地铁辅助逆变器新型控制策略研究
2021-01-12 04:48:58
电气传动 2021年1期
(中车青岛四方车辆研究所有限公司,山东 青岛 266000)
地铁辅助逆变器(auxiliary power converter,APC)系统多采用并联模式为列车提供3N-380 V电源,以保证整车空调、制动空压机、应急电源、电暖风等设备的正常运行(见图1),并提高系统容量,增加系统冗余性。目前地铁列车为提高运行效率,实现节能减排的目标,多采用变频空调及单相整流设备等。非线性及单相负载的增加,导致地铁辅助逆变器系统输出电压总谐波含量(total harmonic distortion,THD)增大,加剧了整车3N-380 V母线(中压母线)负载压力,降低了负载的可靠性和使用寿命,同时THD含量增加也对APC锁相控制产生高频谐波干扰,导致逆变器并联系统谐波环流增加,进一步增加了逆变器损耗,增加逆变器滤波电容电流应力,降低硬件寿命。
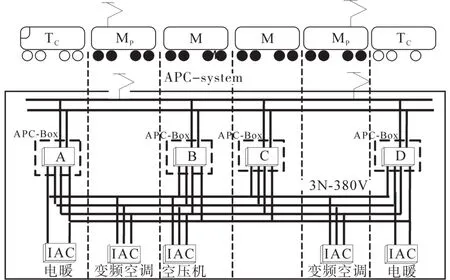
图1 地铁列车辅助系统分布Fig.1 Distribution of subway auxiliary system
地铁列车辅助并联系统一般由列车装载的2台或多台APC实现内部组网(3N-380 V),并带动负载运行。内部电网不具备广义电网的耐冲击特性,因此APC必须满足在组网电压谐波含量较大的情况下依然可以精确锁相。传统锁相控制策略一般在q轴下对输出电压的直流分量Uq进行PID运算,文献[1]提出了一种在同步旋转坐标系下,依次提取谐波分量的控制方法,该方法可实现对谐波分量的提取,但存在运算量大及实时性不高的问题。在内网运行时,Uq分量存在叠加的高频谐波分量,如采用传统直流滤波模式则会造成相位延时,严重时可造成锁相失败。陷波器能有效地抑制相移及边界畸变,具备高度实时性,因此对q轴分量采用陷波器代替传统滤波,可实现直流分量的准确提取,抑制谐波分量,保证锁相的实时性。
现阶段辅助逆变器多采用基于同步d-q坐标系下的PID控制策略,其实现简单,可独立于被控对象数学模型,实现稳态跟踪,但对于时变的谐波分量很难实现无静差实时跟踪,且在d-q坐标系下提取输出电压谐波分量的直流量也需要较大的计算量。准比例-谐振控制(准PR控制)可实现对交流信号的实时跟踪,并在跟踪点实现较大增益。因此准PR控制可以在α-β坐标系下实现对APC输出电压谐波分量的抑制[2-3]。相比于传统的PID控制,既减少谐波分量的计算量,也减少了因滤波等因素造成的相位延迟,实现了对谐波分量的快速抑制。
1 APC控制策略
如图1所示,地铁列车辅助逆变器的输出侧短接,构成中压母线网络,列车负载统一悬挂在中压母线网络,以完成自身功能。APC多采用工频隔离变压器方案,其中变压器采用三相四线制输出以满足系统单相负载要求。本文中采用的控制策略使用准PR控制代替传统的PID控制实现输出电压幅值-频率控制,同时在工程应用中使用陷波器代替传统滤波器(见图2)实现精确锁相。
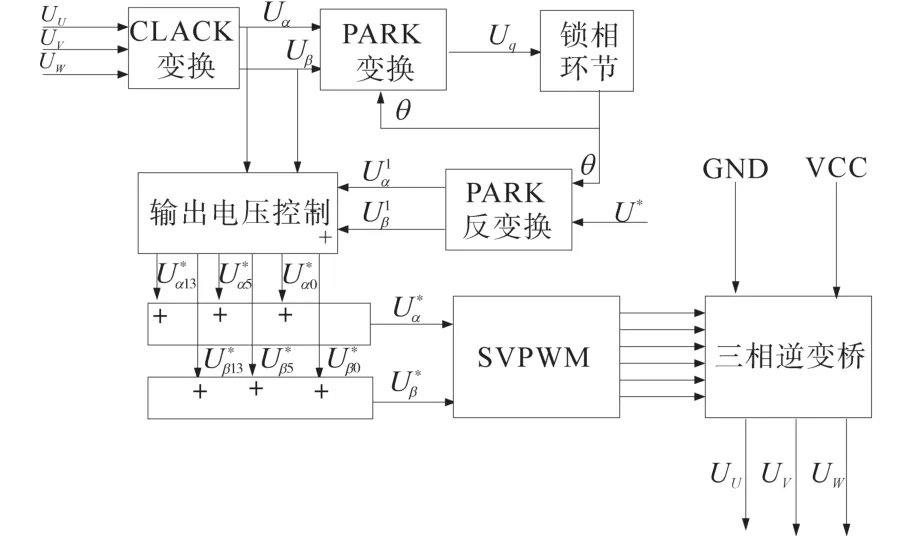
图2 APC并联控制系统结构图Fig.2 The structure diagram of parallel control system for APC
辅助逆变器并联系统为实现对输出电压和频率的控制,其核心部分包括2部分:
1)对输出电压相位进行判断的锁相环节。
2)对输出电压幅值、频率进行控制的输出电压控制环节。
1.1 锁相模式
图3中,传统锁相环节对q轴电压直流分量Uq进行低通滤波后送入PID调节器。低通滤波器截止频率一般设定在150 Hz左右,以达到对5次、7次、11次、13次谐波的抑制作用。因此通过滤波环节后Uq产生明显相移,锁相结果偏离实际目标值。
本文中采用陷波器代替低通滤波器,作为谐振电路的一种,合理设计陷波器截止频率,可使其只针对谐波含量较高的频率点(5次、7次、11次、13次谐波),既实现对低通滤波器对Uq的滤波功能,也消除了低通滤波器带来的固有的相位偏移问题。
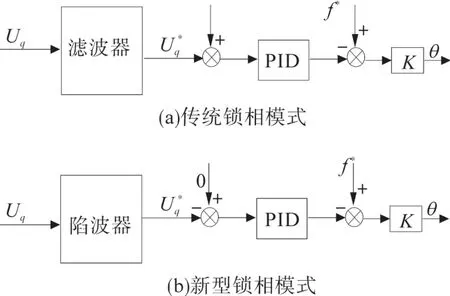
图3 锁相模式对比结构图Fig.3 Phase-locked mode contrast structure diagram
1.2 输出电压控制
根据内模原理,控制器须包含信号的模型才可以实现对被控变量的无静差跟踪,PID控制策略中integral环节采用1∕s作为传递函数,因此其只能对阶跃信号进行调节及无静差跟踪,辅助逆变器输出电压为标准50 Hz正弦信号,采用传统控制策略只能对d轴电压直流分量Ud进行低通滤波后送入PID调节器,输出结果经Park反变换后生成脉冲控制分量。其存在控制滞后、抗干扰能力差、波形畸变等问题。
新型控制策略(见图4),系统使用U*及θ生成α-β坐标系下基波电压的目标量U1α,U1β,通过基波准PR控制器,达到对基波电压的有效控制。对于系统输出电压谐波含量较大的5次、7次、11次、13次谐波,通过使用在该频率点的准PR控制器进行谐波抑制,最后将α-β坐标系下的控制变量进行综合并送入SVPWM中,生成控制脉冲。
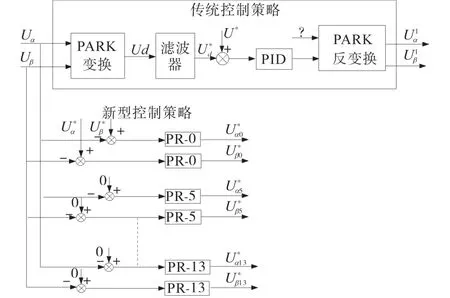
图4 输出电压控制对比结构图Fig.4 Output voltage control contrast structure diagram
2 准PR控制特性及离散化处理
比例谐振控制器是一种基于内模原理的控制器,一般由比例项及广义积分项2部分构成[4],其传递函数为

式中:KP为比例环节系数;KR为谐振环节系数;ω0为谐振频率。
将s=jω代入式(1),可以发现PR控制器在谐振频率点具备理论上的无穷大增益,但其增益频率范围过窄,且频率发生偏移时,增益衰减剧烈(见图5)。
地铁逆变器并联系统,其输出频率在下垂控制的作用下,处于一定范围内的波动状态(50±0.5 Hz),因此为克服PR控制频带过窄的问题,引入准PR控制[5]。准PR控制的传递函数为

式中:ωc为控制器截止频率。
将s=jω代入式(2),可以发现GKPR=KP+KR,其增益可控,避免了无穷大增益带来的系统噪声。
将2种控制函数在同一个Bode图中绘制,采用系数KP=KR=1,ωc=0.05ω0,可得图5。
如图5所示,在50 Hz处,GKPR(s)相比于GPR(s),其频带增加,且降低了谐振频率点的过高增益,进而降低系统噪声[6-7]。
式(2)的核心控制参数包括KP,KR,ωc,其分别取不同值时对系统影响如图6所示。
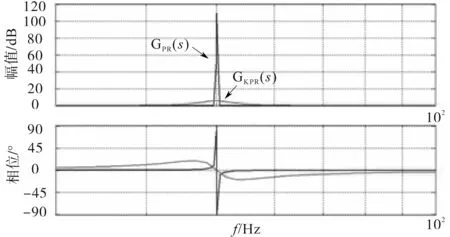
图5 PR控制-准PR控制Bode图Fig.5 Bode diagram of PR control-quasi PR control
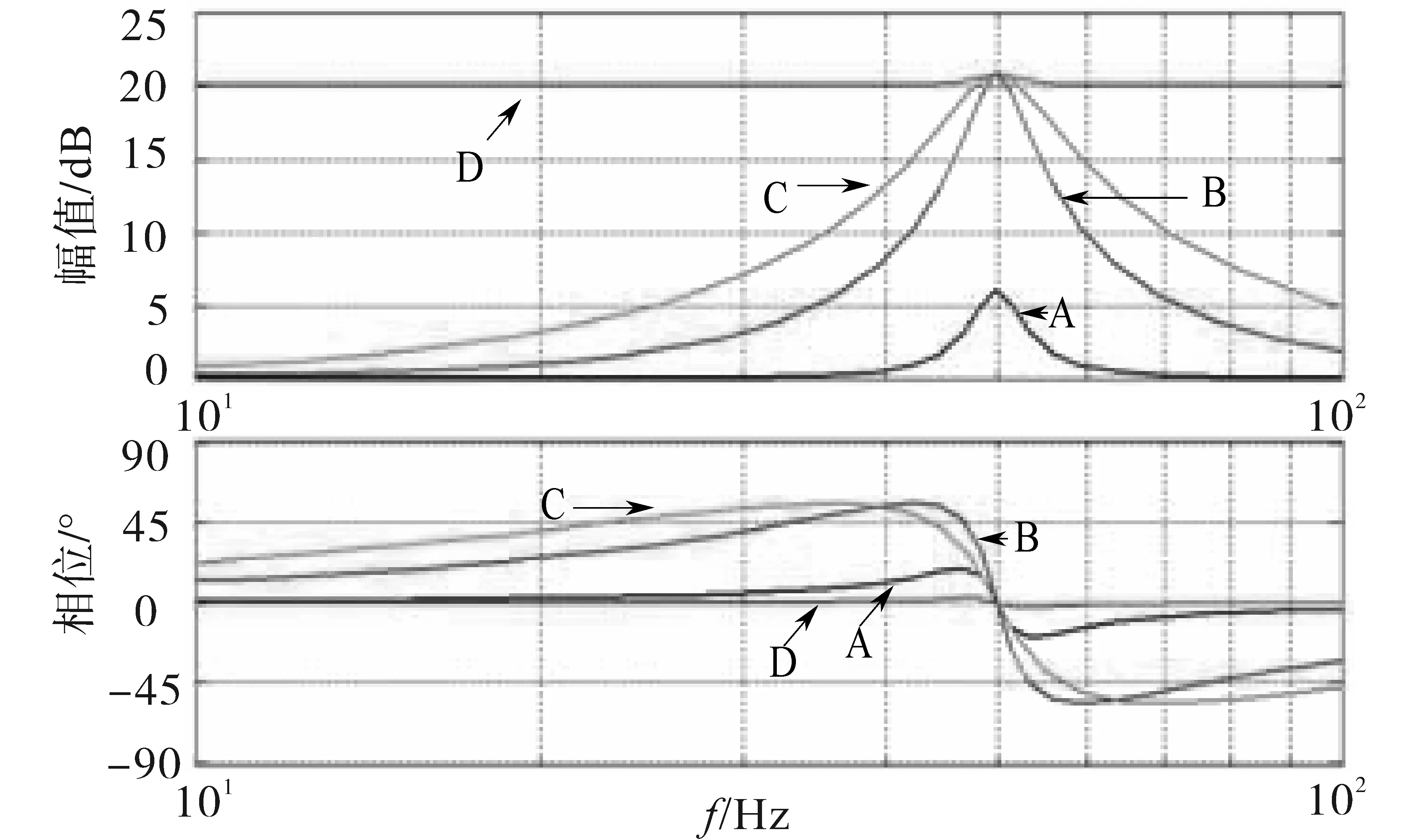
图6 准PR控制参数Bode图Fig.6 Bode diagram of quasi PR control parameter
图6中曲线取值如表1所示。
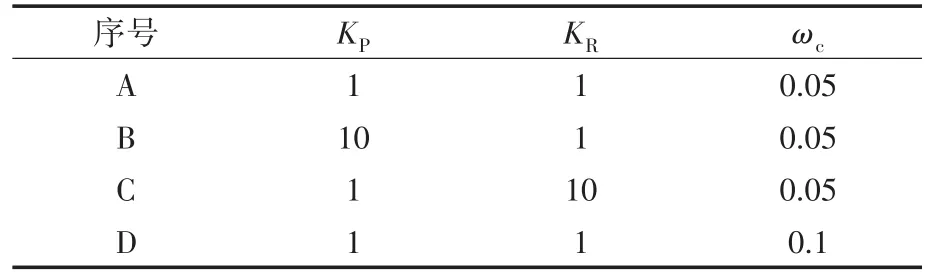
表1 KP,KR,ωc参数Tab.1 KP,KR,ωcparameters
结合图6及表1可以发现,KP增加可以影响整个频带范围内系统增益;KR对于谐振频率点系统增益及相位裕度有较大影响[8];ωc决定了系统的频带宽度,ωc越大频带宽度越宽。综合以上信息,采用KP=KR=10,ωc=0.000 05ω0作为控制参数。
当PR控制器需调节5次、7次、11次、13次电压谐波时,式(2)可扩展表达为
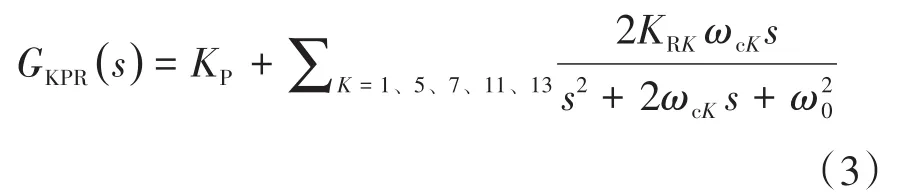
式中:K为谐波次数;KRK为各次频率谐振环节系数;ωcK为各次频率控制器截止频率。
式中谐振频率分别为基波、5次、7次、11次、13次谐波。
通过仿真可以得到式(3)控制Bode图,如图7所示。
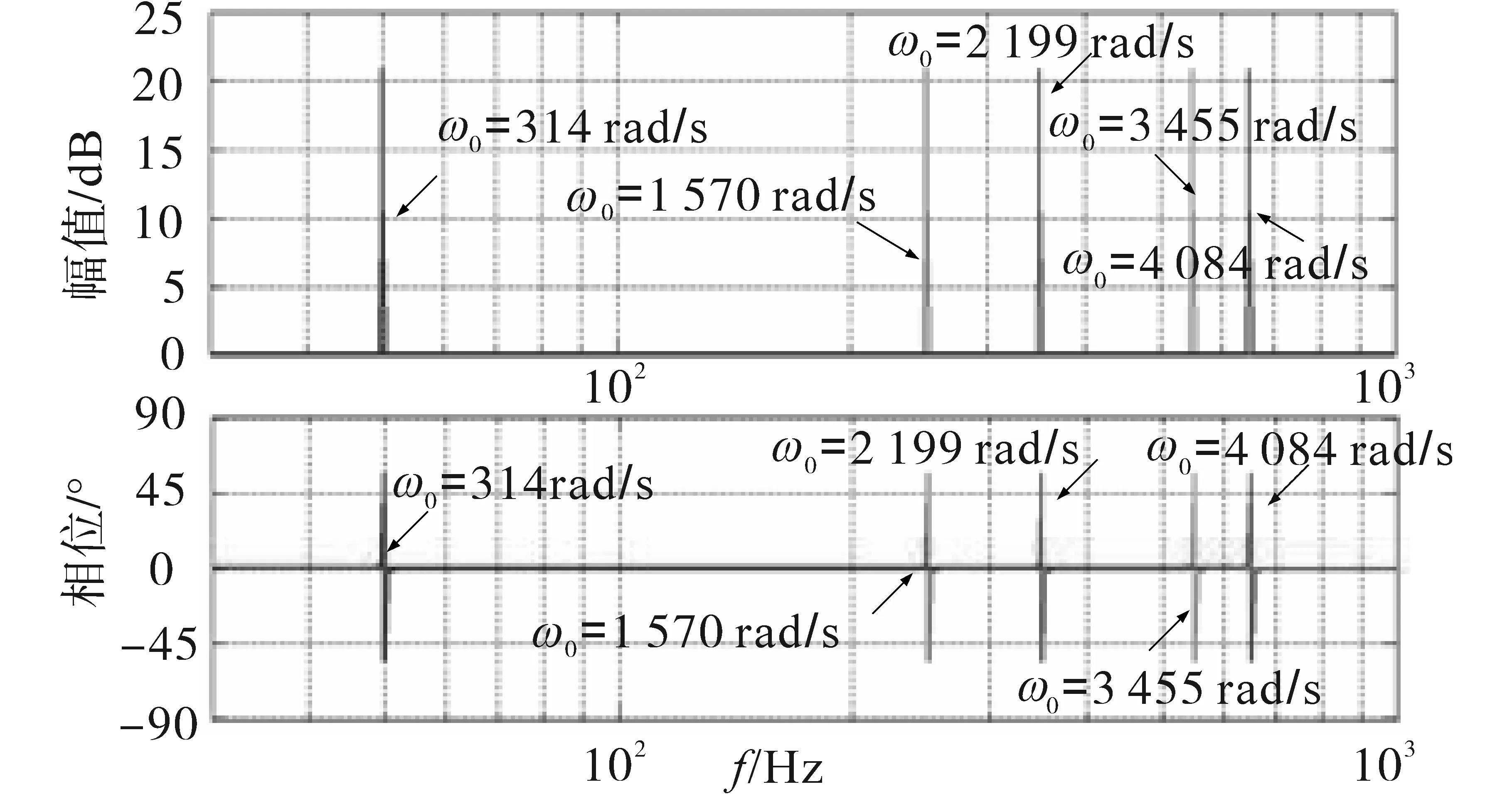
图7 准PR控制Bode图Fig.7 Bode diagram of quasi PR control
从图7可知,准PR控制器在50 Hz,250 Hz,350 Hz,550 Hz,650 Hz等谐振频率点有20 dB以上增益,且具备1 Hz的频带宽度,满足系统频率波动范围。
准PR传递函数在DSP芯片中的计算频率一般在5 kHz以上,因此其离散化多采用一阶后向差分方程进行:
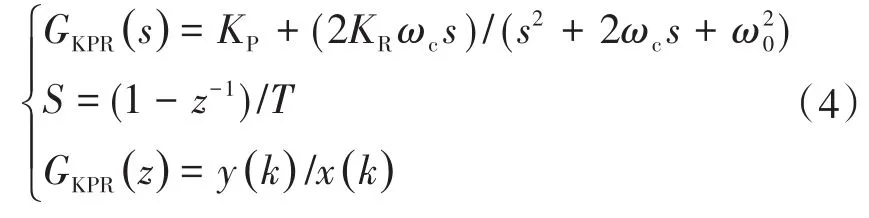
式中:T为DSP采样时间;z为传递函数零点。由式(4)计算可得:
式中:kx,ky为输入和输出信号系数。
将控制参数代入上述公式,即可得到在不同DSP计算频率下准PR控制器离散参数[9]。
3 陷波器特性及其离散化处理
对于一个存在谐振的辅助逆变器系统,可以通过向系统控制中加入陷波滤波器来减小谐振频率点处的幅值,以达到谐振补偿的目的,抑制方法的基本原理如图8所示。从图8中可以看出,通过合理设计陷波器的参数,将谐振频率点处的幅值大致抵消,最后使系统频率响应趋近平滑,达到谐振抑制的目的。
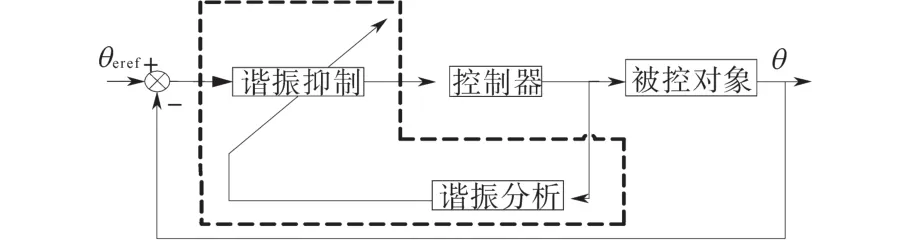
图8 基于陷波器的动态抑制原理图Fig.8 Schematic of dynamic suppression based on notch filter
陷波器可理解为一种频带宽度极窄的带阻滤波器,优秀的陷波器必须同时满足以下2点[1,10]:1)在设定频率点具备较大衰减值,以保证具备较好的滤波效应;2)陷波频带宽可设置,以对有用频带不产生相移及幅值损伤。
陷波器是无限冲击响应(IIR)数字滤波器,该滤波器可以用以下常系数线性差分方程表示:

式中:x(n)和y(n)分别为输入和输出信号序列;ai和bi为滤波器系数;M为用到的之前输入值的个数;N为用到的之前输出值的个数。
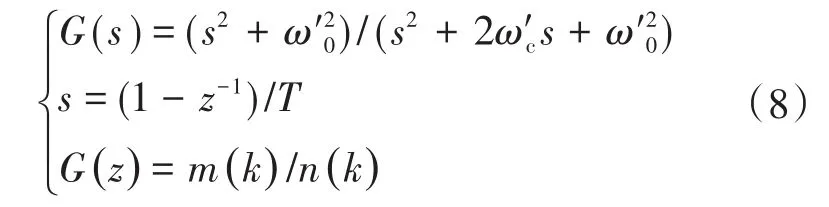
对式(6)两边进行s变换,得到数字滤波器的陷波器传递函数[11]如下式:

式中:ω′c为陷波器截止频率;ω′0为陷波器设定频率。
不同ω′c取值对陷波器性能的影响如图9所示。随着ω′c增加系统增益,相角裕度及频带宽度都会增大,文中选取控制参数ω′c=0.002ω′0。
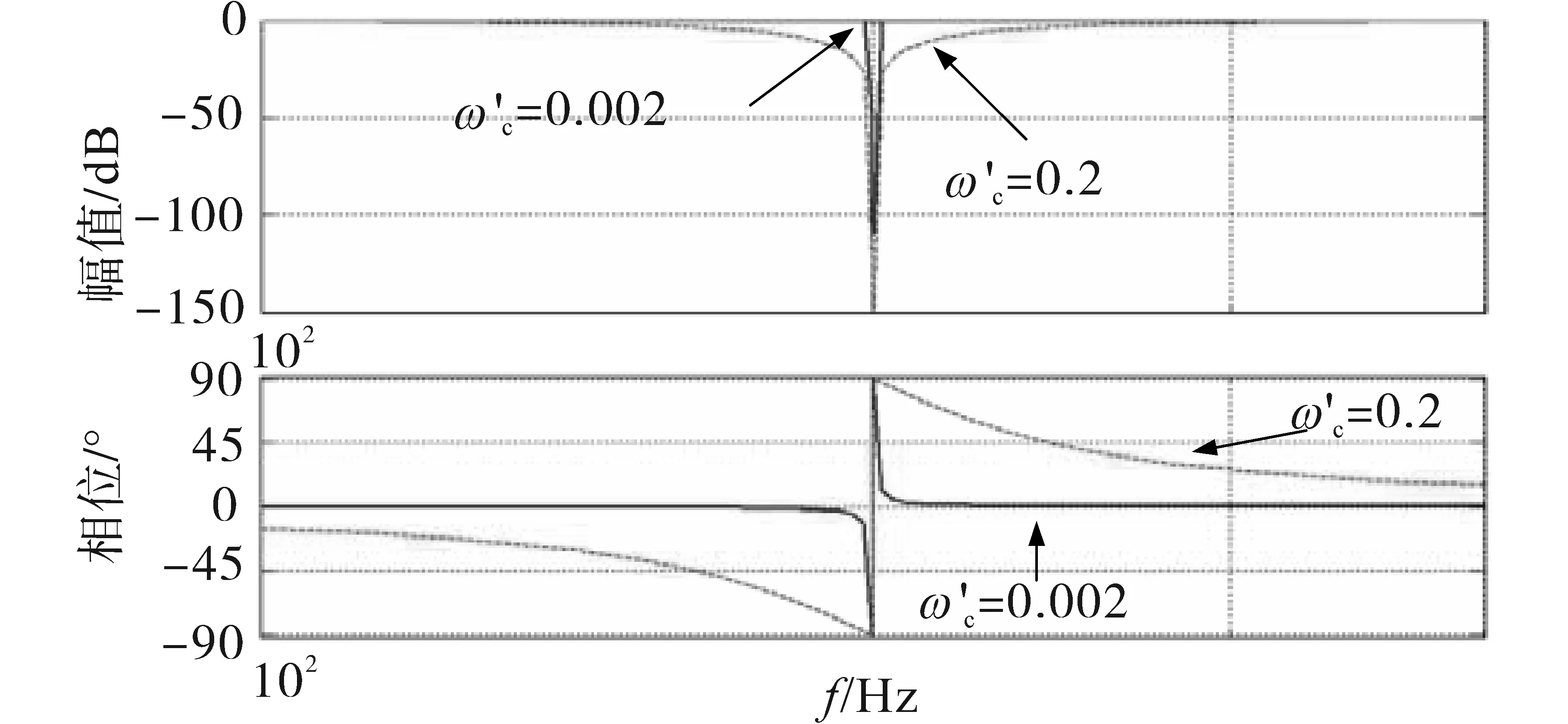
图9 ω′c不同取值性能对比Fig.9 Performance comparison with different values ofω′c
针对n次电压谐波,在基波正序d-q坐标系下表现为n-1次谐波分量,因此在n次电压谐波抑制中需将设定频率设置在n-1次谐波处,并绘制5次、7次、11次、13次谐波陷波器Bode图,如图10所示。
从图(10)中可得,陷波器在400 Hz,600 Hz,1 000 Hz,1 200 Hz等设定频率点有100 dB以上衰减,且具备大于1 Hz的频带宽度,同时在基波频率处,系统无衰减。
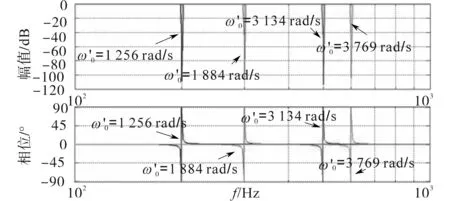
图10 陷波器控制Bode图Fig.10 Bode diagram of Notch filter control
在高速DSP运算中对陷波器的离散化与准PR控制一致,均采用一阶后向差分进行离散化处理[12]:
由式(7)计算可得:
式中:kn,km为输入和输出信号系数。
将控制参数代入上述公式,即可得到在不同DSP计算频率下陷波器离散参数。
4 系统仿真及试验验证
文中采用仿真分析—硬件试验的研究方法,对以上控制理论进行验证,其中仿真系统采用基于Matlab∕Simulink-S-Function的在线离散化仿真,仿真系统使用DSP内置函数,运行时间及硬件参数与实物保持一致。
具体参数如下:直流输入电压1 500 V,三相变压器变比为640 V∕380 V,输出滤波电感0.25 mH,输出滤波电容 3×550 μF∕三角接,负载为非线性负载,功率50 kV·A,系统计算频率为20 kHz,系统开关频率为1.35 kHz,输出电压3N-380 V,输出频率为50.5 Hz。
其中采用新型控制策略的辅助逆变器系统输出电压、电流波形如图11所示。其输出电压FFT分析结果过如图12所示。
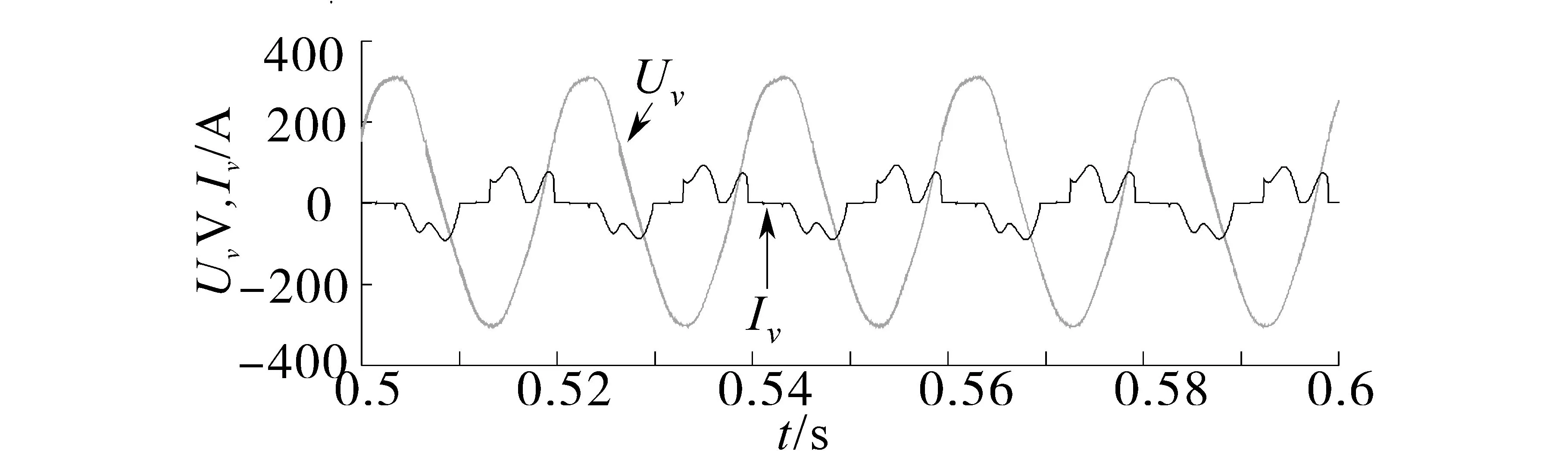
图11 采用新型控制策略V相输出相电压-电流Fig.11 V-phase output phase voltage and current using new control strategy
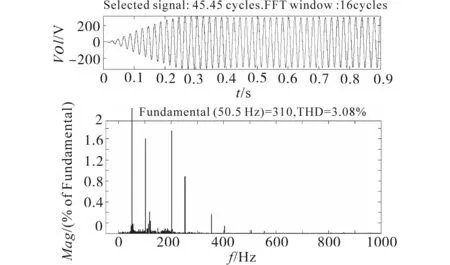
图12 采用新型控制策略V相输出相电压FFT分析Fig.12 FFT Analysis of V-phase output phase voltage and using new control strategy
采用传统PID控制策略的辅助逆变器系统输出电压FFT分析结果如图13所示。
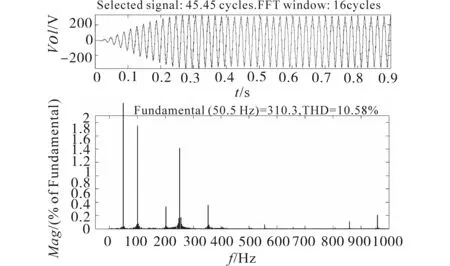
图13 采用传统PID控制策略V相输出相电压FFT分析Fig.13 FFT Analysis of V-phase output phase voltage using traditional PID control strategy
如图11所示,在非线性负载条件下,逆变器输出电流表现为明显的马鞍波,图12、图13中系统选取0.4 s作为FFT分析输入波形起点,对16个正弦波周期进行FFT分析,在负载为非线性负载及单相负载前提下,采用传统PID控制策略的辅助逆变器系统THD达到10%左右,电压发生了明显畸变;采用新型控制策略的辅助逆变器系统其THD仅为3.08%,且系统运行频率为50.5 Hz,从而验证了文中设计的准PR控制器具备较高的频带宽度和增益幅度,满足铁路系统50±0.5 Hz的系统要求。
d-q坐标系下q轴直流分量滤波效果对比如图14所示。
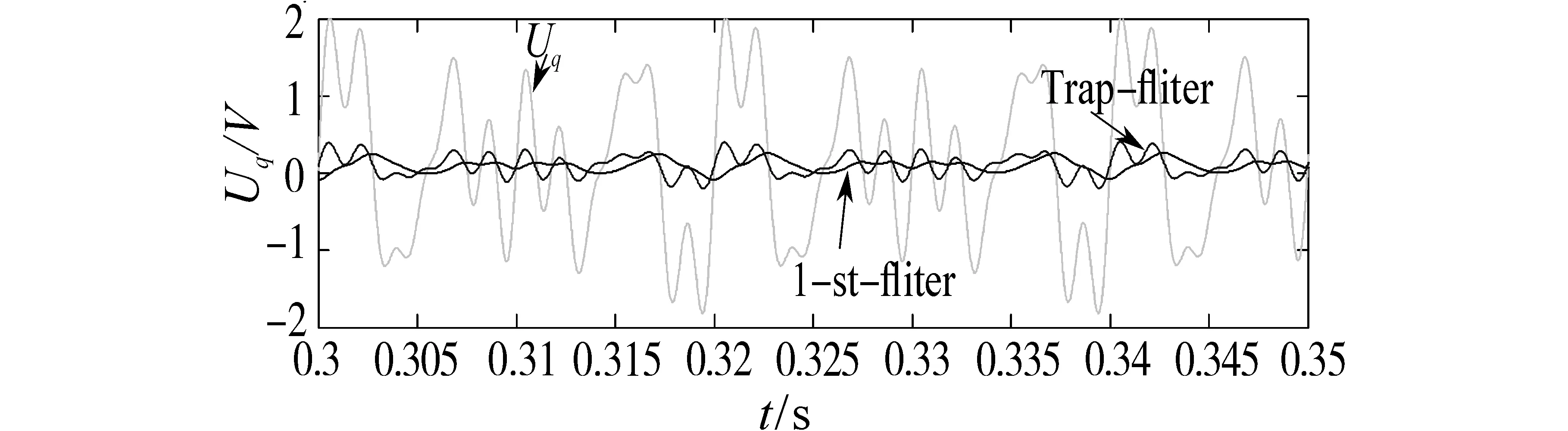
图14 q轴电压分量滤波效果对比Fig.14 qaxis voltage component filtering effect comparison
如图14所示,对于d-q变换生成的Uq直流分量,由于叠加了高次谐波分量,导致Uq出现畸变。分别采用一阶低通滤波及陷波器进行滤波,从图14可以看到,一阶低通滤波虽然可以减少谐波分量,但波形失真严重,对系统控制产生不必要的噪声;陷波器在保留基波直流分量幅值-相位的前提下,将谐波分量大大减少,保证了波形的实时性。
为验证仿真分析结果,构建了标准的地铁辅助逆变器试验平台,平台主要包括青岛地铁1号线辅助逆变器系统、变频空调系统、示波器、三相品质分析仪等。在试验平台进行了辅助逆变器带变频空调运行试验,试验结果如图15、图16所示。
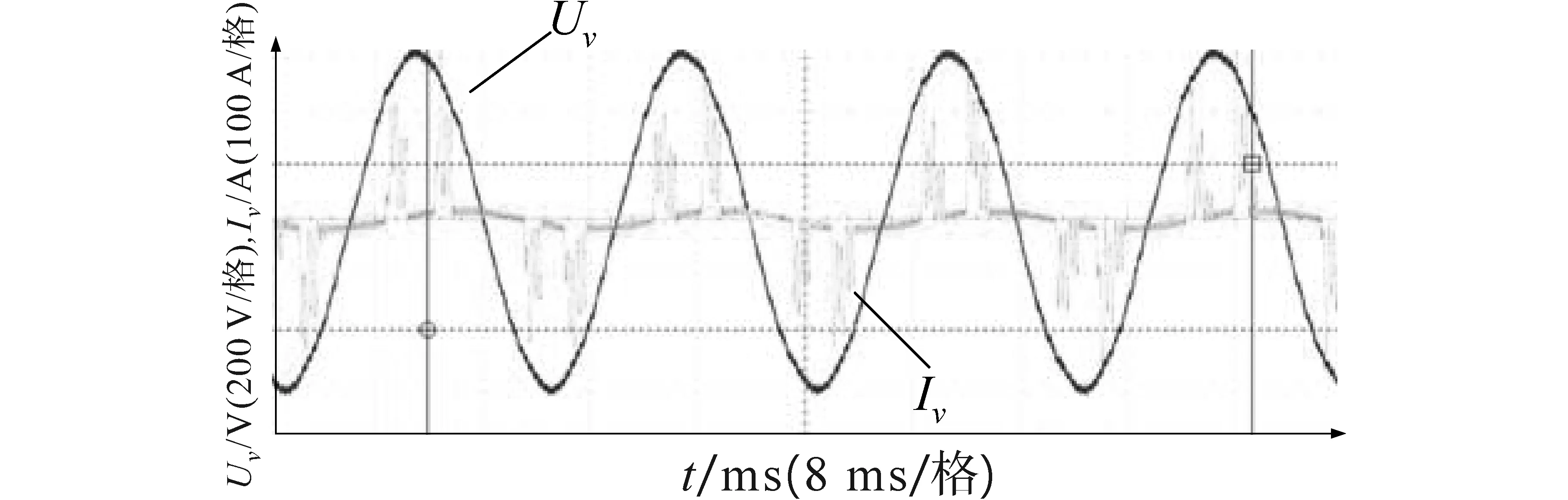
图15 V相输出相电压-电流Fig.15 V-phase output phase voltage and Current

图16 V相输出相电压FFT分析Fig.16 FFT analysis of V-phase output phase voltage
图15为示波器采集输出V相相电压及相电流,图中电流出现明显畸变,电压正弦度良好。通过三相品质分析仪对数据分析(图16),可以看到辅助逆变器运行频率为50.499 Hz,其THD含量为1.08%,满足系统设计要求。由于仿真系统使用变频负载作为整流负载,其无法模拟变频空调特性,且相比于变频空调,整流负载在运行时对辅助逆变器造成的影响更为恶劣,因此系统硬件试验结果优于仿真结果。
试验结果中,谐波主要集中在5次、7次、11次、13次频率点,与理论分析及仿真试验结果保持一致,验证了基于准PR控制与陷波器的地铁辅助逆变器的性能满足系统设计要求。
5 结论
主要针对现阶段地铁辅助逆变器负载多样化导致中压母线电压畸变问题进行研究,提出针对性解决方案。方案通过对准PR控制及陷波器的理论分析,建立了新型逆变器控制策略,其克服了传统控制方案无法抑制连续电压畸变的难点,解决了在电压畸变情况下系统锁相失真的问题,并降低了系统运算量。通过软件仿真及硬件试验,验证了控制思路的可靠性,并应用在青岛地铁1号线辅助并联系统上,取得了良好的社会经济效益,具有很高的实用价值。
猜你喜欢
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电测与仪表(2016年6期)2016-04-11 12:06:08
通信电源技术(2016年4期)2016-04-04 02:57:38
西部广播电视(2015年3期)2016-01-15 02:05:44
电测与仪表(2015年8期)2015-04-09 11:50:10
物理实验(2015年9期)2015-02-28 17:36:50
广西科技大学学报(2015年4期)2015-02-27 12:22:27
全球定位系统(2014年5期)2014-08-21 09:50:14
电测与仪表(2014年19期)2014-04-04 12:06:20