
面向慢性病中老年患者的智能机械药盒设计
2021-01-13 12:17:54简宏达彭九九胡文韬陈周周熊满满李公法
装备制造技术 2020年10期
简宏达,彭九九,胡文韬,陈周周,熊满满,李公法,陶 波
(武汉科技大学冶金装备及其控制教育部重点实验室,武汉430081)
随着社会老龄化的日益加重,我国老年人所占人口比例越来越高,其人数居世界之最。而医疗问题是该群体是需要面对的主要问题之一,患多种慢性病、需长期服用不同种类和不同剂量药物的情况在中老年人中屡见不鲜。对于行动不便、记忆力差且常年独居的中老年人群体、需长期服用多种药物的全年龄段患者来说,“忘吃药、吃错药、吃多药”问题亟待解决[1]。因此,各类辅助型药盒产品开始活跃在市场上。传统药盒结构简单、便于携带,但较小的尺寸使其存放药物数量受到局限,续航能力较弱,在10次左右不等,无法做到一次装填后长时间使用。传统药盒需要人工进行药物计数与药物装填,一般只具备储存药物和闹钟提醒功能,对缺少照料的老年慢性病患者无疑是繁琐且具有错误装填风险的。
设计开发的智能机械药盒区别于传统药盒,以电力驱动,结合机械结构与电子传感器板块,实现使用者“一次装填,长期使用”的便捷服药。针对老年慢性病患者在智能产品的使用上可能存在障碍,智能机械药盒极大程度上简化了使用操作[2,3,4]。
1 智能机械药盒方案设计
1.1 系统组成
智能机械药盒装置设计了药片和胶囊两个部分(图1)且均由5个子系统组成:储药出药系统、传动系统、计数收集系统、辅助系统、控制系统,每个子系统的功能如下[5]:

图1 药片部分(左)与胶囊部分(右)去外壳总体结构图
(1)储药出药系统:药片部分中表现为类圆柱空心储药罐与带负压吸口推杆,推杆沿储药罐轴线往复直线运动,实现药片的排出;在胶囊部分表现为类圆柱空心储药罐、胶囊滑轨和带凹槽出药滚子,出药滚子周向旋转用以实现胶囊的排出。
(2)传动系统:两个部分均由步进电机、传动齿轮、棘轮机构组成。步进电机的换向旋转由传动齿轮带动各部分两组棘轮机构分别旋转,实现对不同药品不同数量的顺序排出。
(3)计数收集系统:药片部分表现为舵机、扫药曲柄、扫药杆、导轨、红外光感传感器,舵机由曲柄带动扫药杆将推杆顶部药片扫入导轨,由导轨末端对射型红外传感器实现计数功能。在胶囊部分表现为导轨、力敏传感器,胶囊由出药滚子排出至导轨,在滑轨末端的薄膜式压力传感器实现计数功能。
(4)辅助系统:两部分均包含用于固定储药出药装置的托台、固定传动系统的底部支架、防药品在排出过程中粘黏的震荡块以及药品干燥器装置。
(5)控制系统:主要采用单片机作为主控芯片,用以实现各机构运动的配合衔接和时序控制。
1.2 工作原理
药片部分由步进电机通过主传动齿轮带动与棘轮部分配合的副传动齿轮转动,两侧的棘轮沿相同的方向转动带动曲柄,安装在两侧的棘轮轮齿方向相反,使步进电机在进行不同方向转动时,仅有一侧棘轮会带动其所对应的药片棘轮曲柄转动,另一侧保持静止状态,实现两侧出药机构运转的独立控制。当曲柄沿着一个方向转动时,对应转动方向上的药片棘轮曲柄带动滑块在竖直平面内做圆周运动,由于滑块、滑道和推杆共同组成了一个曲柄滑块机构,故推杆会随药片棘轮曲柄的转动做竖直方向的往复运动,实现出药动作。在完成出药动作的过程中配合置于药盒壳体背面的舵机所控制的扫药杆,将药片扫入导轨内,并由导轨末端对射型红外传感器实现计数反馈至集成控制板,最终完成出药,药片棘轮曲柄回到初始位置[6,7]。
胶囊部分与药片机构的传动方式类似,同样使用步进电机作为动力源件,以两个反装棘轮实现两组胶囊机构的独立控制[8]。锥齿轮由传动齿轮带动,通过棘轮使出药滚子转动。出药滚子沿着某一个方向转动时,与其对应配合的胶囊滑轨底部开口的胶囊落入出药滚子对应的凹槽中,由于步进电机的不断运转,出药滚子会单方向不断转动,实现往复出药动作,在胶囊由出药滚子排出后,进入与之配合的胶囊导轨中,进而滑出药口,由力敏传感器实现计数并反馈至集成控制板,直至单侧胶囊出药数量达到设定值,步进电机换向旋转,实现另一侧的出药动作。
1.3 不同规格药品兼容问题的解决
对于药片多具有片状特征,在进行相关计算后,只需对气泵参数进行相应的调节,即可配合特殊端部形状的顶杆,由一确定负压力实现对不同规格药片的出药任务。
对于胶囊多为类圆柱状,进行相关市场调研,发现市面上常见的胶囊,最大的尺寸为17 mm×8 mm,最小尺寸的为12 mm×6.5 mm,滚子的凹槽尺寸为20 mm×9 mm的矩形凹槽,深度为10 mm,即可兼容绝大多数胶囊的出药任务。
2 机械结构设计
2.1 药片储药出药装置设计
药片储药出药装置由一个类圆柱的空心储药罐与推杆组成,推杆可在储药罐内沿轴线方向线性运动,装配关系如图2所示,推杆由滑道、滑块、棘轮曲柄构成的曲柄滑块机构带动,曲柄转动时使滑块相对滑道水平移动,滑道带动推杆在竖直方向线性往复运动,其装配关系如图3所示[9]。推杆顶部采用锥形设计,顶端直径为4 mm,与药片最小直径相当。推杆内部加工有小直径通孔,用于连接外部的负压装置(气泵),实现对单个药片的吸附,保证在大多数情况下推杆上下运动一次,推出一颗药片[10,11]。

图2 药片储药出药模块
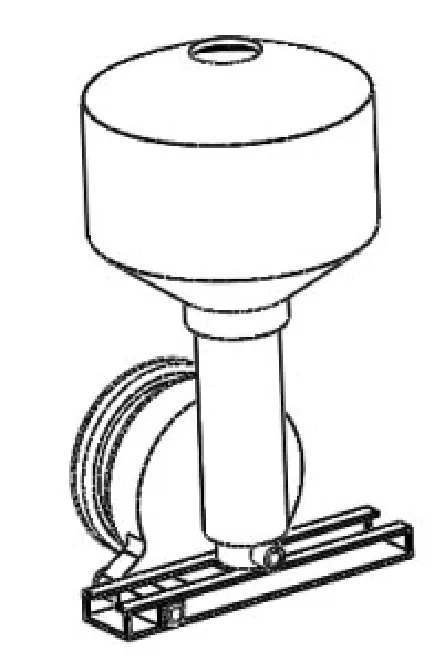
图3 药片储药出药装置与曲柄部分的连接
针对气泵负压吸药,对其具体数学模型采用近似的解。根据文献查阅,相应的计算公式如下:

上式中:F为理论吸附力大小,kg(f公斤力);P为绝对压力,为微型真空泵的绝对真空度,kPa(千帕);S为吸盘面积,为吸盘有效面积,cm2。
本产品中,推杆中间的气孔直径D=0.4 cm,有效吸盘面积为S=π×D2/4=0.12 566 cm2
选用的型号为VN-T4型号的气泵,真空度为60 kPa,理论上能提供的抽吸压力压强为:

负压通孔理论上能在竖直方向上吸附0.3 kg的物体,而常见的药物通常仅有0.3 g左右,考虑到气孔吸住药片时吸盘有效面积不是整个气孔孔口,但理论吸附质量远大于单粒药片,所以可以极大程度上增加顶出药片的几率。
曲柄的转动是其运动的主要形式,其中所受最大应力的应是曲柄与滑块连接销所受剪切力,主要对此连接销进行了有限元分析,即可验证其强度是否满足设计要求。将药片出药系统模型进行简化,由于两侧装置对称,因此在导入网格时仅考虑一边的受力情况即可,只保留一半进行分析,模型所采用的材料为聚酯树脂,所有的零件之间都建立解除对,两接触面之间所设置的摩擦系数为0.05,载荷在曲柄的最外侧施加切向力100 N,施加边界条件后划分网格进行求解得到的连接销模型应力、应变云图如图4、图5所示。
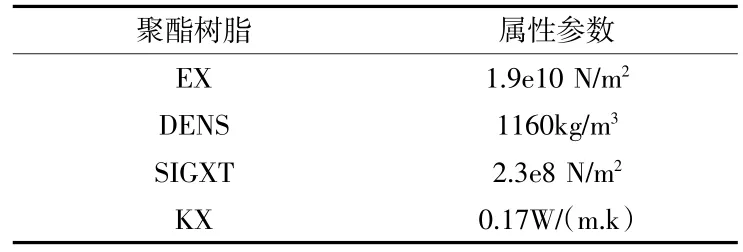
表1 智能机械药盒主要材料属性参数

图4 连接销工作部位应力图

图5 连接销应变图
2.2 胶囊储药出药装置设计
胶囊储药出药装置由一个下端接圆锥的类圆柱空心储药筒、胶囊传输杆、出药滚子和胶囊导轨组成,出药滚子可沿轴线旋转,装配关系如图6所示。储药室下部为一偏心圆锥,底部有与胶囊直径相符合的开孔,且开孔衔接于一倾斜空心传输杆,传输杆末端的开口长度与胶囊长度相当,且位于开口下端的出药滚子上的凹槽也与其配合,保证在大多数情况下,出药滚子旋转一周,只排出一粒胶囊。

图6 胶囊储药出药装置装配关系
2.3 可独立控制的传动装置设计
药片、胶囊系统皆包含两组(分别对应两种药片、胶囊药物)机构,传动齿轮的两侧分别装有两个刚性齿形表面方向相反的棘轮,当传动齿轮朝着排出某类药片或胶囊的对应方向转动时,只有与其对应的棘轮在棘爪的带动下随之一起转动,而另一侧的棘轮曲柄会因刚性齿形表面的摩擦力而保持静止,反向转动时则排出另一类药片或胶囊,实现不同种类药物的独立计数。用两台步进电机做动力源分别控制两个系统,通过步进电机的正反转动,实现传动装置的独立控制。
本结构的动力元件为步进电机,通过齿轮传动将动力传递到执行机构上,此处选择齿轮所受应力最大的一对齿轮进行应力分析和强度校核此处两齿轮相同,齿数均为20,模数为2 mm,分度圆直径为20 mm,压力角为20°,所承载的扭矩T=2 kN·m。
根据文献查阅,直齿轮的接触疲劳强度公式如下:

KH为接触疲劳强度计算的载荷系数:

式中ZH为区域系数,ZE为弹性影响系数,Zε为基础疲劳强度计算的重合度系数。
由公式可计算出此机构中齿轮接触疲劳强度为9.36e7 N/mm2小于许用应力,故该设计中传动齿轮应力分析和强度校核通过。

图7 药片棘轮机构(左)与胶囊棘轮机构(右)

图8 步进电机、传动齿轮在药片部分(左)、胶囊部分(右)的装配关系
3 控制系统设计
3.1 控制系统流程图
控制系统主要采用STC15F2K60S2型集成CPU作为主控芯片,共使用两个,分别控制药片部分和胶囊部分的独立工作,实现各机构运动之间的配合衔接、时序控制、和反馈信号检测,其控制流程图如图9所示[12,13]。
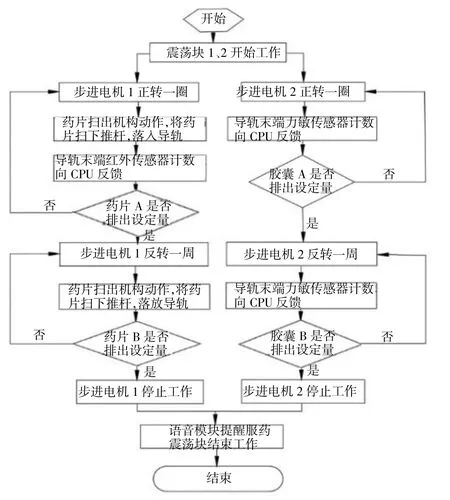
图9 智能机械药盒控制系统流程图
3.2 电路原理图
药盒电路主要由集成主板部分、时序控制部分、语音提醒部分、动力传输部分、取药计数部分、辅助震荡部分组成,其原理图如图10所示[14]。

图10 药片部分与胶囊部分的电路原理图
4 应用效果
使用前由亲属或看护人员等将需长期服用的药片与胶囊存放于对应的药物储药罐(筒)内,并按医嘱完成各类药物服用时间、服用剂量以及响铃提醒时间等基础参数的录入。接通电源后,智能机械药盒将在设定服药时间响铃提醒患者,患者从收集袋中取出药物及时服用即可。该智能机械药盒相比于传统药盒更便捷、更安全、智能化程度高,能有效提升中老年慢性病患者群体的医疗舒适度,为患者的康复提供客观保障。
5 结论
智能机械药盒设计利用了药片和胶囊的特性,能兼容市场上的大多数药物,实现不同种药物的定时定量排出。该智能机械药盒通过负压、曲柄滑块机构、棘轮传感器计数等设计实现了药片和胶囊药物高效稳定的出药,同时尽可能减少药盒中的动力源数量,节约了成本,降低了编程难度,减小了药盒体积。多种传感器的运用使得药物计数方便、可靠。顺应生活用品数字化、智能化、可靠化的时代趋势,家居智能机械药盒必将会得到进一步的推广和应用。
猜你喜欢
东北大学学报(自然科学版)(2021年1期)2021-01-15 09:30:14
奥秘(创新大赛)(2020年3期)2020-11-28 23:40:32
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
作文大王·低年级(2019年4期)2019-05-13 01:44:10
发明与创新(2018年6期)2018-04-01 11:11:05
发明与创新·中学生(2018年2期)2018-02-07 18:21:36
中国民族医药杂志(2016年1期)2016-05-09 08:34:47
哈尔滨医药(2015年1期)2015-12-01 03:56:58
电气化铁道(2015年2期)2015-06-29 10:05:39
机电信息(2014年5期)2014-02-27 15:51:43
