
基于EMD-SVD的液压系统故障模糊聚类研究*
2021-01-12 10:50方虎生
机电工程技术 2020年11期
钟 岳,王 钊,方虎生,殷 勤,刘 帅
(陆军工程大学,南京 210042)
0 引言
液压系统是工程机械中常用的传动系统,其传动具有能容量大、反应快、易控制、输出力(或力矩)大等诸多优点,在现代机械中广泛采用。液压系统属封闭的管路循环系统,液压系统故障隐形难以查找是液压传动的主要缺点之一[1],泄漏、气穴这两种是最为常见的液压系统故障。泄漏故障会造成液压机“漏油”现象,导致机械运转失灵;而气穴则会导致机组受液体撞击产生高频振动以及内部零件破裂现象,因此通过对液压系统的压力、温度、振动频率等采集信号对液压系统做出及时的故障诊断至关重要。
目前,国内外研究者对于液压系统故障诊断提出了多种方法。李瑞等[2]提出了一种基于小波包重构分解的压力脉动信号时域提取方法来对柱塞马达液压系统进行故障信号诊断,然而此类压力信号输入较为单一,且对于小波函数的选择缺少对比性研究,因此对于诊断结果会产生较大偏差;宫玮丽等[3]提出了一种基于Hilbert包络分析的故障诊断方法,对故障信号进行Hilbert 包络谱解调,去除高频固有共振成分,获得轴承故障信息,通过对振动传感器采集的轴承径向振动信号分析,有效地获得了轴承故障特征,验证了理论方法的正确性。然而,此类方法在分解IMF分量时需要进行多次迭代分解,有些分解模态因能量过下无法表征原信号,从而导致“过分解”现象,影响识别诊断结果。基于此,本次实验同时采用小波变换、Hilbert-Huang 变换方式作为实验对比,比较各类故障信号提取方法的诊断效果。
1 各类信号分解方法
1.1 分层小波阈值分析算法
小波分析属于时频分析的一种方法,是具有“变焦”功能的时域分析方法[4]。实验中选用分层阈值小波消噪算法,通过设置阈值来对振动信号分解之后的小波系数进行阈值处理和重构,由此得到消噪之后的信号。常用的小波消噪阈值函数有软阈值和硬阈值函数。软阈值函数对于仿真信号的消噪在总体趋势上比较准确,相对于硬阈值函数消噪更接近原始信号,同时选用分层阈值处理方法,对小波分解系数进行阈值处理,在分层阈值小波消噪中,将阈值取为:

式中:σ 为信号噪声强度,N 为信号长度,j 为信号分解尺度。当信号小波分解尺度j增加,阈值逐渐变小,该特点符合噪声在小波变换各个尺度上的传播特性。而噪声强度在实验中用小波分解系数来估计噪声强度:

1.2 基于Hilbert-Huang变换的信号提取方法
Hilbert-Huang 变换是经验模态分解和Hilbert时频谱的统称。其首先将信号用EMD方法分解为若干固有模态函数,然后对每个IMF分量进行Hilbert 变换得到瞬时频率和瞬时幅值,进而得到信号的完整时间——频率分布[5]。
1.2.1 EMD算法原理
IMF(固有模态函数)条件如下。
(1)曲线的极值点和零点的数目相等或至多相差1。
(2)在曲线的任意一点,包络的最大极值点和最小极值点的均值等于0。先做出如下假设:任何复杂信号都是由一些相互独立的IMF分量组成;每个IMF分量可以是线性和非线性。因此假设实验信号为x(t),其EMD过程如下。
①确定信号所有的局部极大值和极小值点。
②用三次样条函数对所有极大、极小值点分别进行插值运算,拟合出上下包络并求出上下包络的平均值m1,然后计算:

③判断计算得到h1是否为IMF,是则作为第1 个IMF分量,否则将其作为新一轮迭代初值,返回上述步骤进行k次迭代,最终得到:

使得h1k满足IMF 条件,则h1k就是第一阶IMF,记为IMF1。其中m1k是一阶IMF分量h1k的上下包络线均值。
④从x(t)中减去c1,得到残差:

将r1作为原始数据重复步骤(1)~(3),得到x(t)的第2 个分量c2。以此类推,当rn为单调函数且不能再提取IMF分量时,循环结束,得到n 个IMF分量,其中,rn为残余函数,代表信号的平均趋势。

1.3 基于EMD-SVD变换的信号提取算法
EMD-SVD算法同时结合了小波变换的最佳基选择、传统时频分析方法恒定多分辨率问题以及Hilbert-Huang 变换的线性化、平稳化的信号模态分解问题[6];在此基础上增加奇异值分解(SVD)方法,SVD 是一种正交化方法,通过行或列线性相关矩阵乘以正交矩阵,将原矩阵中线性相关的行(列)线性独立化;其理论依据为:对任一实矩阵Ae×g,其秩为r’,则存在2 个标准正交矩阵U 和W 及对角阵D,使式(7)成立,即为矩阵A的奇异值分解:

矩阵奇异值具有2 个特征:一是良好的稳定性,二是矩阵固有特征。
实验中利用EMD 得到的IMF分量自动形成初始向量矩阵,避免了SVD 构建实矩阵时出现的嵌入维数和延时常数的随意性。
2 模糊聚类分析算法
模糊理论最早由美国加州大学L.A.Zadeh[7]提出,是一种利用精确方法、公式和模型来度量和处理模糊、信息不完全信号的理论。模糊聚类分析通过计算样本信号的隶属度来判断其归属,因此此类方法需要对已知模式类隶属度函数进行建模分析。而在实验中可采用模糊等价关系实现,具体步骤可分为如下3步。
(1)建立模糊相似矩阵;设S={X1,X2,…,Xi}为待聚类的全部样本,每一样本由n个特征表示如下:

首先对任意两样本Xi和Xj求出其互相关系数rij,进而构造模糊相似矩阵R=(Rij)N×M。
(2)改造相似关系为等价关系;将第1 步建立的具有对称性和自反性的模糊相似矩阵转化为具有传递性的等价矩阵。
(3)对求得的模糊等价矩阵求λ截集,从而求得输入样本的分类情况。
3 基于EMD-SVD 的液压故障信号模糊聚类分析实验
实验选择了由某国家级实验教学示范中心自主研制的液压故障综合实验平台,并通过三轴传感器采集了液压机主油路、上升台和液压杆在泄漏4.44%、气穴2类故障情况下的x、y、z 三轴方向振动信号,其中,每个测点各采集10 个信号样本,共计30组信号。实验采样频率5000 Hz,采样点4096,其中,液压装置及信号采集点如图1 所示。具体实验步骤叙述如下。

图1 液压装置及测点图
3.1 原始振动信号采集
将采集故障信号做傅里叶变换,分别得到了正常、泄漏4.44%、气穴3类信号,频域图如图2所示。
3.2 小波重构分解
将振动信号x、y、z三轴幅值信号进行合成,合成公式如式(9)所示:

式中:dco为三轴合成幅值大小,dx、dy、dz分别为信号在x、y、z三轴上的幅值大小。

图2 3类振动信号x、y、z方向频域图
再进行4层小波分解,得到高频信号小波系数S1,低频小波系数S2、S3、S4、S5,分解后的频域信号如图3所示。
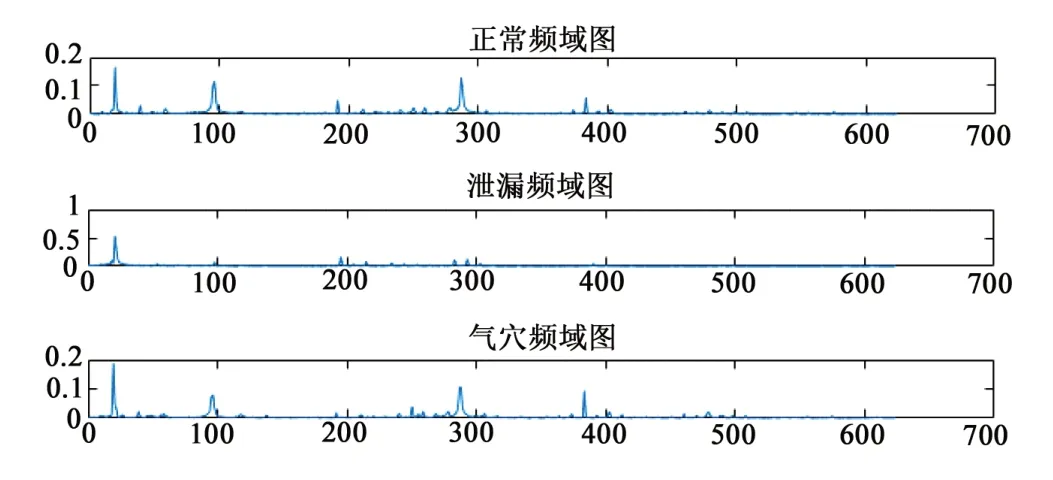
图3 小波分解后信号频域分布
将分解得到的5 个频段信号的小波系数平方后求和,再进行归一化得到E1、E2、E3、E4、E5,作为信号特征参数。得到了3类信号的能量分布情况,如表1所示。
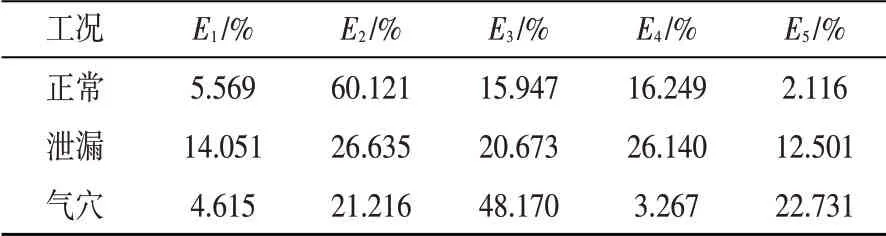
表1 信号各频带能量分布情况
根据各频带累加能量分布可以看出,正常信号主要分布于S2频带;泄漏信号分布于S2、S3、S4频带;而气穴信号主要分布于S3频带。
3.3 基于EMD-AR谱的Hilbert-Huang变换
提取3 类液压信号能量集中分布频段,其中提取了正常工况100~300 Hz频段信号;泄漏工况100~500 Hz频段信号;气穴工况300~400 Hz 频段信号。并对其进行Hilbert-Huang变换处理,具体步骤如下。
(1)将上述能量集中分布频段信号进行EMD分解,依次可以得到由高频到低频的IMF分量和残余分量。图4所示为3类信号的IMF分布情况。

图4 3类故障信号IMF分布情况
(2)提取前5 个IMF分量进行EMD-AR 谱分析,再次对其中主要频带信号进行提取,图5 所示为3 类信号的EMD-AR 谱能量分布情况。根据EMD-AR 谱分布情况,再一次对信号进行能量集中频带提取,可以看出,3类信号能量集中在100 Hz以及275 Hz频段。

图5 3类信号EMD-AR谱分布
3.4 奇异值分解信息提取
对EMD-AR 谱分析后提取的相关频段信号进行奇异值分解,由于提取信号中前5个IMF分量能量占比较大,因此选择其组成初始向量矩阵;对初始向量进行SVD,得到奇异值分解特征向量;再将其作为特征参数组成故障特征矩阵,由于信号的奇异值是描述信号在采样时间内各个频率段特征的参数,所以,振动信号在各种工况中不同频段的特征可以通过奇异值差异进行描述;实验中,对3类信号进行奇异值分解,得到如图1所示的主油路、上升台、液压杆3个测点的奇异值分解结果,如表2~4所示。
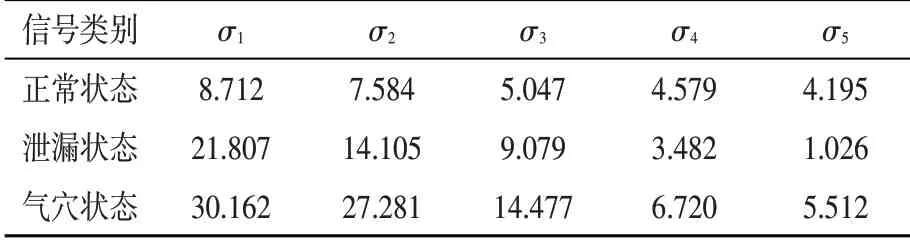
表2 测点1各工况信号奇异值分解结果

表3 测点2各工况信号奇异值分解结果

表4 测点3各工况信号奇异值分解结果
通过分析表2~4,可以得出如下结论。
(1)由于每个机械部件的固有频率不同,当运动机械部件产生冲击与振动传递到液压机表面时,其冲击与不同传递通道函数相作用后,液压机表面不同测点测得的振动信号频谱分布不同,因此经EMD分解后所得不同IMF分量奇异值不同。
(2)由于不同IMF分量奇异值反映了振动信号在采样时间内各频段信号的能量变化,因此可从奇异值大小比较中进一步提取出故障信号能量集中频段,根据表中数据发现,各个信号在σ1、σ2处出现最大奇异值,即在IMF1、IMF2处出现能量集中;同时,通过比较各状态奇异值差异可以发现,不同状态下各特征分量在3个测点中的差异性不明显;其中,正常信号特征分量取值范围在10~20;泄漏信号特征分量取值范围在20~30;气穴信号特征分量取值范围在30~40。在液压机3个测点中,泄漏、气穴状态下振动信号的奇异值要明显高于正常状态。
3.5 基于模糊聚类分析的故障识别结果对比
在故障信号识别阶段,将上述的小波分解重构信号、Hilbert-Huang变换信号、EMD-SVD信号作为模糊聚类分析的3类输入样本。其中,对于小波分解重构分解信号,提取了正常工况100~300 Hz 频段信号;泄漏工况100~500 Hz 频段信号;气穴工况300~400 Hz 频段信号。对于Hilbert-Huang变换信号,提取3类工况100 Hz及275 Hz附近频段信号,对于EMD-SVD变换信号,提取其分解后IMF1和IMF2所有频段信号。而在特征选取方面,提取了不同样本信号中4类特征,分别为方差、基频幅值和IMF 能量熵以及分解奇异值。现对采集的30类信号特征值大小进行分类,设30类样本组成分类集合X={x1,x2,…,x30},每种状态信号都有不同的特征值,对上述的方差、基频幅值、能量熵以及奇异值特征编号记为1、2、3、4。即xij={xi1,xi2,xi3,xi4}为第i 个信号的各个特征参数大小,从而得到关于30类信号的特征表,表5所示为其中测点1(主油路)EMD-SVD 信号的特征值情况,特征值大小根据极差变换进行了归一化[8]。计算式如下:


表5 标准化特征值表
对任意2个样本求其相关系数,可以得到1个10×10的模糊相似矩阵R,通过平方法求R的传递闭包t(R),经过多次运算后,必有R2k=(R2k)2,从而得到其模糊等价矩阵t(R)=R2k。再选取不同的阈值λ对10 组样本进行分类,分类结果如表6所示[9]。

表6 模糊聚类结果
同理,对小波重构信号,Hilbert-Huang 变换信号进行模糊聚类,得到了3处测点各类处理信号的识别准确率,识别结果如表7所示。

表7 3类信号在各测点识别结果
根据表中识别结果可以看出,在3 个测点中,所采集信号在识别过程中准确率差异不大;就3种工况信号各自识别率而言,气穴状态信号识别率较高,而正常信号与泄漏信号易出现混淆情况,从信号能量角度及故障机理分析,气穴现象由于气泡撞击机械部件产生高强度振动引起,而泄漏现象是由于油路泄漏而导致机械升力不足从而产生低频噪声,因此,气穴信号在能量特征识别中相比于正常信号和泄漏信号更具差异性;根据各类信号处理方式所得识别结果,发现基于EMD-SVD的信号提取方法在识别过程中展现出最高故障识别率,由于EMD-SVD信号处理方式同时提取了小波变换中能量集频段以及Hilbert-Huang 变换中的IMF 主分量,因此,可以认为EMD-SVD方法是在前两类方法的基础上再一次对频域信号进行的滤波操作,从而减少了识别过程中的噪声干扰因素,获得了最佳识别效果。
4 结束语
本文在EMD方法的基础上提出了一种基于SVD分解的模糊聚类分析故障诊断方法,图6 所示为此方法的具体实验流程。该方法利用小波变换和Hilbert-Huang 变换获得的能量集中频段进行奇异值分解,获得了各类信号奇异值这一特征;同时,将小波变换信号和Hilbert-Huang 变换信号作为对比输入信号。对提取的4类信号特征建立模糊矩阵,对模糊矩阵采用聚类分析得到了各类信号的识别率对比,从而验证了基于EMD-SVD的模糊聚类分析方法在气穴、泄漏2类液压故障诊断中的可行性和优越性。
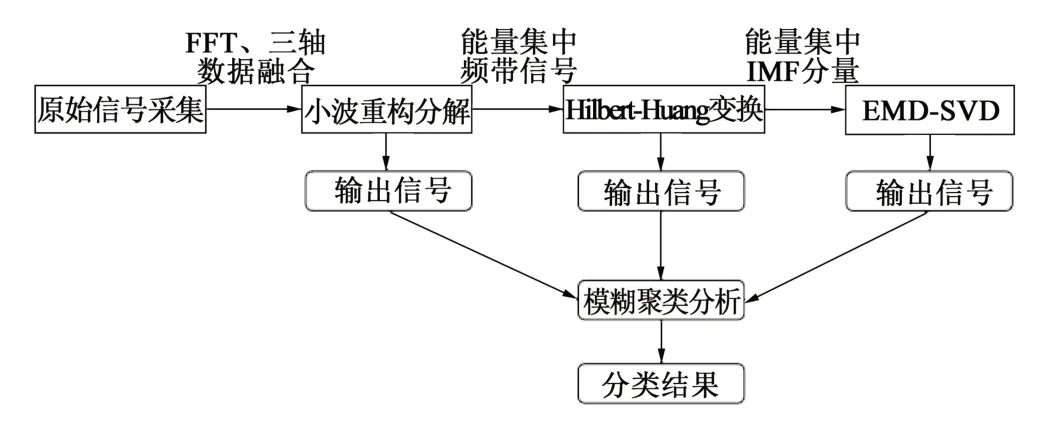
图6 基于EMD-SVD模糊聚类分析实验流程
猜你喜欢
机床与液压(2022年13期)2022-09-15
中国特种设备安全(2022年3期)2022-07-08
科技风(2021年19期)2021-09-07
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
农业机械学报(2020年9期)2020-10-10
电子制作(2019年13期)2020-01-14
航天电子对抗(2019年4期)2019-12-04
制造技术与机床(2017年10期)2017-11-28
CHIP新电脑(2016年3期)2016-03-10
