基于SVM与RF的无人机高光谱农作物精细分类
2021-01-20 09:42阳昌霞刘汉湖
河南科学 2020年12期
阳昌霞, 刘汉湖, 张 春
(1.成都理工大学地球科学学院,成都 610059;2.成都理工大学国土资源部地学空间信息技术重点实验室,成都 610059)
快速有效的农作物识别与分类是农业遥感应用基础,它为农作物种植面积估算、农作物病虫害监测以及预防、农作物长势监测以及农作物产量估算等提供了有力依据[1]. 早期对植被进行精细分类主要采用人工地面调查,这种方法需耗费大量的财力物力[2]. 如今,随着遥感技术的发展,使用遥感技术进行农作物分类已经成为研究热点之一. 传统的遥感监测方法主要采用星载或机载多光谱影像. 陈杰等[3]使用QUICKBIRD影像对农作物和树种进行分类和识别;彭光雄等[4]利用TM等多时相遥感影像对农作物进行识别. 但是由于普通的多光谱影像分辨率较低、波段数目少,往往导致分类农作物的分类结果精度有限,某些小面积种植产物无法识别等问题,而高分辨率的多光谱影像获取成本较高.
高光谱遥感技术是近年来迅速发展起来的一种对地观测的技术,其影像具有“图谱合一”、波段数目多、信息量大等显著优势[5-8]. 由于不同作物间光谱信息存在一定差异,这种差异提高了作物间的可分性,当前已有许多学者利用高光谱影像对农作物进行精细分类,并取得了一定成果. 余铭等[9]结合AVIRIS数据提出了一种基于条件随机场的高光谱遥感农作物精细分类方法,对研究区内农作物进行精细分类,刘亮等利用高光谱遥感数据采用分层分类的分类方法对农作物信息进行提取和挖掘[10]. 虞佳维等利用高光谱数据对黄淮海地区的三种农林植被进行分类取得了较高的分类精度[2]. 但是高光谱数据在维数增加、信息量增大的同时也带来了Hughes现象、信息冗余量大等问题,且普通星载或者大型机载高光谱影像存在空间分辨率低、数据获取成本较高等问题,因此如何更充分有效地利用高光谱数据对农作物进行精细分类是当前研究亟待解决的问题.
近年来,轻小型成像光谱仪的研制迅速将无人机高光谱的研究推向热潮,无人机遥感具有分辨率高、操作简单、影像获取成本低等优势[11-12],且无人机高光谱遥感相对于普通高光谱遥感具有更高的空间分辨率.目前已有诸多学者运用无人机高光谱影像对农作物信息进行提取,兰玉彬等利用无人机高光谱遥感对研究区内的柑橘黄龙病进行监测,为柑橘黄龙病的防治与管理提供有力依据[13];梁辉等使用无人机高光谱影像对水稻的光合性能成功进行监测[14]. 陶惠林等采用无人机高光谱影像与植物长势指标相结合对冬小麦长势进行监测[15];程雪等[16]、田明璐等[17]使用无人机高光谱遥感对农作物的叶面积信息进行提取;杨红艳利用无人机高光谱遥感对荒漠草原上的物种进行分类,研究结果为内蒙古地区荒漠草原的物种覆盖度估算、退化演替判断、牧场管理提供一定的数据支撑,为荒漠草原的生态恢复提供研究基础[18],Ishida利用无人机高光谱数据对植被进行精细分类,分类结果精度高达94.5%[19]. 利用无人机高光谱数据对农作物信息进行提取为农作物估产、农情监测等提供了有力依据.
无人机高光谱遥感兼备了高空间分辨率以及高光谱分辨率的优点,能够精细地捕捉地物的光谱信息,国内外许多学者利用无人机高光谱数据对农林植被信息进行提取大大提高了结果精度、降低了研究成本、弥补了传统方法费时费力的不足,但是现有的研究多基于对某类农作物进行定性定量化研究;或对于单个分类模型,如支持向量机分类法(Support Vector Machine,SVM)或者随机森林(Random Forest,RF)分类法的研究,对于两类模型对比研究较少. 因此,为响应国家农业精细化的号召,实现对农作物更加精确的管理和监测,本文以高分辨率的无人机高光谱作为研究数据,采用当前分类结果精度较高的两类分类方法支持向量机分类法(SVM)[5]以及随机森林(RF)分类算法[20-21];通过对高分辨率的无人机高光谱影像进行特征提取,对研究区影像中农作物进行提取,为研究区内农作物精细管理提供有力支撑.
1 材料和方法
1.1 研究区概况
研究区位于四川省江油市马角坝境内漆树湾地区. 马角坝地区位于四川省江油市境内,地理坐标为东经105°04′,北纬32°05′. 马角坝地区西南距江油市62 km,距成都市214 km,马角坝地理位置图如图1所示. 穿过马角坝境内的铁路线有宝成铁路,成都—光源高速以及108 国道也穿过马角坝研究区境内,除此之外马角坝地区还有其他公路若干,由此可见马角坝地区交通较为发达. 影像获取时研究区主要种植农作物有玉米、大豆、芋头、水稻等.

图1 研究区地理位置与无人机多光谱影像拼接图Fig.1 Location of the study area and stitching chart of UAV spectral images
1.2 数据采集与预处理
1)无人机多光谱数据:无人机多光谱数据是由大疆精灵4Pro无人机搭载1英寸2000万像素Exmor RCMOS传感器获取的,总共获取马角坝漆树湾地区影像740幅. 对无人机多光谱数据的预处理主要包括研究区影像的拼接以及研究区正射影像的生成;研究区无人机影像的拼接使用软件为Photoscan. 无人机多光谱数据分辨率高,能从影像上识别各类地物,主要用于辅助分类以及分类精度检验.
2)无人机高光谱影像数据:无人机高光谱影像数据是由大疆M600Pro型无人机搭载芬兰生产的SENOP RIKOLA 型成像光谱仪获取,SENOP RIKOLA 型成像光谱仪的工作波长范围为500~900 nm,光谱分辨率为10 nm,当飞行高度为100 m时地面分辨率为6.5 cm,最大光谱影像分辨率为1010×1010像素,本次实验获取数据共有56个波段,波长范围从蓝光波段到近红外波段(504~889 nm). 数据获取于2018年8月28日上午,获取时研究区内天气晴朗无云,并对传感器进行暗电流校正以及白板校正,无人机飞行高度为120 m,飞行设定航速为5 m/s,影像处理软件为光谱仪自带软件以及提前设定的标准板进行辐射定标处理. 选取研究区内植被种类丰富的且植被生长状况不同的两幅无人机高光谱影像a和无人机影像b作为研究对象,对研究区内不同生长时期、不同农作物进行研究分析;其在研究区内位置及无人机多光谱影像拼接影像如图1所示.
1.3 训练样本提取
通过实地调查并参考无人机多光谱影像,结合影像进行目视解译,确定两幅影像中包含水稻、大豆、玉米、芋头、杂草、裸地、水泥道路等地物. 影像训练样本选取采用2×2像素大小ROI在影像中均匀选取,选择ROI时在玉米、大豆等有种植间距较大的影像上采用真彩色影像与假彩色影像以及近红外波段单波段混合选取,在影像波段合成无法判别时辅助以无人机多光谱影像,在训练样区选择完毕后. 将选择的训练样区按3∶2的比例随机分为两部分,将60%的ROI作为训练样本,另外40%样本用作分类精度检验的验证样区;并对每幅影像统计输出训练样区平均光谱曲线,作为研究区影像各地物的端元波谱曲线.
1.4 影像特征变换
1.4.1 数据降维 高光谱一个显著的特点在于高光谱影像数据维数高,与普通多光谱相比数据量大,信息丰富,但是在高光谱维数增高的同时也带来了数据信息冗余,数据处理效率低,数据的存储困难等问题. 因此为了提高分类效率以及分类精度,通常需要对高光谱影像数据进行降维处理,从而达到降低高光谱数据维数,又最大量地保留了高光谱影像的信息. 本文主要采用了最小噪声分离变换(Minimum Noise Fraction,MNF)对研究区无人机高光谱影像进行降维处理. 最小噪声分离变换(MNF)实际上由两次主成分变换构成[5],MNF变换将把数据空间分为两部分:一部分为大的特征值和相干特征影像;另一部分为近似值为1的特征值和噪音占主导地位的影像[22].
1.4.2 一阶微分变换 光谱导数法是高光谱特征提取的一种方法,该方法是指对反射光谱进行数学模拟,对光谱求取一阶导数(first-order derivative,FD). 光谱导数可以体现原光谱中识别不了的细微变换,也能提取出不同的特征参数,如吸收峰位置、植被红边位置等. 本文主要采用一阶微分变换对影像光谱进行处理.
1.5 农作物精细分类
1.5.1 分类方法 本研究使用经典的机器学习分类方法支持向量机(Support Vector Machine,SVM)分类法以及近年来比较流行的基于决策树分类器集成的分类法随机森林(Random Forest,RF)分类法,分别建立对研究区主要农作物的识别模型,对各个分类结果进行精度评价,并对两种分类方法进行比较分析.
其中SVM是一种以统计学习理论为基础的机器学习方法. SVM可以自动寻找对分类有较大区分能力的最优分离超平面,并构造出类器,可以将同类间间隔最小化,不同类的间隔最大化. 相对于传统的分类方法来说,支持向量机分类法分类结果精度更高,泛化能力强等优点,除此之外SVM 分类方法能有效地缓解Hughes现象,对于小样本且高维数据的分类比较适用[23-24].
随机森林算法是一种分类预测模型,是近年来比较流行的基于决策树分类器集成的算法,该算法是一种对参数选择不敏感,不存在过适应,分类结果稳定,学习训练速度较快的分类器集成算法,在解决多类问题上具有许多独特的优势[20-21]. 对于任意一个集合X采用有B棵树的随机森林进行分类,那么

1.5.2 分类模型建立 本研究主要以研究区两幅无人机高光谱影像为研究对象,在对研究区高光谱影像进行降维处理,一阶导数变化等基础上,采用支持向量机、随机森林两类分类方法分别对初始高光谱影像,降维后高光谱影像以及一阶导数光谱影像,对图像进行一阶导数变换后再对变换后影像进行MNF降维变换得到的影像进行研究区内主要农作物类型进行精细分类.
1.5.3 分类精度评价 本研究采用Kappa系数、总体精度(Overall Accuracy)、用户精度(User’s Accuracy)以及生产者精度(Producer’s Accuracy)等4个评价指标对高光谱影像分类结果进行了分类结果评价. Kappa系数的计算是基于混淆矩阵,常用于评价分类精度;四个评价指标常常用于分类结果精度的评价.
2 结果与分析
2.1 无人机高光谱影像数据分析
2.1.1 农作物光谱分析 无人机高光谱数据包含56 个波段,根据选取的训练样本可以得出主要农作物的波谱曲线如图2(a)所示. 在蓝光、绿光以及红光波段,四种主要农作物的反射率相似度较高,而在近红外波段农作物反射率陡增,其中大豆在近红外波段的反射率高于其他农作物以及杂草,芋头、水稻、杂草三种植被光谱相似度较高,玉米在近红外波段反射率最低. 主要原因是影像获取时研究区内大豆植株生长旺盛,水稻正处于灌浆期,而研究区内玉米处于趋于成熟期,其中一部分玉米已经收割,玉米植株在近红外波段的反射率没有其他几类植株高. 对研究区影像以及所获得的波谱曲线图分别求一阶微分,可以得到研究区一阶微分影像以及一阶微分波谱曲线,所得主要农作物一阶波谱曲线图如图2(b)所示,可见一阶微分光谱在蓝光、绿光、红光波段相对于原始光谱有一定区分度,但是在近红外波段,除大豆外其他植株一阶导数光谱曲线较为相似.
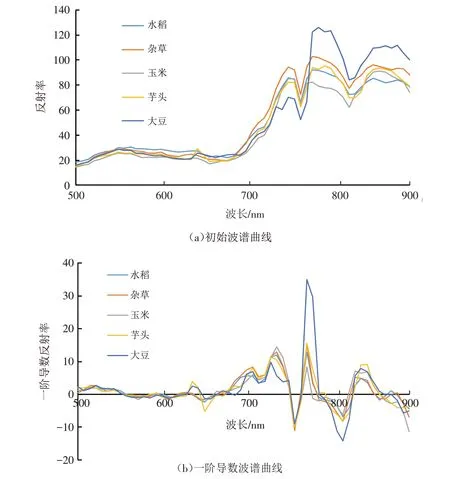
图2 主要植株波谱曲线图Fig.2 Main plants spectrum curve
2.1.2 数据降维结果分析 利用MNF降维变换对无人机高光谱影像数据进行降维处理,分别对初始高光谱影像和经过一阶导数变换后高光谱影像进行MNF降维变换. 变换后初始高光谱影像以及一阶高光谱影像前10个分量所包含信息量如表1所示,其中对原始影像进行降维变换后前十个分量所包含数据量约为91%左右,一阶导数变换后前十个分量包含数据为73%左右. 由表1可见,MNF降维变换对于一阶导数影像的降维效果与初始影像相比较差.
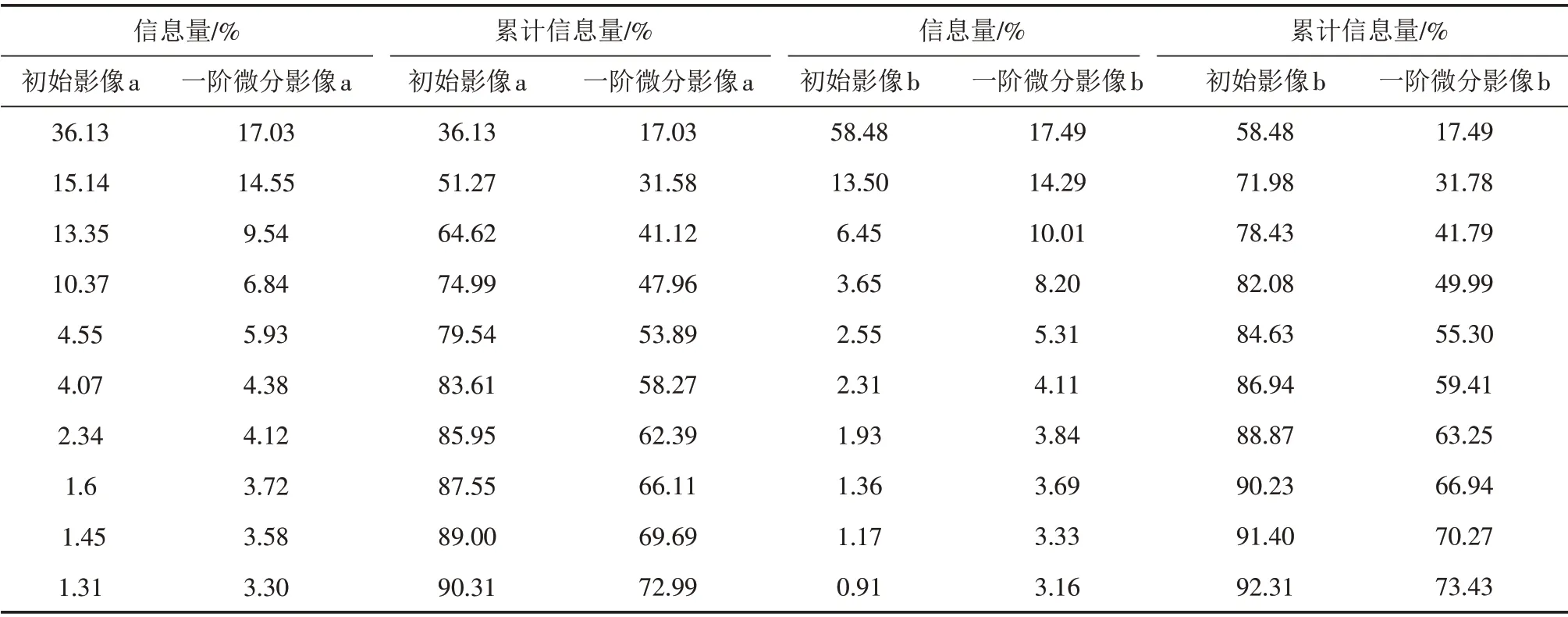
表1 MNF降维后前十个分量信息量Tab.1 First ten components of information after MNF
2.2 农作物提取分析
2.2.1 SVM分类结果分析 本文在前期数据处理的基础上分别对初始无人机高光谱影像、MNF降维变换后影像(MNF)、一阶导数变换影像(FD)以及一阶导数变换后再做降维变换影像(FD-MNF)采用支持向量机分类(SVM)方法对几种影像数据进行分类处理,以实现对研究区主要农作物的精细分类. 为了降低其他参数对分类结果的影像,再对每类影像分类时采用的支持向量机模型的参数都一致,选取径向基核函数(RBF)作为核函数. 分类结果如图3所示,每类分类结果精度如表2所示. SVM对研究区各主要农作物的分类精度高达81%以上,对无人机高光谱影像进行降维处理以后分类精度提高2%左右. 对初始影像做降维处理后选择前十个主成分再进行主要农作物的识别,一定程度上提高影像分类精度,而且大大降低了数据量,提高运算速度. 由此可见,对无人机高光谱影像进行数据降维处理不失为一种可行的方法. 而进行一阶导数变换后影像分类精度降低了1%~5%不等,分析原因为虽然一阶导数变换提高了某些农作物可分性,突出了一部分农作物的光谱信息,但多数农作物间光谱相似性提高,降低了大多数农作物间的可分性.
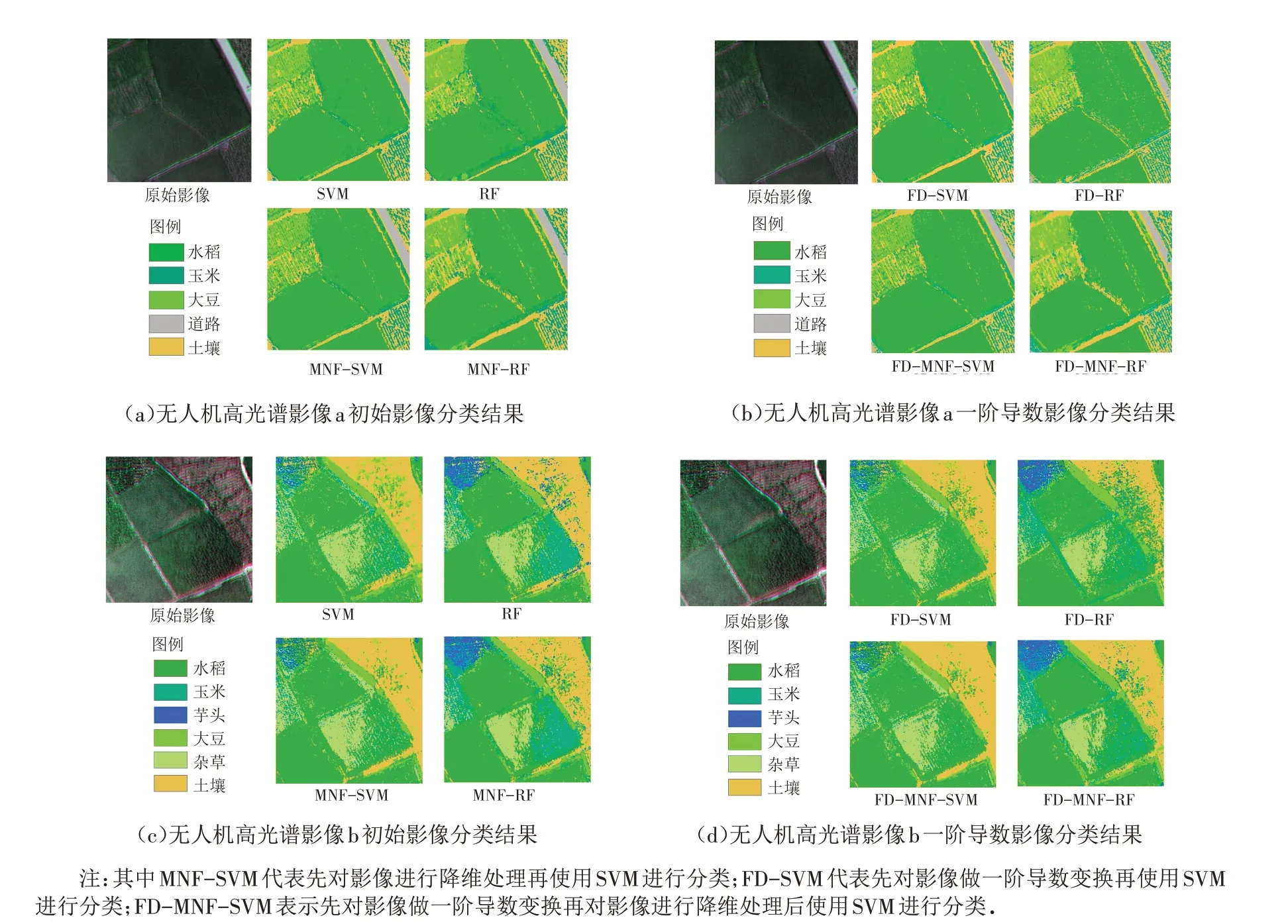
图3 各分类模型分类结果图Fig.3 Classification results for each classification model
2.2.2 RF 分类结果分析 随机森林算法属于机器学习的一大分支——集成学习法(Ensemble Learning),它是由多棵决策树构成,在本次研究中,为了方便本次研究进行,经过多次实验并查阅文献,将本次研究随机森林树中决策树的数目选取为500棵[26],特征的数量为特征数的平方根,每个节点的不纯度通过GINI系数求解. 采用RF 分类方法对研究区数据处理后四幅影像主要农作物进行精细分类,分类结果如图5 所示,分类精度评价如表2 所示. 由表可见两幅初始影像采用RF 分类方法分类精度均为88%以上,并且对影像进行降维处理后分类结果精度差提高,然而一阶导数影像同样出现了结果精度下降的现象,下降幅度在2%~4%不等.
2.2.3 对比分析与讨论 根据表3所示,两幅影像的分类结果中,随机森林分类方法的分类精度比支持向量机分类精度高1%~5%,所有影像中一阶导数影像采用各种分类方法分类精度最低;且两类影像在做降维换后选取前十个影像分类后影像分类结果精度提高,分类效率提高. 每类地物类型采用不同分类模型分类所得的生产者精度以及用户精度如表3所示,针对原始的全波段影像分类结果进行分析,对比所有运用SVM与
RF分类模型所得分类结果的农作物生产者精度和用户精度,可以发现RF分类方法两者精度相对于SVM有较明显改善,尤其是对大豆、水稻等农作物的监测效果更优.
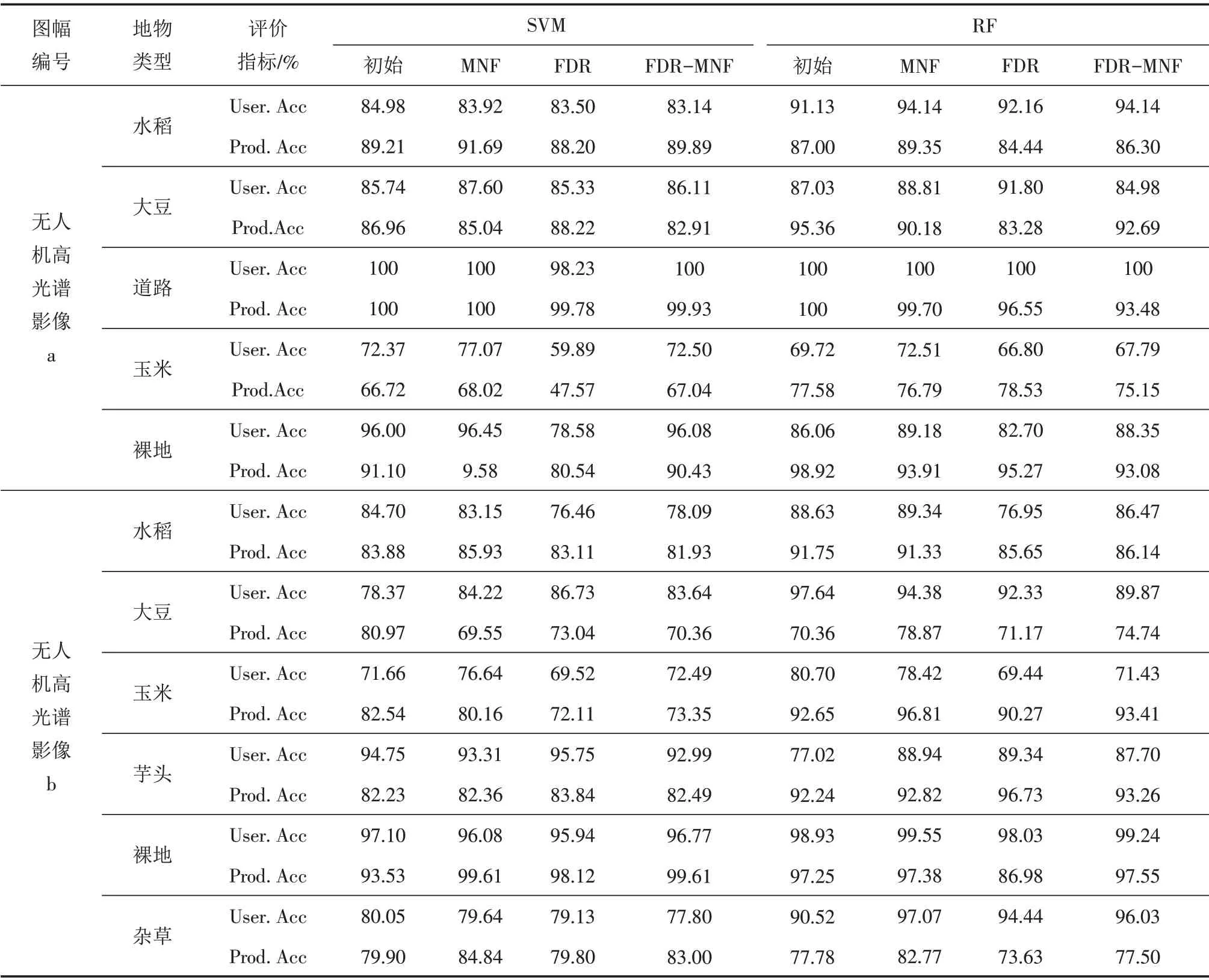
表3 各地物采用不同分类方法用户精度及生产者精度表Tab.3 User accuracy and producer accuracy with different classification methods
如图3所示,对于无人机高光谱影像b,使用SVM分类出现了将玉米误分为水稻的现象,采用RF后,这种现象得到很好的解决,且较好地将玉米和水稻进行区分. 对于无人机高光谱影像a,采用SVM方法分类时长势较差的大豆同样存在误分为水稻的现象,采用随机RF后,大豆的生产者精度以及用户精度都得到一定的提升. 由此可见,采用RF分类方法能有效对漆树湾地区的农作物提取和精细分类.
在研究区内所有地物类型分类结果中玉米植株的分类效果最差,无论是随机森林分类算法还是支持向量机分类算法所得结果精度都比较低,相比于其他地物类型的分类结果,玉米植株的分类往往出现更多错分漏分现象. 分析原因可能是由于研究区内玉米植株分布在不同地块,玉米植株的生长状况不同,无人机影像a内左上角地块玉米植株生长旺盛,右下角玉米植株即将停止生长正处于即将枯萎时期;处于不同生长期的玉米植株波谱曲线具有一定差异,出现同物异谱现象,处于生长旺盛时期的玉米植株波谱曲线和水稻大豆波谱曲线更为相似,于是导致几种农作物错分现象;除此之外,阴影的存在对研究区内玉米植株的分类有较大影响.
在研究区内,大豆正处于生长旺盛期,大豆植株在近红外波段处具有最高反射率,且生长状况均匀,有利于影像的精细分类. 在分类结果中发现在采用支持向量机分类时往往会出现在大豆植株间隙中有少量水稻现象. 通过对比初始影像以及无人机多光谱影像可知,在大豆种植间隙中往往出现一定混合像元且植株间隙边缘大豆长势较差,于是造成分类结果的不准确.
此外,研究区内有较大面积的水稻植株,研究区时水稻植株正属于灌浆-乳熟期,是水稻产量形成的重要时期,研究区内水稻生长状况较为均匀,水稻植株间的波谱信息较为相似,水稻识别分类效果较好. 影像b内的芋头植株的识别情况较为正常稳定,本研究对漆树湾地区的芋头进行了有效提取.
采用无人机高光谱影像对研究区主要农作物进行精细分类,且分类结果精度较高,实现了对研究区内主要农作物进行提取,为后续研究区内农作物产量估计、农作物生长状况监测、农作物病虫害监测等提供了有力的依据和途径.
3 结论与讨论
本文基于无人机高光谱遥感对研究区主要农作物类型进行提取和监测,利用无人机高光谱影像采集主要农作物的信息并建立判别模型对研究区无人机高光谱影像种主要农作物类型进行提取和分类. 通过本文的研究实验分析,对研究区主要地物类型获取光谱曲线,并对研究区内无人机高光谱影像进行MNF降维变换、FD变换等特征变换;并在此基础上分别采用SVM以及RF分类算法对数据处理过后影像进行分类,对研究区内主要农作物进行监测和提取,研究表明:
1)对初始影像以及一阶导数(FD)影像分别进行最小噪声降维变换(MNF)后,前十个分量所包含的信息量分别在91%以及73%左右. 求取研究区内主要农作物一阶导数光谱曲线,发现一阶导数光谱曲线突出了大豆植株的光谱信息,但未提高其他农作物间的可分性.
2)采用SVM与RF对研究区高光谱影像中农作物进行精细分类,研究表明两个分类方法都取得较高的监测精度,其中RF分类方法对无人机高光谱影像具有更优的分类效果,且在对主要农作物,如大豆玉米等植株的识别具有更高的监测精度.
3)选取降维变换后的初始与一阶导数影像的前十个主成分分别利用SVM与RF进行分类,降维变换后影像分类结果精度比用全波段影像分类结果精度高1%~5%. 影像分类精度有所提高,并且可以有效地提高判别模型的分类速度,大大减少了数据量.
无人机高光谱对农作物大的分类应用研究具有巨大潜力,是未来研究发展的方向.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
车主之友(2022年4期)2022-08-27
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
空间科学学报(2021年1期)2021-05-22
海峡姐妹(2019年12期)2020-01-14
数学大世界·中旬刊(2017年3期)2017-05-14
高中生学习·高三版(2016年9期)2016-05-14
火控雷达技术(2016年1期)2016-02-06
新高考·高二数学(2014年7期)2014-09-18