
毛巾自动清洗拧干机的机械结构设计与有限元分析
2021-01-14 12:54杨金科杨金林
装备制造技术 2020年8期
杨金科,杨金林
(浙江理工大学机械与自动控制学院,杭州310018)
近年来,市场上出现了诸多种类的小型清洁装置,如壁挂式洗衣机。这种清洗装置体积较小,结构较为简单,功能也有所增加,在一定程度上方便了用户对小型衣物的清洗工作。但针对特定用户依然无法满足其需求,清洁度也无法得到保证。除此之外,这类清洗装置还存在其他缺点,如价格高昂、安装复杂、清洗时间过长、用水量大等,并且安装后难以进行移动,功能较为单一。于是本研究着眼于利用往复搓洗机构和挤压拧干机构来完成毛巾的清洗拧干工作研制了一种新型毛巾自动清洗拧干机,实现了实现毛巾的快速高效清洗、拧干。
1 毛巾自动清洗拧干机的结构设计
1.1 工作原理介绍
毛巾自动清洗拧干机由挤压拧干机构、 往复搓洗机构及其控制系统等组成,毛巾自动清洗拧干机整机结构如图1 所示,毛巾自动清洗拧干机功能原理展开如图2 所示,洗毛巾流程如图3 所示。将毛巾放入机器中,按下复位开关,通过32 单片机的控制,此时毛巾挤压机构工作,调整V 型槽角度,即增大搓洗板与毛巾之间的摩擦力;搓洗机构工作,直流减速电机带动偏心轮转动,进而曲柄连杆机构带动搓洗板往复运动,对毛巾进行搓洗;搓洗完成后挤压拧干机构在链条传动的连杆机构带动下进行对毛巾的挤压拧干,此时电流检测模块检测电机负载电流,从而控制挤压力度大小,防止电流过载对设备造成损坏,挤压完成后,手动取出,完成整个毛巾清洗工作。
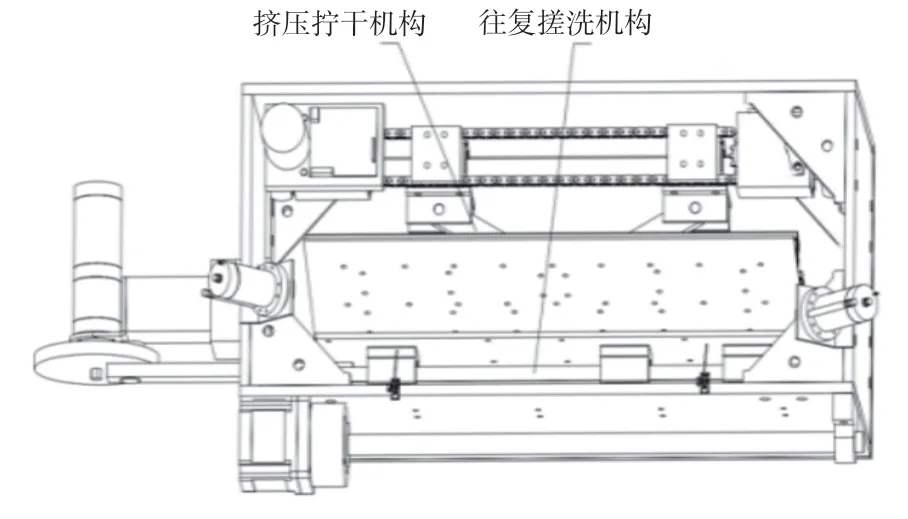
图1 整机结构图
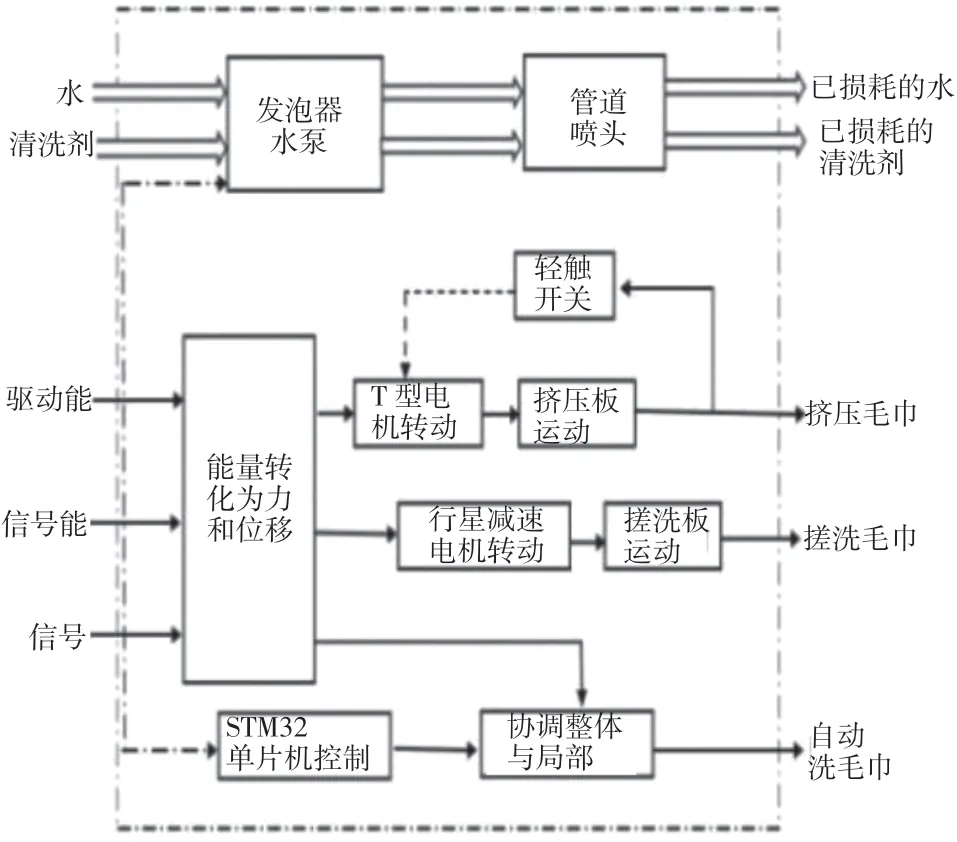
图2 功能原理展开图
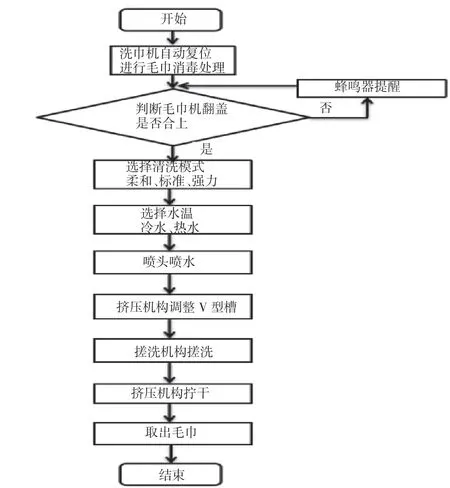
图3 毛巾清洗流程图
该毛巾自动清洗拧干机主要功能是帮助人们日常清洗毛巾并且在清洗结束之后拧干毛巾。
1.2 设计要求
毛巾自动清洗拧干机的主要任务是快捷高效的完成毛巾的清洗工作,且操作便捷,毛巾易于收取。该装置的设计指标如下表1 所列。
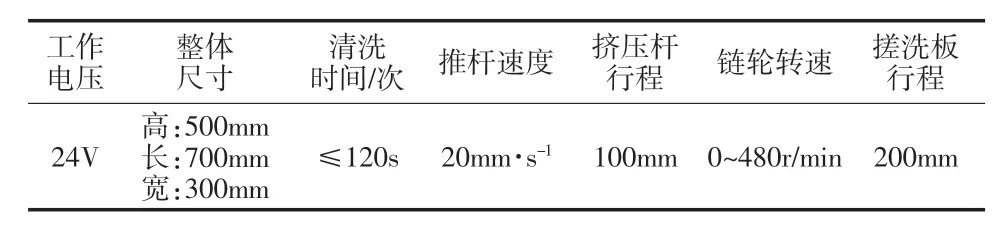
表1 预期参数表
2 挤压拧干机构
2.1 链轮与链条参数
挤压拧干机构主要实现将清洗结束之后的毛巾进行拧干。通过设计前的实验测得将毛巾挤压方式拧干需要大约1 600 N 的力,进行计算得两链轮之间传动比为1 即可。为此选择两个2 分17 齿,齿厚为3,节距为6.35 mm 的链轮,链轮材料为45#钢,经高频淬火。具体理论计算如下:
根据本项目设计方案,施力板若需达到1 600 N的力,主动轮转速为n1= 10 r/min,从动链轮的转速n2= 10 r/min。载荷平稳,两链轮中心距a ≈ 300 mm,传动近于水平布置,小链轮孔径dk= 8 mm。主动轮齿数Z1参数选取如表2 所示。
表2 按线速度v 选取小链轮齿数

表2 按线速度v 选取小链轮齿数
v/(m/s) 0.6~3 3~8 >8 Z1 15~17 19~21 23~25
由主动轮的转速n1可得线速度为0.18 m/s。因此选用单排04C17 齿的链轮较为合适。

其中Z2为主动轮齿数
链节数计算[4]:
根据链节数计算公式:

可得 LP=51。其中 Z1、Z2=17,为主、从动链轮齿数;a=322.5,为齿轮中心距[5];P=10.21 mm,为链节距。
链条传动速度:

链条的工作功率:
单侧有两个推杆由链条带动,链条传动功率P =Fcosθν*2 = 1.05 kW,θ 为推杆与链条挤压时的角度,经试验得 θ = 15°;F 为挤压力[6]。
设计功率P0= kAP,kA为工况系数。查链轮传动工作系数表得kA= 1,则P0= kAP = 1.05 kW
链条传递功率:
2.2 结构介绍
参照图4 和图5,L 型电机带动链条链轮运动,固定在链条上的两滑块沿着光轴做反向直线运动,滑块一端与连杆想接触,从而在T 型电机的带动下使两连杆间夹角发生改变,挤压板与外框架的底面之间采用合页连接,随着连杆之间夹角的变化,挤压板沿着扇叶旋转,从而达到挤压的效果。
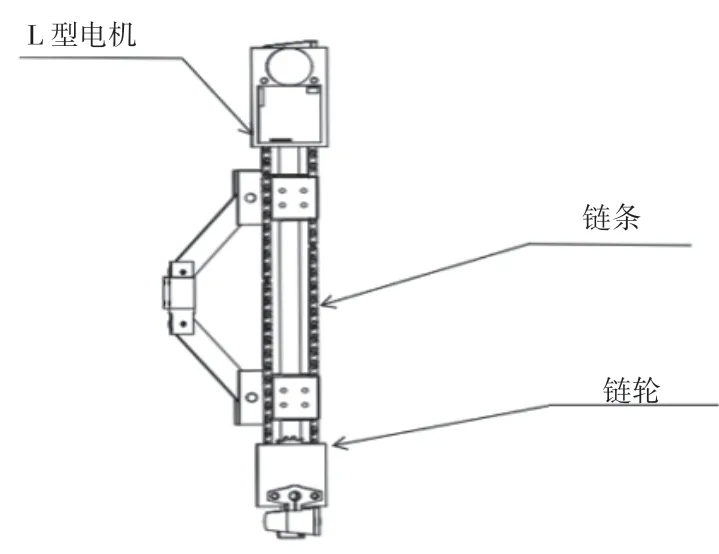
图4 挤压拧干机构部分示意图
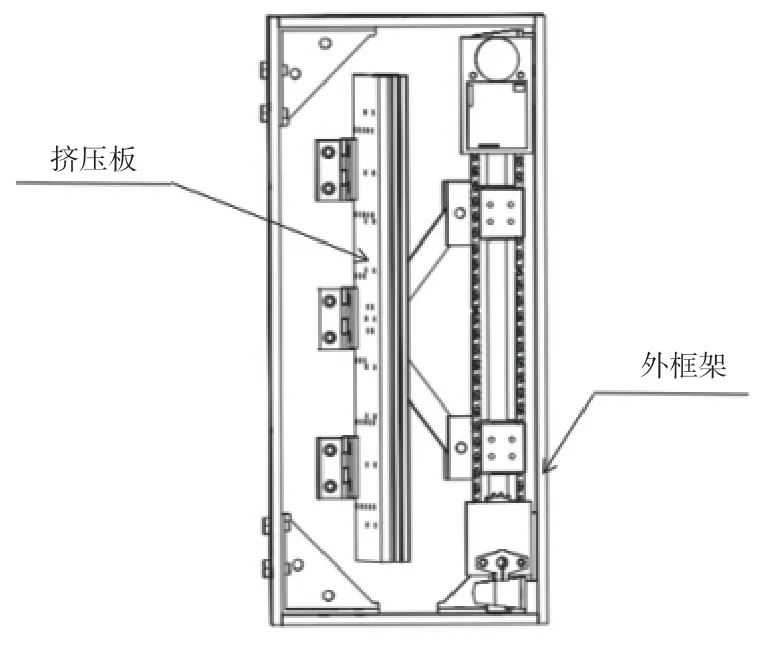
图5 为挤压拧干构装配图
2.3 有限元分析
毛巾自动清洗装置适用的毛巾尺寸范围为:250~ 1 200 mm,毛巾质量范围为 50 ~ 190 g[8]。挤压板、推杆这两个零件的是主要的受力部位,因此利用有限元分析法来计算这两个零件的变形和应力分布情况。
施力板有限元分析[9]:通过挤压来固定毛巾并达到搓洗的效果,杆通过链条带动对施力板施加压力,据实验得施力板将受到1 600 N 的力,可得推杆受最大压力 F = 1 600/sin(15°)= 6.18 kN[8]。图 6、图 7 是Soliworks 有限元分析图。
由图6、7 分析可得应力最大的部位位于挤压板四角为20.14 kPa,其屈服强度为195 MPa;最大形变量为2.44 × 10-6,在其弹性形变范围内,满足设计要求。
查表可知铝板和毛巾的摩擦系数为0.26[10],铝板以及毛巾的正压力为1 600 N,可计算出摩擦力f =F × u = 1600 × 0.26 = 416 N。
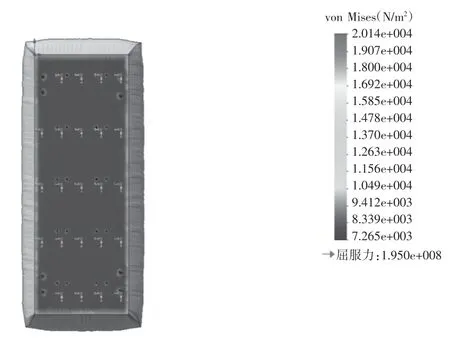
图6 挤压板最大应力情况分析
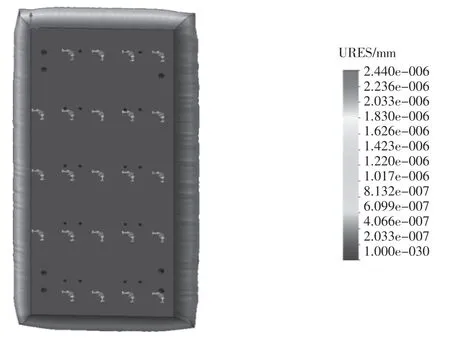
图7 挤压板最大应变情况分析
由图8、9 分析可得,推杆的最大应力为103 MPa,在孔的部位,其余部位大致在69 MPa 以下,推杆的屈服强度为195 MPa,推杆得受力在弹性变化范围内。推杆的最大形变为0.057 mm,主要在受力面附近,变化范围较小,均满足设计要求。

图8 推杆最大应力情况分析

图9 推杆最大应变情况分析
3 往复搓洗毛巾机构设计
参照图10 往复搓洗机构部分示意图,直流减速电机带动连杆机构,拖动受力板在水平方向内沿着导轨做往复运动受力板与导轨之间通过滑块连接,可在水平方向灵活运动。使用时,要借助挤压机构的配合,将湿的毛巾放入搓洗板和受力板之间,再通过直流减速电机驱动,利用两板对毛巾的摩擦力,实现搓洗功能。
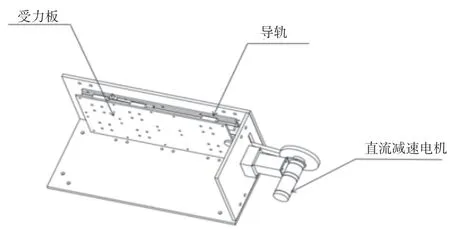
图10 往复搓洗机构部分示意图
4 毛巾自动清洗拧干机设计结果
4.1 毛巾自动清洗拧干机三维模型建立
根据以上结论使用Solidworks 建立娱乐机构模型并与整体机构进行安装,最后的整体三维模型渲染图如图11 所示。
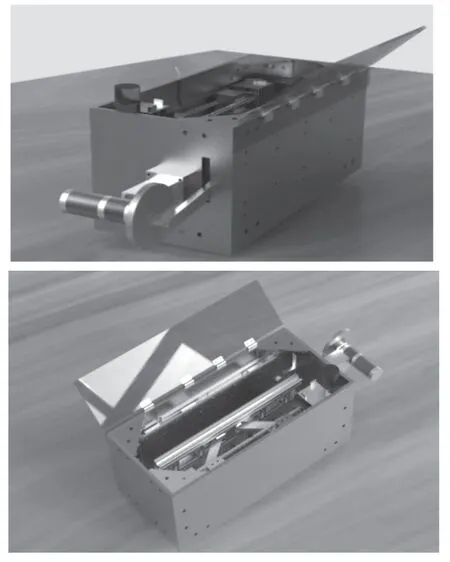
图11 整体三维模型渲染图
4.2 毛巾自动清洗拧干机实物样机
对结构优化后加工制作出的健身娱乐康复器械实物样机图如图12 所示。
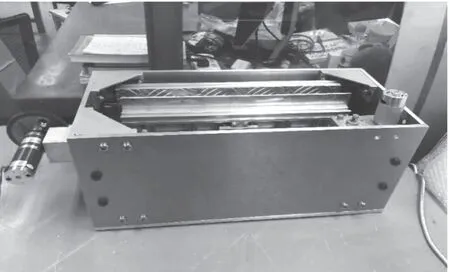
图12 毛巾自动清洗拧干机实物样机
5 实物验证
为了验证毛巾自动清洗拧干机实物样机的综合性能参数是否满足预估条件,对其机械性能与电气性能进行多次实验与数据测量并与项目初期的功能参数方案进行对照,发现毛巾自动清洗拧干机实物样机在外形尺寸、传动稳定性,单次清洗时间等方面均满足预期目标值。其中为测试其输出转速采用串口发送的方式于PC 端读取编码器捕获信号数值,并结合下述公式:
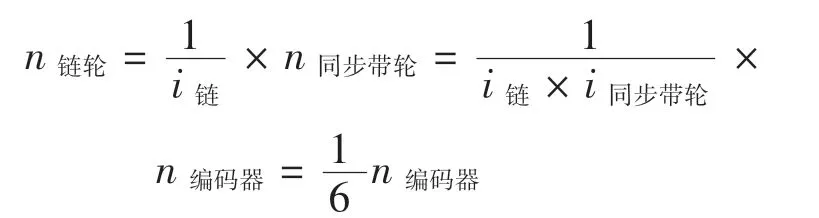
多次计算出链轮转动的速度,并与预期方案表进行对照。毛巾自动清洗拧干机实物样机的预期参数表于实验测得的数据表分别见表3 与表4。
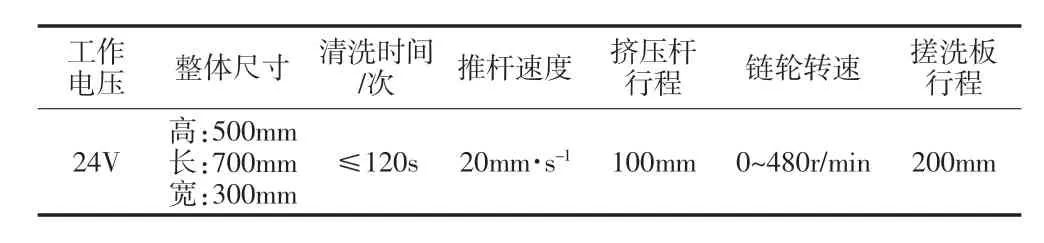
表3 预期参数表
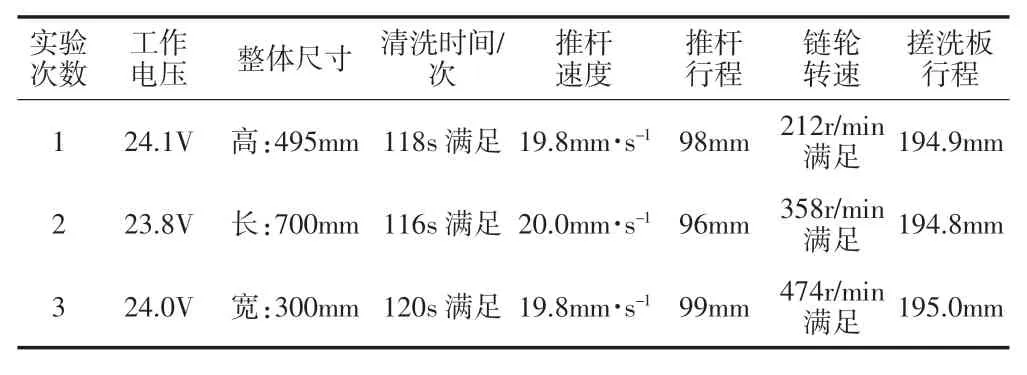
表4 实验测试数据
6 结语
设计了一种毛巾自动清洗拧干机,从设计方案、理论校验计算等方面对产品进行了研究设计。运用了Solidworks 软件对所设计的模型进行了有限元分析和运动学仿真,分析所设计的机构的可靠性以及所选用的链轮结构进行校验。最后通过实物测试,在产品的各项指标都满足技术和市场需求的情况下,进一步校验了毛巾清洗拧干机的可靠性和合理性。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
煤(2022年6期)2022-06-13
机械制造(2022年3期)2022-04-07
舰船科学技术(2021年5期)2021-07-03
小学生学习指导(高年级)(2021年3期)2021-04-06
中国金属通报(2020年21期)2020-12-09
中国金属通报(2020年23期)2020-03-15
中国设备工程(2019年13期)2019-08-06
汽车零部件(2018年11期)2018-12-08
