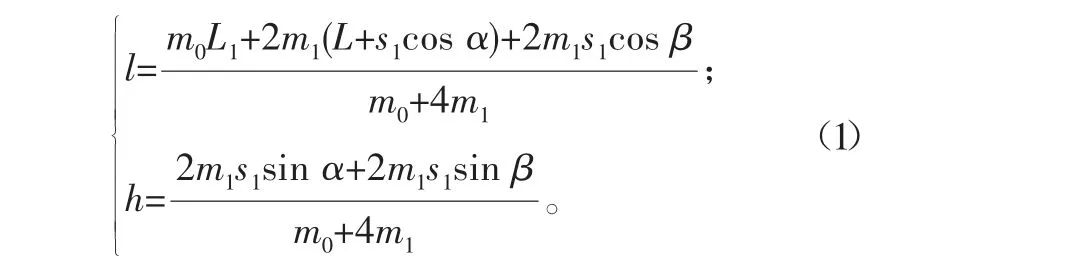
其中:m0和m1分别为履带机器人主体和单摆臂的质量;L为履带机器人主履带驱动轮中心距;s为单摆臂履带轮中心距;s1为单摆臂重心到主履带驱动轮轴的距离;α和β分别为前后摆臂相对主体机身的转角。
该履带机器人的系统参数如表1所示。
2 履带机器人越障分析
为确认双摆臂履带机器人在核电站中的地形适应性,本节主要以阶梯、楼梯和沟壑等4种障碍地形为目标,以双摆臂履带机器人系统参数对越障能力的影响作为主要分析对象,对于双摆臂履带机器人的越障能力和地形通过性进行计算分析,并对履带机器人的设计提供依据。
2.1 阶梯攀爬
当履带机器人前方障碍物高度小于履带驱动轮半径时,机器人平台驱动底盘摆臂无需做任何的改变,摆臂可处于与主体机身垂直的位置,此时双摆臂履带机器人的阶梯翻越能力可简化为机器人主履带的越障能力分析,如图4所示。当履带机器人遇到阶梯时,履带机器人会在履带与阶梯角的支撑力作用下使前轮毂抬起并由履带运动带动机器人攀上阶梯,直至履带机器人的重心越过阶梯角,机器人会在重心作用下使机器人整体旋转,前轮毂落于阶梯上,而后轮毂离地。
此过程中,履带机器人与地面间的倾角为γ,障碍物阶梯高度为H,则有以下公式:


表1 履带机器人系统参数

图4 机器人主履带越障爬梯示意图
其中:R为主履带驱动轮半径。该函数中R、l、h三者均为已知数,则可绘制出障碍物高度H与机器人底盘倾角γ的关系图,如图5所示。
从图中可以看出,机器人可跨越的障碍物高度经历了一个随着机器人机身倾角先增大后减小的过程,其中关键拐点为机器人倾角到达45°左右时,可跨越的障碍物高度达到最大125 mm。也就是说,仅凭主履带运动,该机器人能够跨越的最大高度为125 mm。障碍物高度过高,即使增加机器人机身倾角,其重心位置也无法越过阶梯,也就无法通过重力作用将机器人牵引过障碍物。而且机身倾角过大,机器人容易倾翻。从计算公式也能看到,适当增加机器人主履带驱动轮半径R和驱动轮中心距L,可以提高机器人的可跨越障碍物的高度H。
对于仅有主履带的情况,若阶梯高度增加,履带机器人翻越阶梯和重心越过阶梯角所需的倾角则会逐渐增加,当阶梯高度过高使重心无法越过时,机器人继续运动就会发生整机倾翻,此时则需要摆臂的协助才能完成任务。具有双摆臂的履带机器人攀越阶梯的过程可分为4步:1)将前摆臂摆至阶梯高度以上,如图6的姿态A;2)通过前摆臂的顺时针翻转,使机器人主体逐渐被抬起,质心逐渐上升至姿态B;3)逆时针翻转后摆臂当机器人质心在阶梯拐角时顺时针翻转前摆臂至姿态C;4)当机器人继续前进,促使重心越过阶梯角,机器人会绕着阶梯角旋转,使机器人落于阶梯上,后摆臂脱离地面,到达姿态D,机器人成功翻越障碍物阶梯。在这个过程中,A和C的状态为机器人越障的两个关键状态,而C状态直接决定了机器人能够跨越的最大高度。

图5 障碍物高度H与机器人底盘倾角γ的关系示意图

图6 机器人跨越障碍物示意图
1)A状态:机器人刚触及阶梯。当机器人面对前方的高障碍物可转动前摆臂,当前摆臂履带触及阶梯拐角后以前摆臂的驱动力将机器人主体机身拉起,如图7所示。障碍物的高度越高,前摆臂的转角越大。可跨越障碍物的高度H计算公式为

可跨越障碍物的高度会随着前摆臂转角的增加而增加,当前摆臂与水平方向夹角为70°时,可跨越障碍物高度约为400 mm。从式(3)中可知,适当增加单摆臂履带轮中心距s和主履带驱动轮半径R可增加机器人的可跨越障碍物高度。

图7 机器人接触阶梯的A状态
2)C状态:机器人跨越阶梯。C状态中机器人通过后摆臂的转动将机器人的整机重心抬高到能够跨越障碍物的高度,为机器人越障的关键姿态。此时,机器人与只有主履带越障时的情况一样,整机的重心需越过阶梯角,通过重力作用使机器人攀越阶梯,如图8所示。
机器人越过障碍物阶梯需满足以下公式:
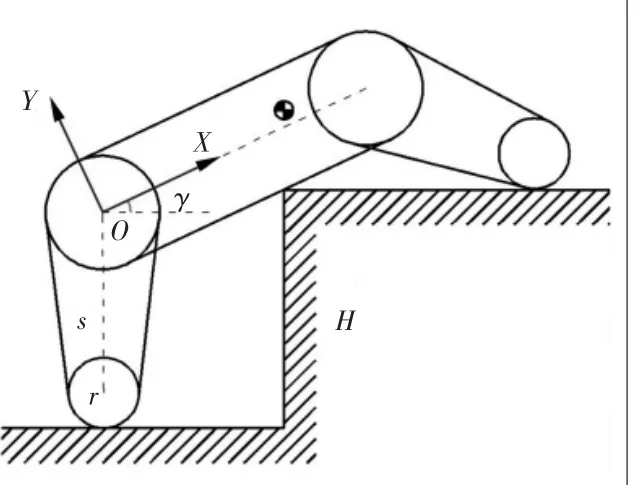
图8 双摆臂机器人跨越阶梯关键姿态


其中:r为前摆臂履带从动轮半径;s为单摆臂履带轮中心距。以后摆臂与水平地面垂直为极限位置,代入机器人结构参数,可绘制出障碍物高度H与机器人主体机身倾角γ的关系图,如图9所示。
与图5所示的仅有主履带时的情况相比,具有双摆臂的履带机器人的可跨越阶梯高度得到了显著提高,其可跨越的最大障碍物高度可达440 mm,其对应的机身倾角约50°。当障碍物高度大于440 mm时,即使机器人增加机身倾角,其重心位置也无法越过阶梯角,也就无法通过重力作用将机器人牵引过障碍物。机身倾角过大,机器人也容易倾翻。从计算公式能看到,适当增加机器人前摆臂履带从动轮半径r、单摆臂履带轮中心距s和驱动轮中心距L,可以提高机器人的可跨越障碍物的高度H。
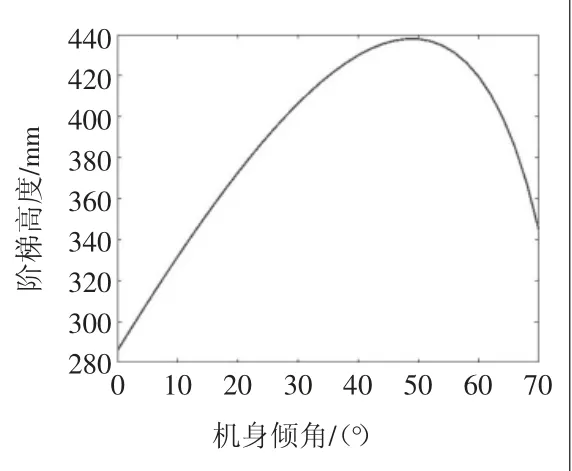
图9 障碍物高度H与机器人主体机身倾角γ的关系图

图10 高阶梯障碍物跨越过程示意图
除此之外,处于C状态的机器人可跨越的障碍物高度440 mm大于处于A状态的机器人可跨越障碍物高度400 mm,仅靠机器人转动前摆臂去接触阶梯实现440 mm的越障已然无法实现,可以按照图10所示的运动顺序实现较高阶梯的初始接触:先通过后摆臂的运动将机身重心抬升至一个较高的高度,当主履带接触阶梯角后,后摆臂转至水平,然后通过后摆臂与主体机身的联动,再次将机身重心抬高,当重心越过阶梯角后,机器人同样会在重力作用下使机器人攀越过阶梯。
2.2 楼梯攀爬
当障碍物阶梯为连续阶梯时便成为楼梯,机器人攀爬楼梯与跨越障碍物阶梯方法一致,其过程如图11所示。

图11 楼梯越障示意图
此过程中,机器人攀爬第一节楼梯与跨越阶梯障碍物过程动作一致,当机器人成功跨过第一节楼梯时,保持姿态D,通过履带在楼梯上以斜坡的形式往上爬行,当到达最后一节台阶时,采用跨越障碍物时的姿态爬上最后一节台阶。
机器人除了应满足跨越阶梯障碍物时的条件外,还应满足另外两个条件:1)当后摆臂离开一个台阶时,履带机器人的整机重心投影应已越过前一个阶梯的阶梯角,防止机器人因重力作用后倾;2)当前后摆臂靠近地面的履带端与主履带共线时,机器人在地面上的运动履带长度应该大于两个阶梯的连续长度。因此,机器人的越障结构参数应满足以下公式:
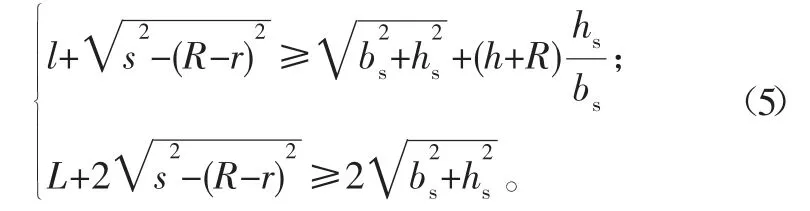
其中:bs和hs分别为楼梯单阶梯的深度和高度。以核岛环境结果为依据,通过代入机器人的结构参数,发现该履带机器人机器人满足所有楼梯的连续攀爬需求。当楼梯每节台阶间隔距离较大无法采用姿态D爬行时,可将楼梯等效为多个障碍物连续攀爬,其能攀爬楼梯的每节高度与楼梯整体角度与跨越阶梯障碍物一致。
2.3 沟壑跨越
双摆臂履带机器人跨越壕沟障碍物的关键在于越障过程中前后摆臂的支撑作用。当机器人在跨越时,首先将前后摆臂旋转至姿态A,如图12所示,即前后摆的下段履带与主履带共线,此时实际与地面接触的履带长度增加。当履带机器人在跨越沟壑,前摆臂前端刚接触沟壑另一侧及重心刚进入沟壑上方,此时沟壑的宽度是履带机器人能够正常越障的最大宽度,即机器人可跨越沟壑的最大跨度W为

图12 机器人跨越壕沟示意图

代入履带机器人参数可知,该机器人可跨越的壕沟最大宽度为575 mm。
3 履带机器人样机及其控制系统搭建
针对核电站阶梯、楼梯的越障需求,通过双摆臂履带机器人的越障分析,图1所示的履带机器人能够满足核电站的地形通过性要求,因此形成图13所示的双摆臂履带机器人本体,并搭建了图14所示的核电站应急机器人系统及其控制系统。

图13 双摆臂履带机器人本体

图14 核电站应急机器人系统
履带机器人控制系统主要由遥控端、底盘受控端两部分组成,其中:遥控端控制系统主要由电源、主控板、功能按键、无线数据模块、光纤数据模块、无线图传模块、光纤图传模块、DVR、液晶驱动板、液晶显示屏等组成,用于发送控制信息,实现对底盘的遥操作,同时接收底盘回传的图像信息、状态信息,并实时显示;底盘控制系统主要由电源、主控板、传感器、照明系统、无线数据模块、光纤数据模块、电动机驱动系统、无线图传模块、光纤图传模块、视频分割器、云台、手抓摄像头、车体摄像头等组成,用于收集图像信息及车载传感器信息统一回传,同时接收遥控端指令并解析,实现底盘运动控制。
4 结论
本文针对核电站巡检和应急救援情况下对于机器人地形适应性和通过性的要求,设计了具有较强越障能力的双摆臂履带机器人,并通过分析系统参数与越障能力的关系,建立了双摆臂履带机器人越障性能分析的参数理论模型,对低阶梯、高阶梯、楼梯和沟壑等多种障碍物环境进行了越障性能研究,结果发现设计的双摆臂履带机器人能够满足核电站中低阶梯、高阶梯、楼梯和沟壑等障碍物的越障需求,并搭建了双摆臂履带机器人及其控制系统。
猜你喜欢
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
文学少年(有声彩绘)(2017年9期)2017-10-23
人大建设(2017年12期)2017-08-15
小布老虎(2017年3期)2017-08-10
石油化工建设(2017年2期)2017-06-05
幸福(2016年9期)2016-12-01
小天使·一年级语数英综合(2016年4期)2016-11-19
学苑创造·B版(2016年4期)2016-04-14
读者·校园版(2015年16期)2015-05-14