基于数字测量电路超声电机摩擦材料湿度测试系统
2021-01-14 00:45林惠玲
现代信息科技 2021年12期


摘 要:超声电机的摩擦材料性能对超声电机性能影响非常大,而摩擦材料的湿度则是影响其性能的因素之一。为了更好地研究不同湿度摩擦材料对电机的影响,根据吸湿后的摩擦材料会发生电容变化而导致电压变化的原理,利用数字测量芯片CAV444,根据超声电机摩擦材料不同湿度环境下的参数,完成外围电路设计;利用NI公司的數据采集卡,结合Labview软件,设计了一套摩擦材料湿度测试系统,并通过实验验证测试电路的可行性。
关键词:超声电机;摩擦材料;测试系统;数字电路;湿度
中图分类号:TP331.2 文献标识码:A 文章编号:2096-4706(2021)12-0047-04
Abstract: The performance of friction material of ultrasonic motor has a great influence on the performance of ultrasonic motor, and the humidity of friction material is one of the factors affecting its performance. In order to better study the influence of friction materials with different humidity on the motor, according to the principle that the capacitance of friction materials after moisture absorption will change and lead to voltage change, the peripheral circuit design is completed by using the digital measurement chip CAV444 according to the parameters of friction materials of ultrasonic motor under different humidity environment. Using the data acquisition card of NI company and Labview software, a set of friction material humidity test system is designed, and the feasibility of the test circuit is verified by experiments.
Keywords: ultrasonic motor; friction material; test system; digital circuit; humidity
0 引 言
超声电机是一种新型微电机,其原理是通过逆压电效应产生行波,由定子与转子之间的摩擦驱动电机[1],与传统电机相比较,其具有高精度位置和速度控制、惯性小、响应快、低速大转矩等优点,在航空航天、机器人、精密仪器中应用广泛[2-6]。摩擦副材料是超声电机的核心部件之一,摩擦材料的性能直接影响超声波电机能量传递的效率,国内外研究者对超声电机摩擦材料的进行了许多研究,如玻璃纤维粉可以改善摩擦材料的超声电机性能和耐磨性[7],宽温域低损耗压电摩擦材料可以改善超声电机的输出性能并增强环境适应性[8]、表面织构的分布对界面摩擦特性的影响[9]等。
超声波电机的最大的特点就是响应快,其响应速度一般是毫秒级的,然而在实践工作中,超声波电机在湿度较大时启动很慢甚至无法启动,需要变频才能启动,其不能快速启动的原因与摩擦材料吸湿性有一定的关系,而目前还没有对不同湿度摩擦材料对超声电机启动特性影响的研究。为了后期更好地研究电机启动特性与摩擦材料湿度的关系,检测超声波电机在何种湿度范围内能正常启动,得出电机能正常启动的湿度范围十分关键。本研究开发了一种湿度测试系统,该系统基于CAV444数字电路,使用Labview作为虚拟仪器的开发的平台,该平台具有开发周期短、编程灵活、易于实现测试信号的采集。
1 湿度测量原理
超声波电机定子与转子接触面粘贴有摩擦材料,由于摩擦材料具有吸湿性,因此电机在湿度较大环境时,电机摩擦材料吸水后的电容会随着改变。基于这一现象,将不同湿度摩擦材料的电容经过频率/电压转换、低通滤波器和放大电路转换输出电压。本测量系统利用CAV444电容电压线性转换数字电路,分别检测超声波电机在湿度为40%时与湿度为100%时定子与转子之间高分子材料的电压值,得出二者之间电压差值,再将此电压差值均匀等分,即可得出电机摩擦材料在不同湿度时对应的电压值,然后将湿度40%时的电压作为基础电压,通过基础电压与测量电压差值进行转换从而得到摩擦材料的湿度值。
2 测试系统硬件组成
本次测试系统的硬件部分由TRUM-60超声波电机、NI-9234数据采集卡以及CAV444电容电压线性转换数字电路和计算机组成。
2.1 TRUM-60超声波电机
TRUM-60超声波电机由定子、转子、壳体、底座,压电陶瓷、摩擦衬套、碟簧、轴以及轴承等组成。其中压电陶瓷与定子粘结在一起,在转子与定子接触面上黏结了一层摩擦材料,摩擦材料与转子黏结为一体,定子与转子间通过施加一定的轴向预压力使二者保持接触。
2.2 数据采集卡
NI-9234数据采集卡是一款4通道C系列动态信号采集模块,能针对配备NI CompactDAQ系统的集成电路压电式与非集成电路压电式传感器,进行高精度测量。
2.3 CAV444数字电路
CAV444的工作过程是通过对测量电容(内置的测量振荡器的电容器)充放电产生振荡周期,该振荡周期与测量电容的大小成线性关系,再通过频率/电压转换电路和低通滤波器,最后输出一个直流电压信号,经过一个零点和满度可调的输出级得出所希望的电压信号输出值,输出的电压与参考电压VREF之间为差分电压输出。图1是零点和满度输出电压可调的电路。
电路中各参数的计算:本次实验中的超声电机摩擦材料在湿度为40%时的电容CM,min=0.25 nF,湿度为100%时CM,max=1.25 nF,希望在测量电容最小时,相对VREF=2.5 V的输出电压VDIFF(min)=0 V以及在测量电容最大时的输出电压VDIFF(max)=1 V。
(1)测量振荡器电阻RCM=== 250 kΩ(其中VM=2.5 V,Icm=5 μA)。
(2)频率电压转换器电流调准电阻RCW== =500 kΩ(VIR=2.5 V,ICR=5 μA)。
(3)f/u频率电压转换器电容CW=CM,max/1.6=0.781 25 nF。
(4)工作电阻RA=1 200/5=240 kΩ。
(5)测量振荡器最小频率fM,min== =1.9 kHz;测量振荡器最大频率fM,max= ==9.52 kHz。
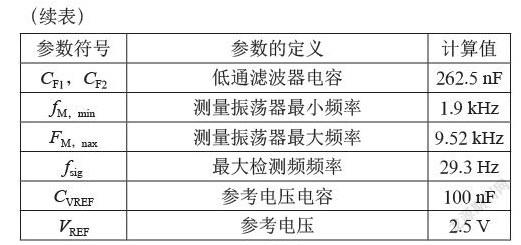
(6)低通滤波器电容CF1,CF2==262.5 NF。
(7)最大检测频率fsig=fM,min/65=29.3 Hz。
(8)CAV444调试电路系统的外接电阻已确定,即R1= 33 kΩ,R2、R3、R4、R5为100 kΩ,CVREF=100 nF,故可以计算出当电容最小时DIFF(min)和电容最大时DIFF(max)的值:
根据已计算好的电路元件参数,焊接一块湿度检测电路板。
3 测试系统软件设计
根据测量原理,把摩擦材料在湿度为40%的电压作为基础电压值,再测量电机摩擦材料在任一湿度时的电压值,把得出的电压值减去基础电压值,即可得到二者电压差值,从而得出当前测量电机摩擦材料的湿电机度值。本次测试系统采用的是Labview软件,通过对前面板的设计和程序模拟仿真获得数据。
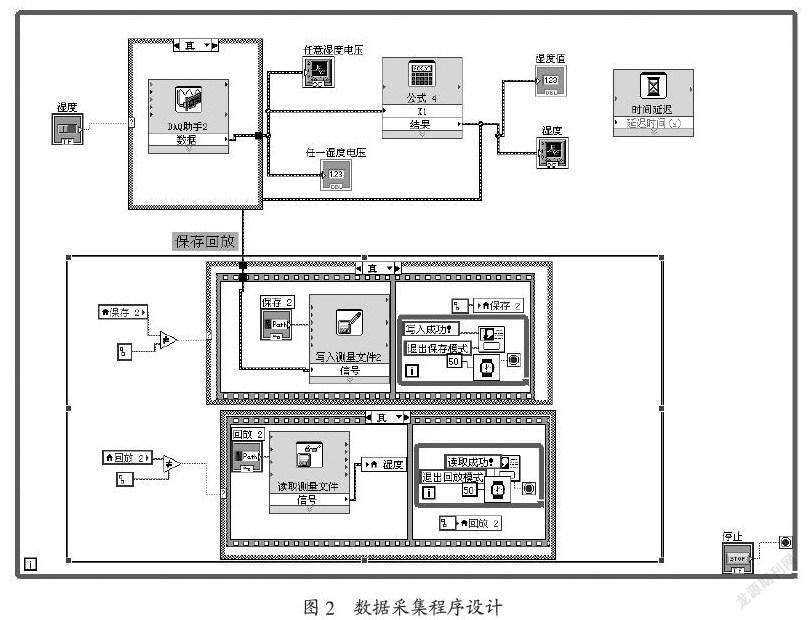
3.1 数据采集程序设计
根据湿度测量原理,第一步要得出电机在湿度为40%时以及湿度100%时的输出电压。首先利用CAV444电容电压线性转换电路检测电机在环境湿度为40%时摩擦材料的输出电压,再将转子泡水一段时间使得摩擦材料的湿度达到100%后,检测其输出电压。通过Labview软件编程,把电路的输出电压以波形图的形式表达。程序在运行前得对DAQ助手进行相应的设置,由于DAQ采集到的是电压信号,将输入电压最大和最小分别设为5 V和-5 V。经过多次实验,将程序运行后得到数据汇总如表2所示。
综合考虑,取电机摩擦材料在湿度40%的电压为3.622 V,在湿度100%时的电压值为3.616 V。(由于焊接时电路板元件参数选择没能完全与计算的参数一致,使得电路板检测到数据存在误差,但误差还是比较小的,因此整套检测方法是可行的。)
基于以上实验可以得出电压每变化0.001 V,电机摩擦材料的湿度也相应变化10%,由于电机正常所处的环境大约是40%左右。因此,在实验时,把电机摩擦材料在湿度为40%的电压当作基础电压值,通过获得某湿度时的电压值与基础电压的差值,就可以得出当前检测的电机摩擦材料的湿度值。考虑到程序采集时,我们需要控制采集时间,因此在程序设计时还应该设置一个停止采集按钮来控制采集时间。采集信号时,我们希望得到的不止是当前的数据,还应该保存每次试验的数据,方便以后研究对数据的读取,因此在程序设计的最后,应该编一个保存的程序。具体程序设计如图2所示。
3.2 测量系统前面板设计
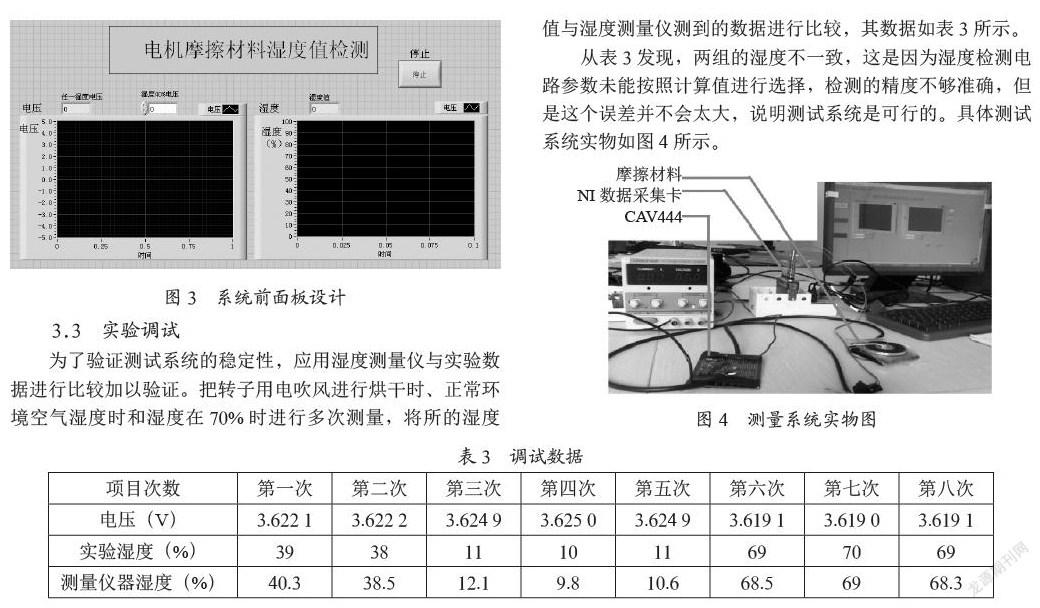
由程序设计结果可知电路输出的是电压值,而我们要看到的是电机摩擦材料的湿度值,因此在前面板应该放置两个波形图表以及显示相应的湿度以及电压值。同时为了控制采集时间,我们还要在面板上设置采集停止按钮,具体设计如图3所示。
3.3 实验调试
为了验证测试系统的稳定性,应用湿度测量仪与实验数据进行比较加以验证。把转子用电吹风进行烘干时、正常环境空气湿度时和湿度在70%时进行多次测量,将所的湿度值与湿度测量仪测到的数据进行比较,其数据如表3所示。
从表3发现,两组的湿度不一致,这是因为湿度检测电路参数未能按照计算值进行选择,检测的精度不够准确,但是这个误差并不会太大,说明测试系统是可行的。具体测试系统实物如图4所示。
4 結 论
通过利用Labview软件和CAV444数字电路系统组成的测试系统可以实现对摩擦材料的湿度检测,虽测量结果有一定的偏差,但误差在合理范围内,因此可得出本套测量装置是可实现湿度测试功能的。系统基于Labview软件开发,可以根据我们的需要进行编程,这对后面研究转子摩擦材料湿度对超声电机的机械特性和启动特性具有重要意义。
参考文献:
[1] 赵淳生.超声电机技术与应用 [M].北京:科学出版社,2007.
[2] 郑伟,王粲,余罗兼,等.用于嵌入系统的超声电机驱动设计 [J].组合机床与自动化加工技术,2020(2):128-131.
[3] 陈海鹏,陈超,王均山.强离心场下旋转型行波超声电机定子动力学分析与试验 [J].振动与冲击,2020,39(2):47-50+63.
[4] 李晓牛,赵淳生,姚志远.V形直线超声电机动力学建模与应用研究 [J].机械工程学报,2020,56(11):88.
[5] 龙涛元,张铁民,董义奎.宏微超声电机驱动系统辅助电源研制 [J].振动、测试与诊断,2019,39(5):987-991.
[6] 郑伟,周景亮,罗敏峰,等.超声电机检测竹片缺边装置设计与试验 [J].林业科学,2018,54(4):134-141.
[7] 曲建俊,闫瑾,宋宝玉.玻璃纤维粉对聚合物基超声电机摩擦材料性能的影响 [J].润滑与密封,2018,43(1):3-6.
[8] 梁瑞虹,赵盖,陈宁,等.超声电机宽温域低损耗压电与摩擦功能材料 [J].光学精密工程,2020,28(4):771-781.
[9] 刘晓亮,陈永彬,魏德宸.表面织构的分布对界面摩擦特性的影响 [J].滨州学院学报,2019,35(6):18-22.
作者简介:林惠玲(1987—)女,汉族,福建漳州人,讲师,本科,研究方向:机电一体化设计。
猜你喜欢
广东教学报·教育综合(2022年69期)2022-06-23
保健与生活(2021年1期)2021-02-04
华声文萃(2020年5期)2020-06-08
文萃报·周五版(2020年12期)2020-04-01
科学大观园(2019年11期)2019-09-10
计算机与网络(2019年17期)2019-09-10
计算机教育(2016年7期)2016-11-10
计算机教育(2016年7期)2016-11-10
科技视界(2016年17期)2016-07-15
科技创新导报(2016年5期)2016-05-14