
证明时空Rn的最大维度是4
2021-01-16 07:28:34李玉发李宇航
探索科学(学术版) 2020年2期
李玉发 李宇航
1.广东省惠州市第一中学 广东 惠州 516001;2.澳大利亚国立大学硕士研究生精算专业2019届
(1)易点宇航法则:J4n+k=ik(n,k∈N,k≤3)
(2)航易方程:1+J24n+m=0,J4n=1,J4n+m=Jm,n∈N,m∈N+,m≤3
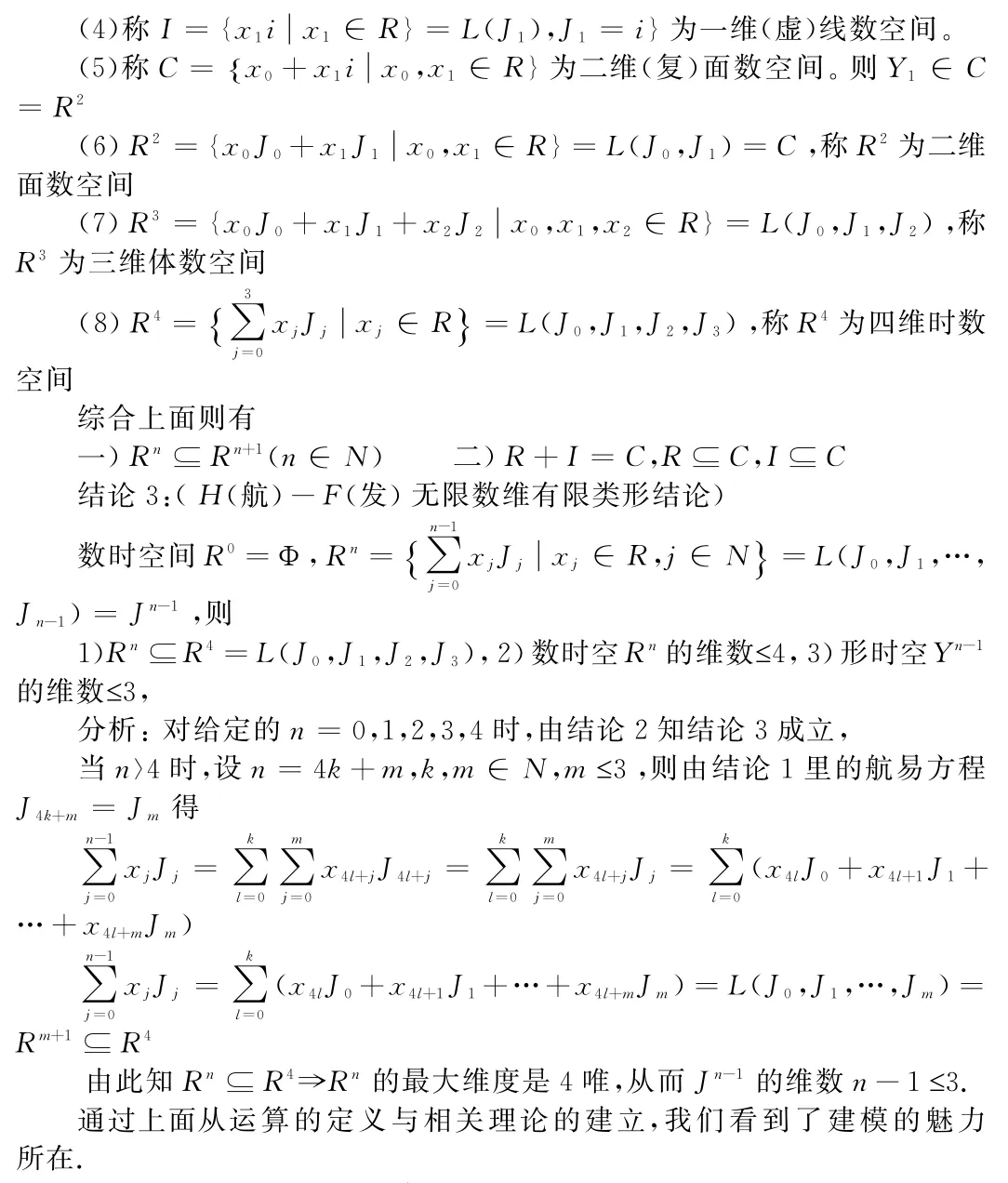
(3)H(航)-F(发)无限数维有限类形结论:
①Rn⊆R4,②Rn的最大维度是4唯,③Jn的最大维度是3唯
一、基本原理[1]
定义1n维的时点Pn=(x0,x1,···,xn-1)(n∈N+,xk∈R,k∈N),P0=(x0)=x0
定义2 零点On:O0=Φ,O1=(0)O2=(0,0),O3=(0,O2),…,On=(0,On-1).
定义3 数光点Tn:T1=(1),T2=(0,1),T3=(0,0,1),…,Tn=(On-1,1).
形光点Jn:J0=(1),J1=(0,1),J2=(0,0,1),…,Jn-1=(On-1,1).
有结论:Tn+1=Jn(n∈N)
定义4 升维:(n,k∈N,xk∈R,)
1)x0=(x0)=(x0,0)=(x0,02)=(x0,0k).
2)(x0,x1)=(x0,x1,0)=(x0,x1,02)=(x0,x1,0n).
3)(x0,x1,···,xn)=(x0,x1,···,xn,0)=(x0,x1,···,xn,0k).
定义5 关于形时空间Jn与数时空间Tn,有
当n=4m+j,m∈N,j=0(1,2,3),Jn是m级的点(线,面,体)形时空.
二、具体应用
定义6 易点列Tn:T0=On,T1=(1),T2=(0,1)=(0,T1),T3=(0,0,1)=(0,T2),
——,Tn+1=(On,1)=(0,Tn)。(n∈N∗)(↔ 表示一一映射)则有
1)一维实点T1=(1)=(1,On)↔1,实数J0=i0=1↔T1。
2)二维复点 (x,y)↔x+yi,x,y∈R,i2=-1,i-1=-i
T2=(0,1)↔0+i=i,复数J1=i1=i↔T2。
T3=(0,T2)↔(0,J1)=0+J1i=ii=i2=J2=-1,复数J2=i2=-1↔T3。
T4=(0,T3)↔(0,J2)=0+J2i=i3=J3=-i,复数J3=i3=-i↔T4。
T5=(0,T4)↔(0,J3)=0+iJ3=ii3=i4=J4=-1,复数J4=i4=1↔T5。
定义7 易点列Tn:T0=On,T1=(1),T2=(0,1),T3=(0,0,1),
——,Tn+1=(On,1)=(0,Tn)。(n∈N∗)(↔表示一一映射)
则有(易点的虚---实法则):
1)实数1↔T1=(1),实数1=J0=i0=T1。
2)虚数i=J1↔(0,1)=T2,虚数i=J1,i2=-1,i-1=-i。


定义8 (发易FT法则):
(1)易点列Tn:Tn=(0n-1,1)(n∈N∗),(↔ 表示一一映射)则。
易点列T1=(1)↔1=i0,T2=(0,1)↔i,T3=(0,0,1)↔i2,
——,Tn=(0n-1,1)↔in-1
(2)发点列Fn=(in-1)=in-1T1(n∈N∗),则Fn+1=iFn。则Fn=Tn(n∈N+)

结论1[2]:
(1)易点宇航法则 :J4n+k=ik(n,k∈N,k≤3)
(0n,1)↔Jn,n∈N,虚数i满足:i↔(0,1),i2=-1
J0=i0=1↔(1)=T1,J0称是点量,
J1=i1↔(i)=iT1=T2,J1称是线量,
J2=i2↔(i2)=i2T1=T3,J2称是面量,
J3=i3↔(i3)=i3T1=T4,J3称是体量,
Jn+1=iJn=iin=in+1↔(0n,i)=i(0n,1)=iTn+1=in+1T1,称Jn是易量,综合上面易点的宇航法则:J4n+k=ik↔Tk+1=ikT1(n∈N,k∈N+)
(2)航易方程:1+J24n+m=0,J4n=1,J4n+m=Jm,n∈N,m∈N+,m≤3
(3)宇航易点方程(n∈N+,m∈N)
易点有五大类:T0=On=Φ(0维的原点),T4n+1=T1(一维线点)T4n+2=T2(二维面点) ,T4n+3=T3(三维体点),T4n+4=T4(四维时点)。
T4n+m=Tm,T4+0=T0⇒结论:4维的时点=0维的原点
定义9 (n,m∈N)(m∈N,m≤3)
(1)易量有五大类
J4n=J0=i0=1(0维的点)↔T1,J4n+1=J1=i(1维的线)↔T2,
J4n+2=J2=i2=-1(2维的面)↔T3,J4n+3=J3=i3=-i(3维的体)↔T4。
J4n+4=J4=i4=1(4维的时间)↔T5
Jm=im(m维的易量)↔Tm+1
(2)易量的运算法则:

(3)J4n+m=Jm,J4+0=J0⇒结论:4维的时间=0维的点元
(4)易量与易点的转换法则:(↔表示一一映射)

定义10 [Rn升降维法则---F(发)升维法则]
称P0=Φ为0维(极)空间,称Pn为0维(点)空间
2)R=(R,0)⊆R2,称R为1维(线)空间
3)R2=(R2,0)⊆R3,称R2为2维(面)空间
4)R3=(R3,0)⊆R4,称R3为3维(体)空间
5)R4=(R4,0)⊆R5,称R4为4维(时)空间
6)Rn=(Rn,0m)⊆Rn+m(n,m∈N)
定义11 向量空间维数的定义
在线性点空间V中,如果存在n个点A1,A2,···An,满足:
(i)A1,A2,···An线性无关;
(ii)V中任一元素A总可由A1,A2,···An,线性表示.
那么,A1,A2,···An,就称为线性空间V的一个基,n称为线性空间V的维数.
维数为n的线性空间称为n维线性空间,记作Vn,.

称为n维线性空间Vn由基底A1,A2,···An所生成。

猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:44
中学生数理化(高中版.高考数学)(2021年11期)2021-12-21 05:34:28
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20 07:18:48
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20 07:18:46
数学物理学报(2020年3期)2020-07-27 01:19:56
新世纪智能(数学备考)(2020年12期)2020-03-29 02:15:34
数学物理学报(2016年5期)2016-08-24 07:38:40
数学物理学报(2016年6期)2016-04-16 04:40:58
小主人报(2015年4期)2015-09-14 02:50:29
小主人报(2015年2期)2015-03-01 12:30:54
