
空间对接电磁锁紧机构研究
2021-01-12 02:53楼雨涵解志坚王昊东
兵器装备工程学报 2020年12期
楼雨涵,解志坚,杨 臻,王昊东
(1.中北大学 机电工程学院, 太原 030051; 2.中国兵器工业试验测试研究院, 陕西 华阴 714200)
随着人类对空间探索需求的增加,航天器的功能越来越多,结构越来越复杂,空间对接技术是实现航天器在轨装配、补给、维修、升级的先决条件。传统空间对接技术多采用推力器配合机械式对接机构。目前国内外研究方案中,多采用机械臂配合电磁装置完成在轨对接,然后通过持续电磁引力完成两航天器的锁紧连接。电磁对接相对于传统空间对接具有低燃料消耗、无羽流污染、可小型化、连续可逆可无冲击对接等优势[1-4]。
本文通过对电磁式对接系统的研究,验证了电磁柔性对接的可行性,为以后对电磁对接的研究提供了一定参考价值。电磁柔性对接总体系统中包含机械结构锁,在完成电磁对接后,利用电磁力驱动锁紧装置完成主动卫星与被动卫星之间刚性锁紧连接。锁紧完成后系统可断电,有利于减少能源消耗,减少电磁场对工作元件的干扰。
1 电磁锁紧解锁结构
空间电磁对接系统主要由主动系统和被动系统两部分组成,如图1所示。主动系统包括:主动系统主电磁铁、主动系统副电磁铁、精对准齿、锁销槽、主动对接锥头。被动系统包括:被动系统主电磁铁、被动系统副电磁铁、锁紧/解锁电磁铁、精对准槽、锁紧插板、锁紧销、锁销弹簧,滑轨,滑块、被动对接锥口。

1主动对接锥头;2精对准齿;3锁销槽;4主动系统主电磁铁;5外壳;6后盖;7磁路;8电磁线圈(a) 主动系统

1被动对接锥口;2锁紧销;3锁销弹簧;4锁紧插板;5精对准槽;6外壳;7滑块;8滑轨;9被动系统主电磁铁;10主电磁铁定位件;11锁紧/解锁电磁铁定位板;12弹簧;13锁紧/解锁电磁铁;14后盖(b) 被动系统图1 空间电磁对接系统示意图
2 电磁锁紧解锁工作原理
主动卫星与被动卫星接触后进入锁紧位置后,需利用电磁锁紧机构进行两卫星之间的刚性锁紧,以确保两卫星之间的连接可靠。电磁锁紧机构由锁紧装置、锁紧/解锁电磁铁、主动系统和被动系统主电磁铁共同工作实现。利用电磁铁产生的电磁力进行对锁紧装置的驱动,减少了系统中的驱动种类,降低了系统的复杂度。
2.1 电磁锁紧工作原理
如图2所示,当锁紧/解锁电磁铁与被动系统主电磁铁之间产生电磁斥力,且主动系统主电磁铁与被动系统主电磁铁之间产生电磁引力时,被动系统主电磁铁带动滑块和斜面锁紧插板远离锁紧/解锁电磁铁。锁紧插板插入锁紧位置,锁紧插板斜面将锁销推入锁销槽,此时完成锁紧。锁紧完成后,系统可关闭所有电源。被动系统主电磁铁受力如图3所示。
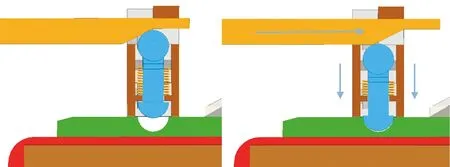
图2 锁紧动作工作流程示意图

图3 被动系统主电磁铁受力示意图
采用滑轨、滑块用于减少被动系统主电磁铁与外壳之间相对移动时的摩擦产生的阻力。为了减少锁销与锁紧插板的斜面之间相对滑动所产生的阻力,锁销(如图4)采用滑动轴承与锁紧插板的斜面接触。
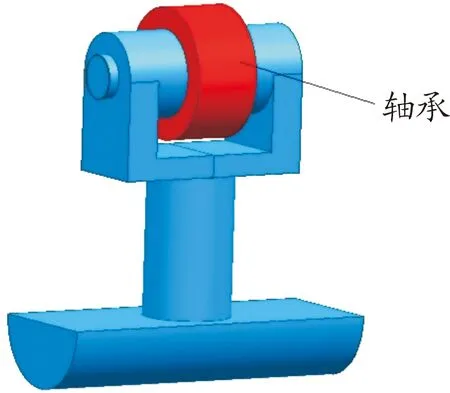
图4 锁销
2.2 电磁解锁工作原理
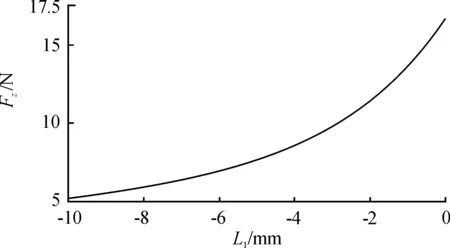
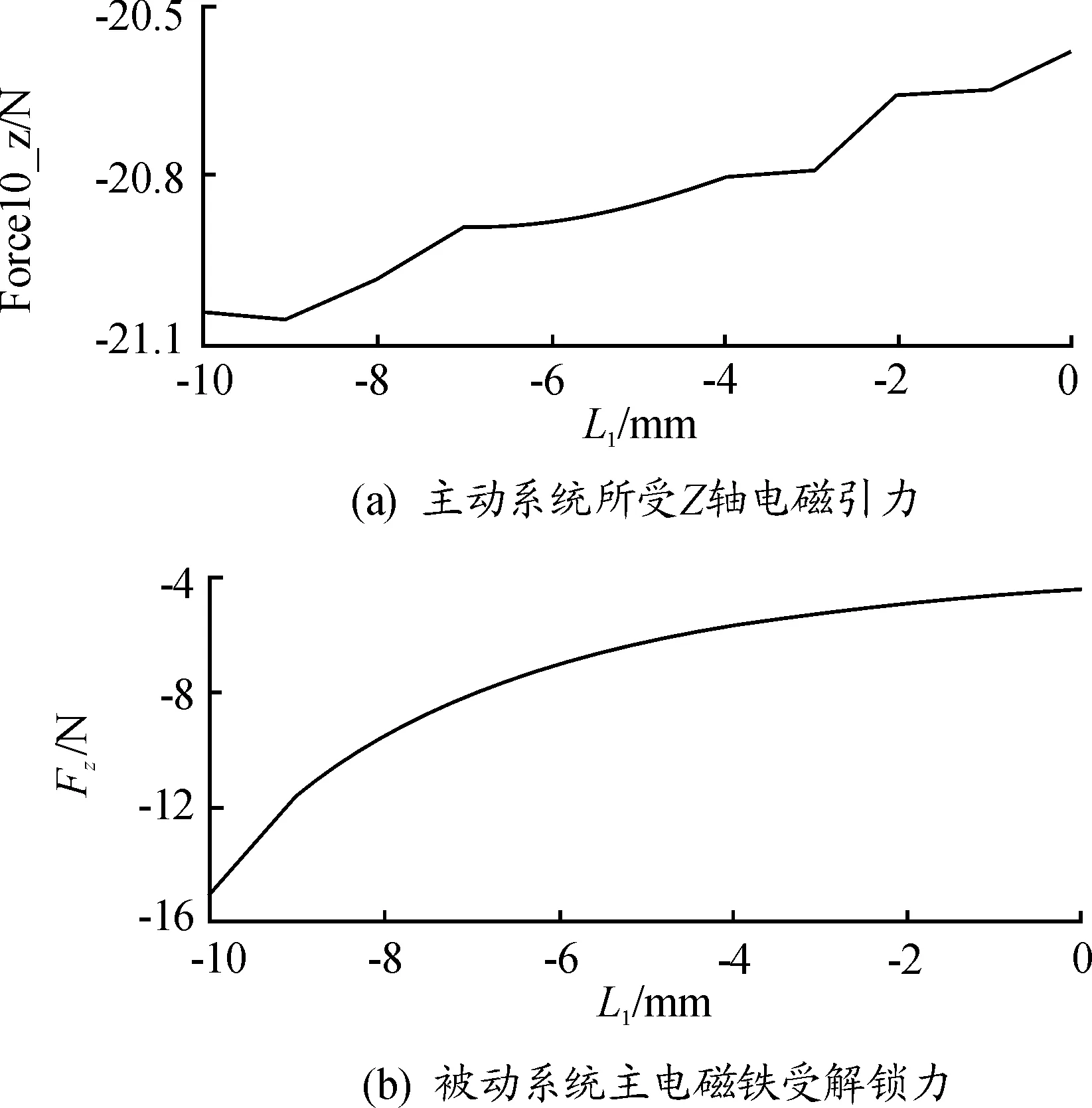
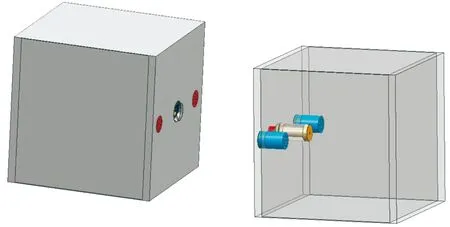
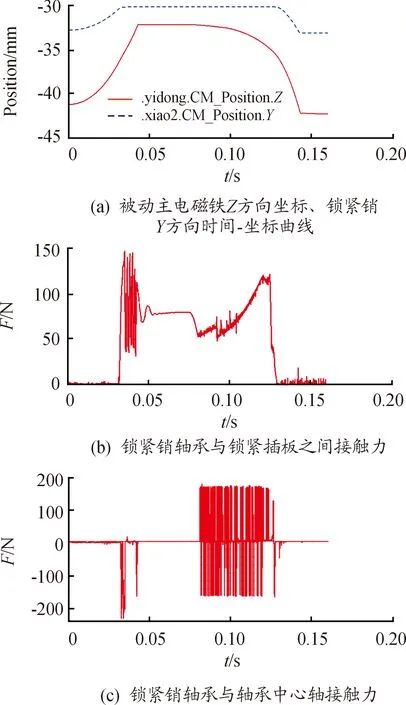
为获得最大解锁力,使锁紧/解锁电磁铁与被动系统主电磁铁之间产生电磁引力、主动系统主电磁铁与被动系统主电磁铁之间产生电磁斥力。锁紧/解锁电磁铁和主动系统主电磁铁共同对被动系统主电磁铁作用从而使得被动系统主电磁铁获得最大解锁力带动滑块和斜面锁紧插板,锁紧插板离开锁紧位置,锁销退出锁销槽,此时完成解锁。为了避免主动系统主电磁铁与被动系统主电磁铁之间产生电磁斥力时,主动卫星与被动卫星之间过早产生分离力而影响锁销退出锁销槽,主动系统和被动系统的副电磁铁之间应产生足够大的电磁引力,抵消主动系统主电磁铁与被动系统主电磁铁之间产生的电磁斥力,使得主动卫星与被动卫星之间合力为引力,从而不会释放分离。各电磁铁之间受力情况如图5所示,其中FA 图5 解锁时各电磁铁之间受力情况示意图 解锁时,锁销轴承在锁销弹簧的作用下与插板斜面时刻保持接触,锁紧插板退出锁紧位置时,锁销退出锁销槽。 为获取足够大的锁紧驱动力,需采用锁紧/解锁电磁铁和主动系统主电磁铁共同对被动系统主电磁铁作用的方式,即锁紧/解锁电磁铁与被动系统主电磁铁之间电磁斥力作用、主动系统主电磁铁与被动系统主电磁铁之间电磁引力作用。 根据系统总体结构设计,被动系统主电磁铁移动行程为10 mm,锁紧/解锁电磁铁与被动系统主电磁铁之间最小间距1 mm,主动系统主电磁铁与被动系统主电磁铁之间最小间距为3 mm。使用Maxwell 3D建模和电流方向、磁场如图6所示,其中被动系统主电磁铁沿Z轴移动的坐标范围L1=-10~0 mm(-10为解锁位置,0为锁紧位置)。电磁铁参数设置如表1。锁紧力FZ电磁力仿真曲线如图7。 图7 被动主电磁铁锁紧力仿真曲线 表1 锁紧时电磁铁参数 图6 锁紧时电磁铁Maxwell 3D建模和电流方向、磁场 使用Maxwell 3D建模和电流方向如图8所示,其中被动系统主电磁铁沿Z轴移动的坐标范围L1=-10~0 mm(-10为解锁位置,0为锁紧位置)。电磁铁参数设置如表2。电磁力仿真曲线如图9,Force10_z为主动系统所受Z轴电磁引力大小,Fz为被动系统主电磁铁受解锁力大小。由图9(a)可知Force10_z值为20.5~21.13 N,系统的合力始终为引力。 图8 解锁时电磁铁Maxwell 3D建模和电流方向 表2 解锁时电磁铁参数 图9 电磁力仿真曲线 在动力学建模中,当模型零部件较多,系统较为复杂时,为了能够更清晰的掌握运动规律,对模型进行合理的简化和假设,有利于减少多余的约束和接触力,减少计算量、节约计算时间,有利于动力学仿真[5-6]。故对模型进行以下简化和假设: 1) 如无具体要求或特殊说明时,模型的零部件均看作刚体[7]; 2) 模型按照实际的运动规律添加约束,不考虑模型的尺寸公差和误差; 3) 动力学仿真按照在空间环境下进行,不计重力加速度的影响,故重力加速度为零; 4) 相互接触且不参与运动的零部件之间进行布尔加和操作,作为一个零件处理,并与卫星之间添加固定副[8-9]。 使用三维建模软件UG对空间电磁柔性对接系统和卫星进行建模并导入ADAMS中。按照实际情况对零部件进行材料、约束、接触力的添加,并根据电磁力仿真结果和计算结果对模型相关零部件施加驱动、载荷。模型定义主动卫星与被动卫星以Z轴为对接轴,相对距离LZ=500 mm;以主动卫星为基准,将被动卫星以Z轴(滚转轴)为转轴旋转3°,即两卫星之间滚转角度差为3°;以被动卫星为基准,将主动卫星以俯仰轴为转轴旋转0.15°,即两卫星之间俯仰角度差为0.15°,空间电磁柔性对接系统ADAMS模型如图10所示。图11为仿真模型验证信息界面。 图10 空间电磁柔性对接系统ADAMS模型示意图 图11 空间电磁柔性对接系统ADAMS模型验证信息界面 锁紧与解锁过程动力学仿真针对主动卫星与被动卫星进入锁紧位置后的锁紧动作、解锁动作进行仿真计算。主要还原了锁紧/解锁动作过程,分析了机械结构的运动部件之间的受力情况。 各电磁铁Z轴方向受力曲线如图12所示。图12中正方向为引力,负方向为斥力。图12(b)和图12(c)中受力大小参照图7和图9参数设置;0.055~0.065 s时,图12(a)中一组副电磁铁负向的斥力150 N,则两组副电磁铁累积提供斥力300 N。 图12 各电磁铁Z轴方向受力大小曲线 运行锁紧与解锁过程动力学仿真曲线如图13所示。图13(a)中实线为被动系统主电磁铁、滑块、锁紧插板等移动部件的Z轴方向时间-坐标(位移)曲线;虚线为其中一个锁紧销Y轴方向时间-坐标(位移)曲线;图13(b)曲线为锁紧销轴承与锁紧插板之间Y轴方向接触力大小曲线;图13(c)曲线为锁紧销轴承与锁紧销轴承中心轴之间Y轴方向接触力大小曲线。 图13 锁紧与解锁过程动力学仿真曲线 结合图12和图13(a)可以看出,t=0~0.5 s时间段,被动系统主电磁铁和锁紧/解锁电磁铁之间为斥力,主动卫星主电磁铁与被动卫星主电磁铁之间为引力,此时被动系统主电磁铁移动至锁紧位置,锁紧销插入锁紧槽;t=0.75~0.16 s 时间段,副电磁铁之间相互引力维持卫星间连接状态,被动主电磁铁和锁紧/解锁电磁铁相互引力、主动卫星主电磁铁与被动卫星主电磁铁相互斥力,被动主电磁铁在两个力作用下反向移动10 mm逐渐返回解锁位置,锁紧销移动3 mm退出锁紧槽; 从图13(b)可以看出,t=0.03 s起,锁紧销轴承与锁紧插板开始接触,并且以锁紧动作和解锁动作时接触力最大,接触力最大值为147.2 N;t=0.055~0.065 s时间段,主、被动卫星之间受到300 N的轴向反作用力(分离力)时,锁紧销轴承与锁紧插板接触力最大为79.8 N;该数据将用于强度校核,检验锁紧销轴承与锁紧插板之间是否在受过大载荷时发生塑性形变; 从图13(c)可以看出,t=0.03 s起,锁紧销轴承与锁紧销轴承中心轴接触力以锁紧动作和解锁动作时接触力最大,最大值为243 N;t=0.055~0.065 s时间段,主、被动卫星之间受到300 N的轴向反作用力(分离力),锁紧销轴承与锁紧销轴承中心轴接触力最大为182 N;锁紧销轴承中心轴达到剪切强度。图中后期接触力发生跳变,是因为轴承与中心轴相对滑动的过程中,还有径向的碰撞,导致接触力振动,其大小不变,方向反复变化。 对系统电磁力充分合理利用,不需要额外的电机等驱动装置驱动,利用电磁柔性对接技术中电磁铁提供的电磁力驱动完成主动卫星与被动卫星之间刚性锁紧连接和解锁。利用Maxwell 3D对电磁锁紧与解锁释放技术所用电磁力进行仿真分析,仿真结果将用于验证电磁锁紧与解锁释放机构的可行性,电磁锁紧与解锁释放机构在动力学仿真方面基本符合预期设计。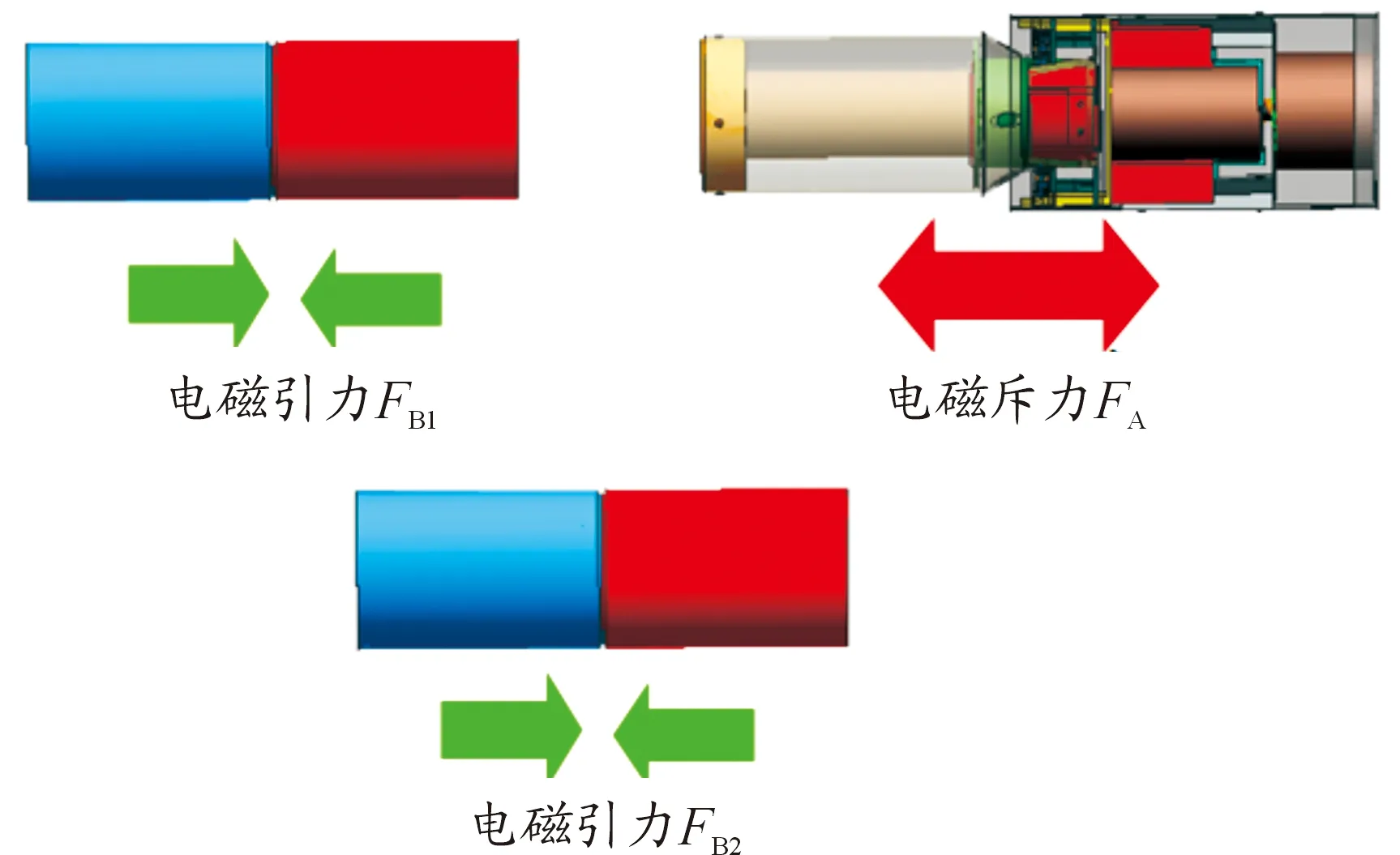
3 Maxwell 3D仿真
3.1 电磁锁紧过程


3.2 解锁力


4 动力学仿真
4.1 建模过程

4.2 仿真结果分析

5 结论
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
航空发动机(2022年3期)2022-10-13
机床与液压(2022年11期)2022-09-15
珠江水运(2021年7期)2021-05-06
铸造设备与工艺(2021年1期)2021-04-21
当代陕西(2020年15期)2021-01-07
中学生数理化·中考版(2017年1期)2017-03-29
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
第二课堂(课外活动版)(2015年4期)2015-10-21
湖北教育·教育教学(2014年2期)2015-01-17
