
基于可见光通信的室内定位与定向系统
2021-01-19 04:58:32杨国伟黄兆标樊冰周雪芳毕美华
通信学报 2020年12期
杨国伟,黄兆标,樊冰,周雪芳,毕美华
(杭州电子科技大学通信工程学院,浙江 杭州 310018)
1 引言
随着大型室内建筑逐渐增多,对室内定位的需求快速增长,各类室内定位方案成为当前研究的热点。由于电磁屏蔽、多径衰落、障碍物阻挡等因素影响,全球定位系统(GPS,global position system)无法应用于室内定位。因此,基于Wi-Fi、蓝牙、射频识别(RFID,radio frequency identification)、超宽带等室内基站的无线定位方案逐渐发展起来,但是室内的电磁环境复杂且定位精度要求高,单类型无线定位方案无法兼顾定位精度、系统稳定性和运维成本,自身均有一定局限性[1-2]。另外,一种无线光通信——可见光通信(VLC,visible light communication),以其绿色、抗电磁干扰、频谱资源丰富等优势得到迅速发展,同时基于VLC 的高精度室内定位也得到了广泛研究。与其他无线通信方案相比,基于VLC 的室内定位不受电磁干扰,系统稳定,定位精度高[3-4]。同时,该VLC 定位系统可以和智慧照明系统融合铺设,大大降低了建设与运维成本。
基于VLC 的室内定位系统通常采用LED 作为光源。LED 具有合适的调制速率,能在照明的同时实现通信与定位。在VLC 室内定位系统中,一般采用几何测量法和基于图像的算法来进行定位。几何测量法一般采用到达时间(ToA,time of arrival)[5]、到达角度(AoA,angle of arrival)[6]、到达角差(ADoA,angle difference of arrival)[7]、接收信号强度(RSS,received signal strength)[8-9]来进行测距。其中,ToA、TDoA 要求设备具有严格的同步时钟周期,AoA 易受信号范围限制。而基于图像的定位算法相对复杂,硬件成本和功耗较高,其应用受到一定限制[10-11]。
现有的大部分VLC 定位系统都存在一些缺陷需要克服。例如,在基于RSS 的定位系统中,为了简化定位模型,通常假设接收端保持竖直向上[8-9]或倾角已知[12]状态,接收端自身倾角未知或者变动将使VLC 的定位精度下降。采用惯性测量单元(IMU,inertial measurement unit)来测量接收端的倾角,则会增加终端的复杂性,也会引入IMU 抖动误差[13]。对于基于图像的算法的VLC 定位系统,有研究采用ADoA 补偿倾斜角,但要求的LED 布置密度较高,不适合实际照明场景[10]。ToA 不受接收端的倾角影响,但要求接收端与发射机之间有严格的时间同步,设备成本较高[5]。
为了消除上述RSS 定位系统中接收端倾角的影响,本文研究了一种基于RSS 的VLC 室内定位与定向系统,实现了接收端三维空间坐标和三维方向的探测,消除了传统三维定位系统中接收端方向对定位精度的影响。本文首先分析了融合接收端方向角的VLC 定位模型;然后提出了一种基于粒子群优化(PSO,particle swarm optimization)和天牛须搜索(BAS,beetle antennae search)的融合算法,同时实现了定位与定向的功能;最后搭建了0.9 m×0.9 m×1.5 m 空间内的实验系统,验证了所提定位与定向算法的有效性和整个系统的可行性。
2 基于RSS 的VLC 定位系统模型
2.1 系统模型
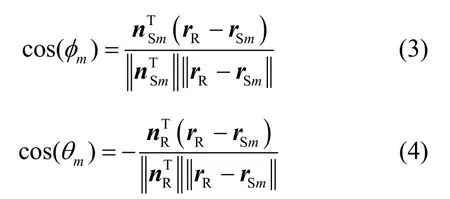
在VLC 定位系统模型中,采用LED 光源作为定位参考发射源,采用光电探测器(PD,photo detector)作为接收端。LED 发射带有ID(identity)信息的光信号,PD 感应光信号并将其转换为电流,处理器利用相应的RSS 模型来计算接收端的位置。图1 展示了VLC 定位系统模型。接收端的三维空间坐标表示为rR∈ℝ3×1,三维方向表示为nR∈ℝ3×1。相应地,LED 光源的三维空间坐标和三维方向表示为rSm∈ℝ3×1和nSm∈ℝ3×1,其中m=1,…,K,K为LED光源的数量;φm和θm分别为LED 光源的辐照角和接收端的入射角,h为发射端所在平面距地面的高度。
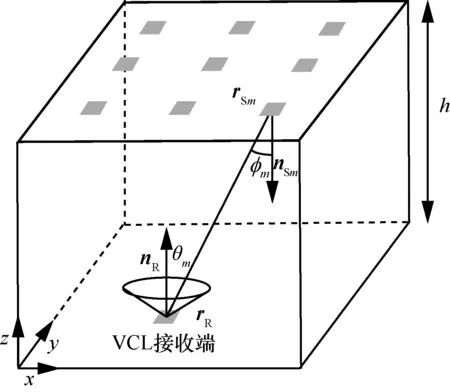
图1 VLC 室内定位系统模型
在VLC 定位系统中,多个LED 光源的光信号在时域上是重叠的。因此,要实现VLC 室内定位,首先要实现多址,可采用的方案有时分多址(TDMA,time division multiple access)[14]、频分多址(FDMA,frequency division multiple address)[15]、码分多址(CDMA,code division multiple access)[16]等技术。本文采用CDMA 技术,以Walsh 码作为扩频码,来区分不同ID 的LED 光源;采用开关键控(OOK,on-off keying)调制方式来调制每个LED光源的数据及其ID 信息。接收端通过解扩、解调、抽样判决等操作,可以获得LED 光源的ID 和RSS。
2.2 光源模型
由于LED 光源具有较大的光束角,其辐射模式可视为朗伯(Lambertian)辐射模型。假设LED光源与接收端之间的距离d远远大于PD 有效面积AR和光源面积AS,即d≫AR且d≫AS,则LED光源和接收端可以视为点。在直射链路(LoS,line of sight)下,LED 光源的信道增益[17-19]为

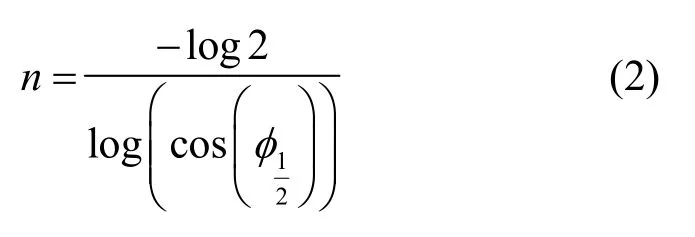
其中,AR为PD 的有效面积;为LED光源与接收端之间的距离;TS(θ)和g(θ)分别为滤波器增益和聚光器增益;n为朗伯光源阶数,与光源的指向性有关,可表示为
通过自由空间传输后,PD 接收的光功率Pm可以表示为
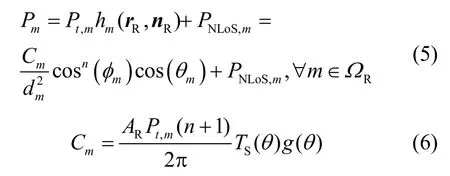
其中,Pt,m为LED 光源的发射光功率;Cm可视为常数,取决于LED 光源和探测器的物理属性;PNLoS,m为发射端NLoS 信道信号的功率;ΩR为可以被接收端检测到的LED 光源的集合,表示为

其中,θFoV为接收端的视场角(FoV,field of view)。
由于NLoS 信道信号强度远小于LoS 信号强度,因此本文仅考虑LoS 情况,这不会影响本文论证结果。接收端的噪声可分为散粒噪声()和热噪声,散粒噪声(thermal)来源于接收光功率引起的光电二极管波动,热噪声来源于电子的随机运动。接收端的噪声服从高斯噪声分布表示为

整个系统的信噪比(SNR,signal noise ratio)可表示为
3 VLC 定位与定向算法
由于VLC 三维定位与三维定向问题属于六元非线性方程组求解问题,直接通过数学解析的方式来计算接收端的位置和方向较为困难。因此,许多研究采用了PSO、模拟退火(SA,simulated annealing)算法等全局优化算法来搜索数值最优解[21-22]。假设为接收端的三维坐标和三维方向,并设定适应度函数,在六维空间中搜索坐标和方向,将使适应度函数最优的值作为六元线性方程组的解,即x的最优解可表述为

其中,f(x) 为本文设计的适应度函数,表示为
通过式(12)所示光源辐射模型得到理论RSS 与实际RSS 的差,将其平方和作为适应度函数。
本文将PSO 与BAS 算法相结合来寻找六元线性方程组的最优解,实现VLC 同时定位与定向。PSO 是成熟的仿生算法,在群体寻优方面有优异的表现。而BAS 在单体搜索中表现灵活,参数易调,具有较好的收敛速度和精度。本文采用PSO 在当前信息下搜索最佳的方向。在三维空间中生成Np个粒子,将粒子的三维坐标作为接收端的方向nR。粒子群根据更新策略向最优解的方向移动。在第t+1 次迭代时,粒子的位置更新为
其中,v为粒子速度,w为惯性权重,c1和c2为加速常数。上标pBest 和gBest 分别表示粒子的个体极值和粒子群体极值。对于已确定方向的粒子,采用BAS 算法来搜索在当前方向nR下粒子最优的三维坐标rR。
BAS 算法是基于天牛觅食原理的元启发式优化算法[23],其仿生原理是,天牛通过其2 条须所接收的气味强度差异来觅食。如果左须接收的气味强度大于右须接收的气味强度,则天牛下一步向左移动,否则向右移动。基于这个原理,天牛可以有效地找到食物。在BAS 中,食物的具体位置为目标极值点,食物气味强度为适应度函数,天牛根据气味逐步逼近的方式来获得最优解。BAS 的数学模拟如下。天牛可在三维空间中任意方向移动,用随机单位向量来描述。则天牛左须和右须的坐标可以表示为


其中,下标r、l 分别表示右侧和左侧,上标t表示第t次迭代,c为常数,δ为天牛的步长,η为步长衰减系数。天牛在t时刻的坐标表示为

其中,sign(·)为符号函数。重复更新天牛左右须的位置并探测气味强度,向气味强的方向移动即可获得每个粒子在当前nR下的最优解,再根据式(13)和式(14)更新粒子的方向nR。最后由天牛去搜索最佳的坐标,重复操作直到达到目标条件。
本文所提VLC 定位与定向算法如算法1 所示。
算法1VLC 定位与定向算法

4 系统仿真与分析
4.1 系统仿真设计
为验证本文系统的可行性和性能,本节首先进行了仿真测试。在仿真中,设置了3 m×3 m×5 m 的室内空间,并设9 盏LED 光源安装在天花板上,如图1 所示。9 盏LED 光源的空间坐标分别是A(0,0,5),B(1.5,0,5),C(3,0,5),D(1.5,1.5,5),E(1.5,1.5,5),F(3,1.5,5),G(0,3,5),H(1.5,3,5)和I(3,3,5)。每个LED 光源发送一个基于CDMA 调制的唯一ID 信息,并被接收端接收。
本文系统的其他仿真参数如下:LED 光源功率为10 W;滤波器增益、聚光器增益均为1;探测器的有效面积为1 cm2;朗伯阶数为1.5。本文通过2个方面来衡量系统性能:系统的定位误差、系统的定向误差
4.2 仿真结果
图2 给出了VLC 定位与定向算法收敛过程。接收端位于(1.5,1.5,1) 处,方向向量为(0.5,0.5,0.707),信噪比为40 dB。图2 中每一个粒子的位置表示在该方向的最佳坐标,线段指向为该粒子的方向。随着迭代次数的增加,粒子逐渐向目标点处靠拢,线段指向也逐渐平行于参考方向。
图3 展示了在距地面高度为1 cm 的平面内、信噪比为30 dB 条件下的定位测试结果。平面上共生成了11×11个测试点,每2个测试点间距为0.3 m。在保证测试点处于每盏LED 光源FoV 的条件下,随机生成各个测试点的方向。结果显示,系统平均定位误差为15.25 cm,平均定向误差为7.17°。误差主要因为噪声的干扰,使测得的RSS 与理论RSS有较大的偏差,从而影响粒子的搜索过程。

图2 VLC 定位与定向算法收敛过程
图4 给出了在不同信噪比下系统的定位与定向仿真结果,其纵坐标分别为定位误差和定向误差累积分布函数(CDF,cumulative distribution function)值。每次仿真生成400 个测试点进行误差统计。当信噪比为20 dB 时,系统平均定位和定向误差分别为36.11 cm 和15.77°;当信噪比为30 dB 时,系统平均定位误差和定向误差分别为14.58 cm 和6.79°;当系统的信噪比提升至40 dB 时,系统平均定位和定向误差降低至4.82 cm 和2.24°。从定位与定向的仿真分析可知,信噪比对系统的定位性能有较大的影响。

图3 定位测试结果
仿真计算的处理器为AMD R5 3600,主频为4.1 GHz。仿真中用到的参数如表1 所示。在VLC 定位与定向算法实验中,由于搜索维度较大,平均时间开销为1.06 s。
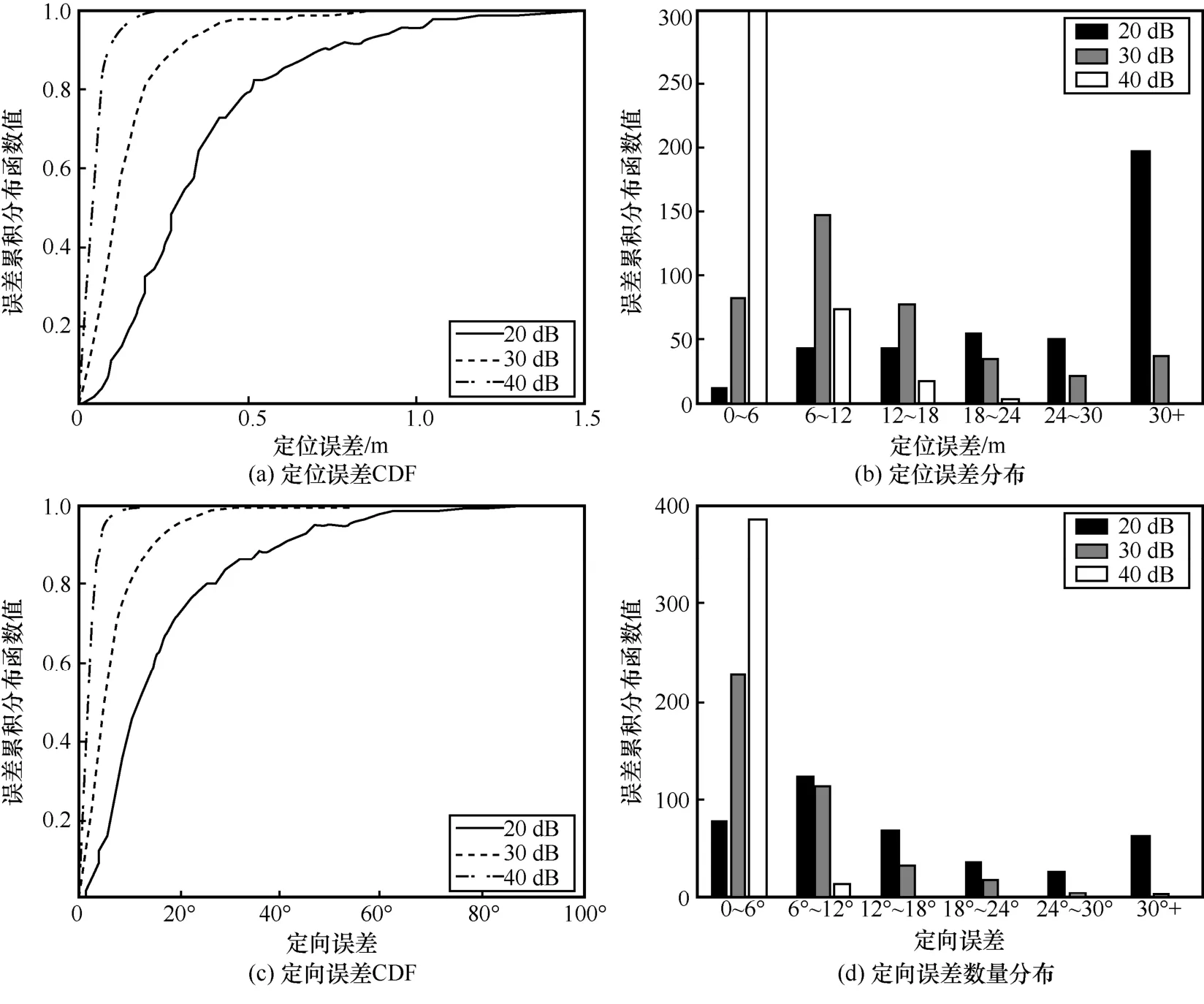
图4 不同信噪比下定位与定向仿真结果
5 实验测试与分析
5.1 实验设计
本文VLC 室内定位与定向系统的功能框架如图5 所示。在发射端,采用Walsh 码作为扩频码,对每个LED 光源的ID 信息进行扩频处理,并将扩频后的信息存储到乐鑫ESP32 中,由ESP32 驱动电路来控制LED 光源的开关状态。接收端通过PD将光信号转换为电信号,再由接收端对采集到的数据进行相应处理。
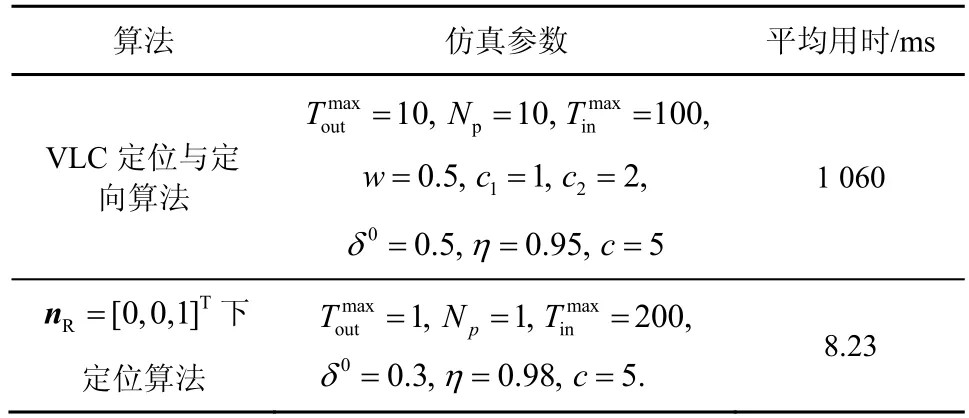
表1 仿真参数设置
实验测试平台空间大小为0.9 m×0.9 m×1.5 m。9 盏LED 光源固定在高度为1.5 m 的铝架上,由ESP32 周期性地发射带有ID 信息的光信号,相邻LED 光源之间的距离为0.45 m。实验采用的LED光源的光束角为100°,朗伯阶数为1.5。
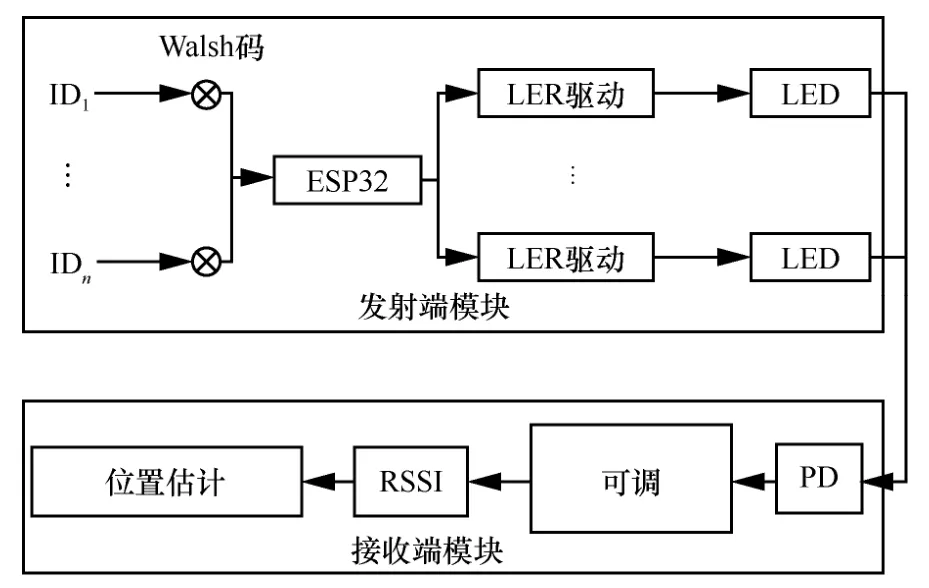
图5 VLC 室内定位与定向系统功能框架
5.2 朗伯模型优化算法
由大量实验测试可知,定位误差产生的原因如下。1) 光源实际辐射模型与理论辐射模型有较大的差异。2) RSS 测量误差,环境光、电路噪声对混合信号解调有一定的影响。这2 种因素导致实际RSS 与理想RSS 之间存在较大偏差,严重影响系统的定位与定向性能。总体而言,辐射模型差异带来更大的定位误差影响,本文提出一种基于朗伯模型优化的补偿算法。
光源辐射模型(式(12))中主要参数为Cm。通常情况下,可在LED 光源FoV 内采集一个点的强度信息,通过式(12)来计算Cm。在获得Cm后可计算第m号LED 光源在目标点的理论RSS 值。然而,在实验过程中发现实际LED 光源在不同区域的Cm并不一致。举例说明,图6 中Q0点测得的Cm并不能很好地描绘光源在Q3点附近区域的光强变化关系。由于Cm的偏差会严重影响定位精度,本文采用一种基于朗伯模型优化的算法来进一步优化定位结果。首先将式(5)改写为

其中,Cm,r为第m号光源在r处的Cm。其次,在定位区域中采取部分点作为指纹点。再次,在每个指纹点的信息中分离出所有LED 光源的RSS,并由此得到该指纹点处所有LED 光源的朗伯模型初始参数的集合Cr,表示为


图6 LED 光源在不同位置的辐射
最后,在定位阶段选取天牛离当前坐标最近的k个指纹点,将这k个指纹点的加权平均值作为该坐标的Cr。加权算式为

5.3 实验结果及分析
在进行VLC 定位与定向实验时,发射端采用9 盏LED 光源,分别在高度为0 和0.2 m 的测试平面进行实验,每个平面分别以30°的倾角设置25 个点作为参考点,并采集9 个指纹点用于朗伯模型优化算法。定位与定向结果如图7 所示,优化前,2 个平面内50 个测试点的平均定位误差为10.47 cm,定向误差为12.61°。优化后,平均定位与定向误差降低至5.32 cm 和5.99°,可以提高约50%的精度。
本文在方向向量为(0,0,1)情况下做三维定位实验。实验中采用A、C、G、I 这4 盏LED 光源,并保持接收端竖直向上,在高度为0 的测试平面上,采集25 个测试点,并采集5 个指纹点用于优化算法。表2 对比了本文算法与文献[8,23]算法的三维定位精度。在相同迭代次数下进行比较,实验结果表明本文优化算法有更高的定位精度。
图8 展示了本文算法实验定位结果。在优化前,系统的定位误差为3.84 cm,经优化后平均定位误差减小至1.55 cm。
从图7 和图8 可得,本文提出的VLC 室内定位与定向系统具有较高的精度,可提供厘米级的三维定位服务。
6 结束语
本文设计了一种基于VLC 的三维定位与定向系统,采用CDMA 编码ID 来解决码间干扰问题,并提出了一种结合PSO 与BAS 的同时定位与定向算法。相比于传统VLC 室内定位系统,所提定位算法精度不受接收端方向变动影响,并提供接收端的三维位置和三维方向,具有更广泛的适用性。仿真分析结果表明,所提VLC 定位与定向系统在40 dB 下可实现4.82 cm 的定位精度和2.24°的定向精度。在实验系统中,引入一种补偿实际系统误差来提高定位精度的优化算法,通过采集适当指纹点信息来估计光源辐射模型的参数,再由所估计的辐射模型计算出精确坐标。在0.9 m×0.9 m×1.5 m 的空间中,测试结果表明优化后的实验系统能够将平均定位和定向误差降低至5.32 cm 和5.99°,特别是接收端保持竖直向上时可实现1.55 cm 平均定位误差。本文提出的VLC 室内定位与定向系统具有较高的定位精度,使VLC 系统具有较好的应用前景。

图7 三维定位与定向结果
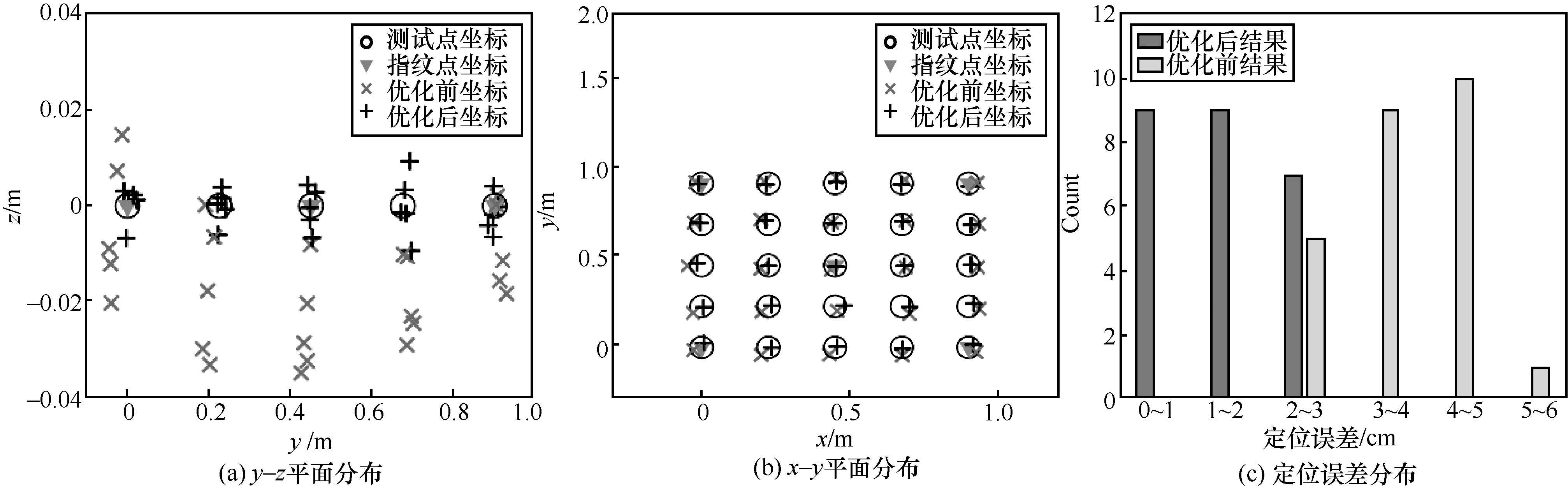
图8 三维定位分布

表2 定位性能比较
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:22
小哥白尼(野生动物)(2021年1期)2021-07-16 08:02:52
石家庄铁路职业技术学院学报(2021年1期)2021-06-09 06:06:38
新能源科技(2021年6期)2021-04-02 22:43:34
科学技术创新(2021年7期)2021-03-23 06:37:42
光源与照明(2019年3期)2019-06-15 09:21:04
小学生必读(低年级版)(2018年10期)2019-01-04 10:30:56
故事作文·低年级(2018年10期)2018-10-25 20:56:52
数学小灵通·3-4年级(2017年3期)2017-04-16 04:41:11
作文与考试·小学低年级版(2015年11期)2015-07-17 01:02:16
