
基于Arduino 的水质监测和水质改善无人航行器设计
2021-01-11 11:40谢辰旻陈凌轩强嘉钰马帅华
水产养殖 2020年12期
谢辰旻,陈凌轩,强嘉钰,马帅华
(上海海洋大学工程学院,上海 201306)
环境中的中小型水域包括以河流湖泊为主的自然环境水域和以人工池塘、人工蓄水池(缸)为主的人工水域。近年来,随着人民生活水平的提高,一方面对于部分水产品的需求增加,水产养殖业发展速度加快,水产养殖面积不断扩大,同时带来不少环境污染问题;另一方面,大量兴建泳池、蓄水池,购置大型鱼缸等带来了水质清洁的问题。
水质的恶化将会带来生态效益和经济效益的退化。在水质监测设备中能够进行实时采集的指标包括:水温、pH 值、电导率和溶氧量[1]。为了监控水质污染问题,社会主流手段为引入监测站或浮标作为监测点进行定点监测和引入无人船进行动态监测。针对水质检测及数据反馈研发的一种大环境水域监测无人船[2],其主要基于多传感器和双通信链路,可对传感器采集到的水质数据进行实时传输和反馈。另外,在环境水域监测方面,水质监测浮标也发挥着重要作用,中科院南海海洋研究所曹文熙博士[3]提出了一种高度集成化的全天候数据采集和接收水质监测浮标装置,可以实现全天候的定点水质监测。现代水质监测手段明显存在自动化不足、站点不足、专业性缺乏的问题。从本团队的观点出发,前文所述两种手段均具有一定的优势,但存在以下三方面缺点:一是无法对深水水域进行水质监测并获取相应信息;二是所需空间大,适用于大中型水域;三是现有技术难以集水质改善和水质监测于一体。针对上述问题,该文设计制作了一款模块化的“水宝”装置。
1 方案综述
1.1 系统组成
水下机器人诞生已久,在日常生活中却很少出现,功能化的水下机器人更是少之又少。文献[4]描述的是一种用于探测、打捞的安保水下机器人;文献[5]根据仿生学原理,对鱼类进行仿生学分析设计了一种水下机器人。水下机器人或航行器的设计不同于地面驾驶工具的推进方式和机械结构,控制方式也有所不同,其用途正处于探索和开发阶段。该项目将水下航行器应用于水质监测和水质改善,给业界拓展了新思路。
“水宝”尺寸约为45 cm×20 cm×10 cm(长×宽×高)(图1)。装置采用胶囊型设计,配有紫外线灯杀毒以及清洁设备,采用模块化架构以实现更多的功能,设计三视图如图2 所示。“水宝”主要设计思路如下:
(1)胶囊状外形可使其在水中受压相同,适用于全水深作业。
(2)该装置可按照既定的路线,实现自主巡航。
(3)装置配备超声波传感器系统(声呐),可实现水下避障,在水下行驶更加高效、可靠。
(4)该装置的模块化结构可根据不同需求,搭载多种不同类型的模块,如各种传感器及自身运动姿态模块等各种其他功能模块。
对“水宝”装置的控制主要由下位机部分完成,下位机部分将Arduino Mega2560 作为主控制器,实现对卫星定位模块、深度计装置、动力推进系统、避障系统、传感器系统和水质改善系统等子系统的控制。将编写好的程序烧录到主控制板中,所有的系统都可发挥作用:卫星定位模块可确定自身所处的位置并为路径规划提供支持;深度计装置反馈所处深度;动力推进系统使得航行器可以在水下运动;避障系统确保“水宝”在水下避开障碍安全航行;传感器系统针对周围水环境作出分析,并将数据反馈至上位机平台;水质改善系统包括紫外线灯和pH值调节装置,用于改善水环境。下位机系统详细构成如图3 所示。
1.2 工作原理
“水宝”装置采用Arduino 作为装置主控制器,完成对各个模块的控制。“水宝”装置搭载GPS+BDS双模卫星定位系统和深度计装置,通过程序设定航行的终点和运行深度,“水宝”装置启动后自动向终点方向航行。航行过程中“水宝”装置搭载的多传感器可实现相应的功能:超声波传感器发射超声波用于实现水下自动避障;pH 传感器选用PHJ-100B 型pH 电极[6],可采集周围水环境pH 值数据,将数据传输给主控制器,通过将数值和标准值分析比对,“水宝”将向周围水环境释放酸性或碱性试剂用于改善局部水环境pH 值;同时温度传感器、浊度传感器、溶氧量传感器均可正常工作并采集相应数据。
2 功能设计
2.1 运动控制
定位模块采用GPS+BDS 双模定位系统结合深度计检测模块完成“水宝”自主巡航部分,与Arduino 单片机相连时,对应的引脚相连,PPS 引脚空出,即可和主控制器实现信息的交互。在“水宝”航行过程中,GPS 不断向外界发射位置信息,并交由控制器(单片机)进行数据处理,由此保证了“水宝”按照既定的路线航行。具体方法如图4、图5 所示:通过程序设定终点(C)后,得到若干预设点(A、B、C),在GPS 的作用下获取自身位置,并判断与结束点最近预设点的相对位置,做出行驶动作,重新获取自身位置,如此往复循环直至达到目标点,跳出循环。
深度检测模块感受水中压力测得深度,反馈给控制器,并根据当前深度和所需工作深度对螺旋桨朝向进行调整,实现“水宝”的上浮和下沉。
2.2 水质监测及水质改善
pH 值的测定通过pH 值检测采集传感器模块实现,当检测的pH 值趋近于0 时,电压为电源电压(5V);当pH 值上升时,模块输出电压下降,且模拟输出电压与pH 值呈线性关系。外接温度补偿电路部分可对pH 值进行校正,消除了温度对传感器准确性的影响。
该装置采用双蠕动泵进行pH 值改善,泵1 接酸性试剂,泵2 接碱性试剂。需要实现的pH 值目标值由软件输入,Arduino 主控制器分析外部水环境中检测所得到的pH 值数据。若水环境中pH 值较大,泵1 打开,释放一定剂量的酸性试剂,反复测定水域pH 值直到接近目标值时停止。若测出水环境中的pH 值较目标值小,则继电器闭合,泵2 打开,为反应液加碱性试剂直至达到目标值。具体流程框图如图6 所示。
3 试验
3.1 水质监测试验
水质监测试验通过收集巡航路线上采样点间的pH 值和温度值数据,验证“水宝”装置是否能够在不同水深条件下高效地测得相应的数据。该试验选取0 m(水面)、0.5 m(水下)和1 m(水下)三种深度分别进行测量。“水宝”装置的优越性在于在相同时间内测得多组数据,同时实现了全水深的高效工作。
水质监测试验获取数据如表1 所示。
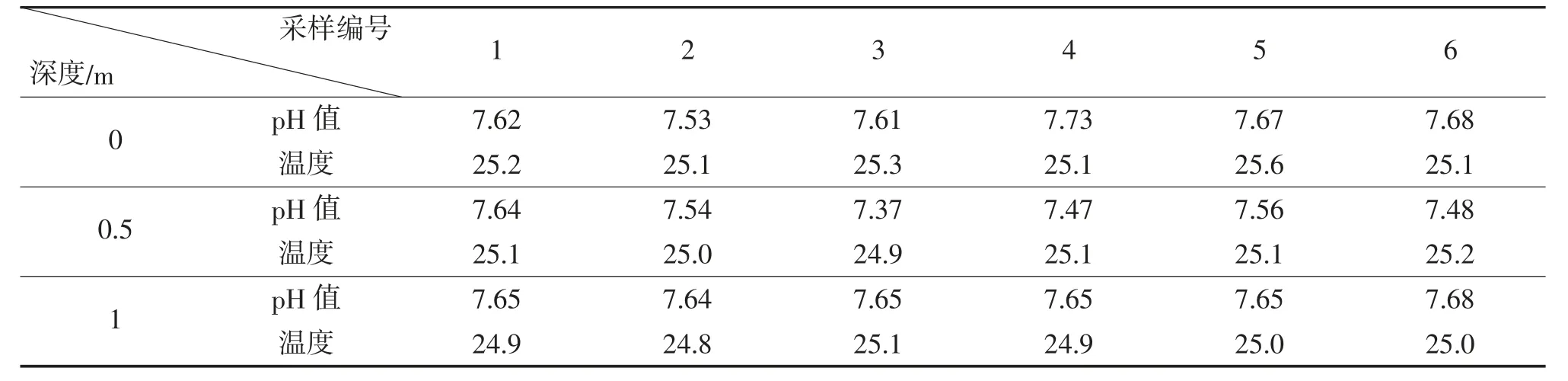
表1 水质监测采样数据表
3.2 酸性水域模拟调节试验
利用胶头滴管稀释配置pH 值为10.27 的NaOH溶液20 mL,倒入反应瓶A,向另外稀释用的瓶中加入经稀释后的NaOH(记为B 瓶)和HCl(记为C瓶)。将pH 计插入A 瓶,由于pH 值大于7.50,所以会立刻听到与C 瓶相连蠕动泵转动。将C 瓶中的酸液加入反应瓶A 中,直至pH 值小于7.50 时,停止转动。完成整个试验仅10 秒左右,试验所得数据如图7 所示,试验数据采集频率0.2 s/次。
3.3 碱性水域模拟调节试验
利用胶头滴管稀释配置pH 值为4.15 的HCl溶液20 mL,倒入反应瓶A,向另外稀释用的瓶中加入经过稀释后的NaOH(记为B 瓶)和HCl(记为C瓶)。将pH 值计插入A 瓶,由于pH 值小于6.50,所以会立刻听到与B 瓶相连蠕动泵启动。将B 瓶中的碱液加入反应瓶A 中,直至pH 值大于6.50 时,停止转动,从而达到试验目的。试验所得数据如图8 所示。
利用该装置,我们又取用了其他化学用液进行了试验测定,各次记录如下表2。
综上所述,可见“水宝”所携带的水质改善装置具有极高的效率,能够应对各种废液及各种pH 值环境。大大减少了改善水环境酸碱度所需要耗费的时间和人工成本,在中小型水域水质改善过程中可起到较大的作用。
4 结论
水质监测已经历了人工监测、仪器监测阶段,正在走向自动化监测阶段[7]。该文设计了一种基于Arduino 的水下航行器,“水宝”外观呈胶囊型,确保全身受力均匀可承载较大水压,适用于全水深工作环境;具备水质改善装置,能够以极高的效率将中小型水域的局部pH 值调节至正常范围;融合了多传感器技术,能够对中小型水域的pH 值等数据进行实时监测;结合了GPS 定位算法,通过超声波传感器实现自动避障,保证了“水宝”的稳定和正常工作。
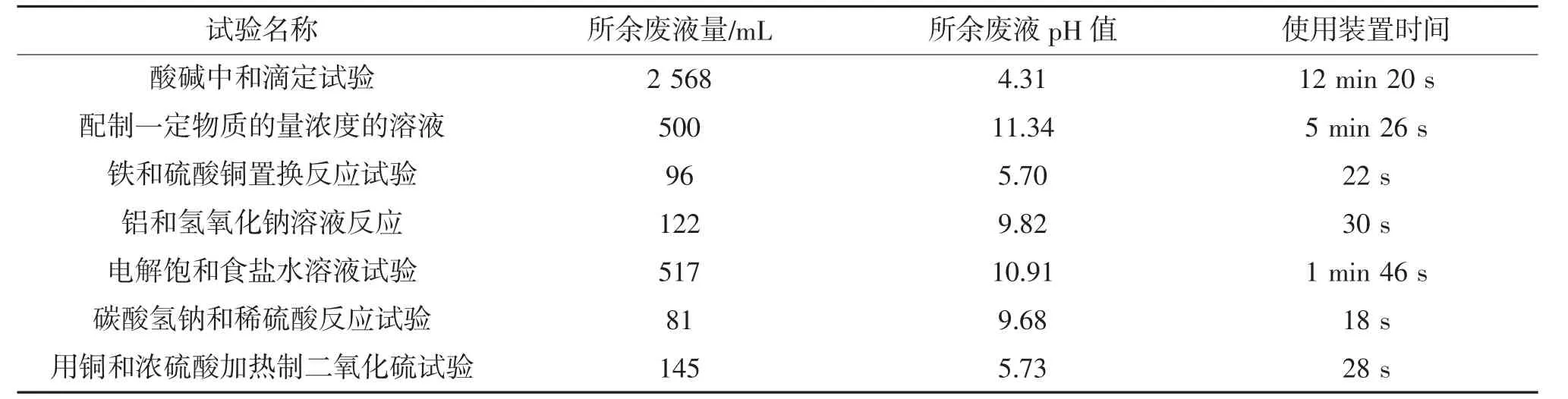
表2 处理实验室溶液记录表
“水宝”为各类型中小型水域提供全水深水质检测和水质改善服务,提高了中小型水域水环境检测效率,降低成本,对推广应用农业技术与装置和进行水质环境检测有促进作用,同时能使人们的生活质量得到保障和提升。
猜你喜欢
化工管理(2022年14期)2022-12-02
水上消防(2021年3期)2021-08-21
疯狂英语·新读写(2021年6期)2021-08-05
建材发展导向(2021年9期)2021-07-16
水上消防(2020年4期)2021-01-04
水上消防(2020年5期)2020-12-14
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
文史春秋(2019年11期)2020-01-15
建材发展导向(2019年10期)2019-08-24
